开闭用装置的制作方法
1.本发明涉及一种用于对滑动水口装置的开闭部进行开闭的开闭用装置,该滑动水口装置用于熔融金属的流量控制。
背景技术:
2.在使用于浇包或浇口盘的滑动水口装置中,使用2张或3张耐火材料制的板,各自板安装于各自的板收纳金属框。当该板发生损耗而到达寿命时,必须打开滑动水口装置而从各自板收纳金属框取出旧的板,之后更换为新的板。该更换作业不得不在高温下进行,另外如果板的重量重的话接近30kg,因此对作业者的负担较大。
3.于是,近年来,对使用机器人手臂进行板的更换作业的技术进行了研究。例如,本发明者在专利文献1中公开了能够安装于平衡装置或机器人手臂而保持板的板保持装置。当将该板保持装置安装于机器人手臂而更换板时,为了进一步减轻对作业者的负担等,对滑动水口装置的收纳有滑动板的滑动金属框、保持滑动金属框的滑动金属框保持部或用于施加面压的弹簧盒等开闭部的开闭作业,也希望通过机器人手臂进行。
4.但是,由于炼铁厂中滑动水口装置安装于浇包或浇口盘等钢液锅的底,因此在使用后拆卸板时,不得不在横向放倒钢液锅的状态下从钢液锅的底侧拆卸安装于滑动水口装置的板。此时,虽然通过吊车操作横向放倒钢液锅,但是吊车由人操作,因此放倒钢液锅的位置每次都以例如数厘米单位发生变化。
5.从而,为了通过机器人手臂的位置控制进行前述的对滑动水口装置的开闭部的开闭作业,必须每次都正确测定滑动水口装置的位置。近几年,使用机器人手臂时的对象物的位置测定通常采用如下方法,用相机拍摄对象物,通过图像处理对位置坐标进行补正。但是,关于滑动水口装置,知道了在该图像处理中存在如下问题,虽然上下左右方向的测定精度是实用水准的精度,但是前后方向(距离)的测定精度较差。
6.这是因为刚在高温中使用之后,在滑动水口装置的温度降低的途中进行拍摄,因此因热膨胀而滑动水口装置的拍摄基准部的大小在每次拍摄中都发生变化,所以尤其前后方向(距离)的位置坐标容易产生误差。而且,使用中在拍摄基准部产生凹凸部、伤或异物的附着等,这些也成为图像处理中产生误差的要因。
7.如果在滑动水口装置与机器人手臂之间的距离上产生测定误差,则无法正确执行对滑动水口装置的开闭部的开闭,例如当无法将滑动金属框打开到规定的位置时,在下一个工序中通过机器人手臂取出板时,滑动金属框因被按压而发生移动,产生无法用机器人手臂把持板的问题。另外,当滑动金属框未被完全关闭时,也产生在下一个工序中无法施加面压的问题。
8.像这样,由于滑动水口装置受1500℃以上的钢液的辐射热,而且保持高温钢液通过的板,并且在暴露于钢液飞溅、粉尘的非常苛刻的条件下被使用,因此知道了采用现有的位置测定方法会存在距离的测定精度变差的问题。
9.专利文献
专利文献1:国际公开2018/074424号
技术实现要素:
10.本发明所要解决的技术问题是提供一种开闭用装置,其能够将滑动水口装置的开闭部确实地开闭到规定的位置。
11.根据本发明,提供一种如同以下所述的开闭用装置。1.一种开闭用装置,用于对滑动水口装置的开闭部进行开闭,在机器人手臂具备配合于滑动水口装置的开闭部的手顶端部和检测该手顶端部承受的力的力传感器而构成。2.所述1所记载的开闭用装置,手顶端部在相对于滑动水口装置的开闭部具有水平方向的间隙的状态下,可活动地嵌合而配合于开闭部。3.所述1或所述2所记载的开闭用装置,手顶端部可装拆地保持于板保持装置,该板保持装置可保持滑动水口装置用的板。4.所述1至所述3的任意一项所记载的开闭用装置,板保持装置具有:多个保持部,用于保持手顶端部;缩放单元,对所述多个保持部间的间隔进行缩放;及压紧部,在用所述多个保持部保持着手顶端部时,按压该手顶端部。5.所述1至所述4的任意一项所记载的开闭用装置,具有对机器人手臂的动作进行控制的控制部,所述控制部通过对机器人手臂的动作控制,使手顶端部朝着滑动水口装置的开闭部进行移动,而使手顶端部配合于滑动水口装置的开闭部,在所述力传感器检测的力的绝对值为规定的阈值以下的条件下,使手顶端部移动而对开闭部进行移动,当所述力传感器检测的力的绝对值到达规定的阈值时,结束手顶端部的移动。
12.根据本发明,能够将滑动水口装置的开闭部确实地开闭到规定的位置。
附图说明
13.图1是本发明的一个实施方式即开闭用装置的主要部分的侧视图。图2是图1所示的开闭用装置中的手顶端部的平面图。图3是图2所示的手顶端部的立体图。图4是图1所示的开闭用装置中的板保持装置的侧视图。图5是本发明的一个实施方式即开闭用装置的整体结构图。图6是图5所示的开闭用装置的动作示意图。图7同上。图8同上。符号说明1
‑
开闭用装置;101
‑
板保持装置;102
‑
凸缘部;2
‑
手顶端部;21
‑
环;22
‑
保持杆;23
‑
基座板;24
‑
突起;3
‑
平行手(缩放单元);31
‑
平行爪;32
‑
本体部;4
‑
保持部;41
‑
配合槽;9
‑
压紧部;91
‑
保持板;92
‑
压紧板;93
‑
螺栓;94
‑
螺旋弹簧;95
‑
基板;10
‑
力传感器;11
‑
浇包;111
‑
浇包的底;12
‑
地面;13
‑
浇包承接部;14
‑
滑动水口装置;141
‑
固定金属框;142
‑
滑动金属框;143
‑
滑动金属框保持部;145
‑
配合杆;15
‑
机器人手臂;16
‑
立体传感器;16a
‑
相机;16b
‑
激光
照射仪;17
‑
控制部;18
‑
机器人手臂用的台架。
具体实施方式
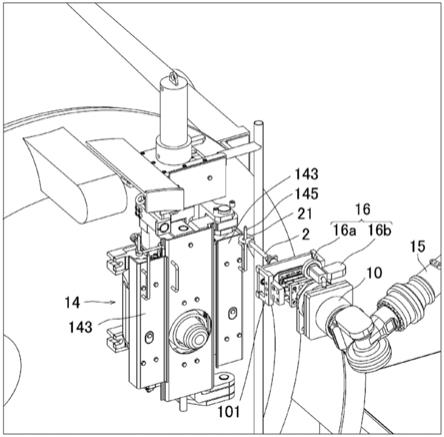
14.如图1所示,本发明的一个实施方式即开闭用装置1具有:手顶端部2;可装拆地保持手顶端部2的板保持装置101;及安装在板保持装置101的手顶端部2的相反侧的力传感器10,例如图5所示地在机器人手臂15具备这些而构成。
15.如图2及图3所示,手顶端部2由作为配合部的环21和保持该环21的保持杆22和在中央部固定有保持杆22的基座板23所构成。基座板23是长方形的金属板,在环21的相反侧的面上设置有2个突起24。
16.板保持装置101使用专利文献1中已公开的板保持装置,能够可装拆地保持本发明的一个实施方式即开闭用装置1的手顶端部2和滑动水口装置用的板。
17.如图4所示,板保持装置101是在专利文献1的板保持装置中在作为缩放单元的平行手3的压紧部9的相反侧设置有力传感器10的装置。即,该板保持装置101具有:作为缩放单元的平行手3;设置于平行手3的平行爪31的一对(2个)保持部4;设置在平行手3的本体部32前部的压紧部9;及设置在平行手3的压紧部9的相反侧的力传感器10。另外,在保持部4两侧的顶端部,分别具有2个配合槽41。
18.并且,缩放单元并不限定于平行手3,而是例如还可以使用平行吸盘,而且还可以用液压缸或气缸等制作。另外,缩放单元并不限定于一定在将一对保持部4保持成平行的状态下进行缩放的结构,而是例如还可以是通过一对保持部的以根端部(交点)为中心的转动动作来缩放一对保持部的顶端部间的间隔的结构。
19.如图1所示,该板保持装置101用保持部4保持手顶端部2的基座板23的4个角部,同时使压紧部9抵接于基座板23的突起24,由此能够稳定且确实地保持手顶端部2。
20.作为压紧部9,7根螺栓93分别穿通保持板91的7个穿通孔和7根螺旋弹簧94之后固定于基板95。该基板95安装于平行手3的本体部32。保持板91上设置间隙而固定压紧板92,保持板91与压紧板92呈一体化。而且,压紧板92能够向基板95侧移动而使螺旋弹簧94发生挠曲。此时,通过在保持板91的穿通孔与螺栓93之间设置间隙,从而使压紧板92即使在发生倾斜的状态下也能够进行移动。该压紧板92的位置被设定为,当保持部4(配合槽41)保持着手顶端部2的基座板23时螺旋弹簧94发生挠曲的位置,其结果,手顶端部2的基座板23处于压紧于配合槽41的压紧部9的相反侧的内壁面的状态。
21.用螺栓将力传感器10安装于平行手3的本体部32的压紧部9的相反侧的凸缘部102。即,力传感器10是检测保持部4及/或压紧部9从手顶端部2承受的力的力传感器。并且,如此检测力的力传感器也被称为力觉传感器,可使用机器人手臂等上通常使用的力传感器。并且,本实施方式中,作为力传感器10使用6轴力传感器。
22.接下来,参照图5对本发明的一个实施方式即开闭用装置的整体结构及使用状态进行说明。并且,在图5及后述的图6~图8中,适当简化表示了包含力传感器10的板保持装置101的结构。
23.图5中,铸造刚结束之后的浇包11横向放倒在设置于地面12的浇包承接部13上。在该浇包的底111安装有滑动水口装置14,在图5的状态下,滑动方向大致成为铅直。
24.另一方面,机器人手臂15的根端固定在设置于地面12的机器人手臂用的台架18,
在该机器人手臂15的顶端,通过螺栓安装有板保持装置101的力传感器10的凸缘部。而且,板保持装置101中保持有手顶端部2。此时,力传感器10与机器人手臂15的顶端部以中心轴呈一致的方式被串联配置。并且,力传感器10还可以从板保持装置101独立而设置于机器人手臂15侧。即使在此时,力传感器10与机器人手臂15的顶端部也以中心轴呈一致的方式被串联配置。并且,该机器人手臂15是6轴垂直多关节机器人手臂,可自如活动安装在其顶端的手顶端部2的姿势、位置。
25.在机器人手臂15的顶端部分,安装有具有相机16a和激光照射仪16b的立体传感器16。通过相机16a拍摄的图像输入到图像处理装置,通过图像处理法补正三维位置坐标。通过向控制部17输入该坐标信息,机器人手臂15能够使板保持装置101移动到滑动水口装置14的开闭部。另一方面,力传感器10的信息始终输入到控制部17。而且,控制部17根据力传感器10的信息等,介由机器人手臂15对手顶端部2的动作进行控制。
26.接下来,参照图6~图8对打开安装于铸造结束之后的浇包11的底111的滑动水口装置14的开闭部之一即滑动金属框保持部143的方法进行说明。
27.首先,图6中,从激光照射仪16b朝着滑动水口装置14的滑动金属框保持部143照射激光,用相机16a拍摄并进行图像处理,由此计算滑动金属框保持部的离基准位置的偏离而对滑动金属框保持部143的三维位置坐标进行补正。通过向控制部17(参照图5,以下相同)输入该被补正的滑动金属框保持部143的三维位置坐标,由此机器人手臂15进行动作而使安装于机器人手臂15的手顶端部2移动到图6的位置。本实施方式中,在滑动金属框保持部143设置有用于与手顶端部2配合的被配合部即配合杆145。手顶端部的环21能够在具有间隙的状态下可活动地嵌合而配合于该配合杆145。即,前述的图6的位置是手顶端部2的环21配合于滑动金属框保持部143的配合杆145的状态。通过如此使配合杆145与环21在具有水平方向的间隙的状态下可活动地嵌合而配合,由此即使在前述的滑动金属框保持部143的三维位置坐标上产生些许误差,配合杆145与环21也能够发生配合。本实施方式中,配合杆145的外径为12mm,环21的内径为40mm,水平方向上在单侧具有14mm的间隙。虽然可根据前述的立体传感器16等位置测定装置的测定精度决定该间隙,但是例如可做成在单侧5mm~20mm。
28.从该图6的状态,通过控制部17对机器人手臂15的动作控制,手顶端部2开始在打开滑动金属框保持部143的方向上进行移动。此时,手顶端部2承受拉伸方向的力,由力传感器10检测该力。本实施方式中,该拉伸方向的力作为负值而被检测。而且在本实施方式中,在该拉伸方向的力的绝对值为规定的阈值以下的条件下,使手顶端部2移动而打开滑动金属框保持部143。
29.在此,由于滑动水口装置是为了在高温下进行钢液的流量控制而被使用,因此因滑动金属框保持部143等的开闭部发生烧结或者钢液、炉渣发生粘合而有时需要用较大的力来打开开闭部或者有时难以打开。在这样的情况下,如果强行驱动机器人手臂15,则有可能手顶端部2、板保持装置101或机器人手臂15自身等受损伤。为了防止这样的损伤,在力传感器10检测的力的绝对值为规定的阈值以下的条件下,使手顶端部2进行移动。
30.并且,为了探测到手顶端部2的环21未能与滑动金属框保持部143的配合杆145发
生配合的情况,还可以事先决定力传感器10检测的力的绝对值的下限值。即,当移动手顶端部2时,在力传感器10检测的力的绝对值小于规定的值(所述下限值)的情况下,可判断为手顶端部2的环21未能与滑动金属框保持部143的配合杆145发生配合。考虑该点,本实施方式中,手顶端部2的移动还可以在力传感器10检测的力的绝对值处于规定的范围(处于所述下限值以上、所述规定的阈值以下)内的条件下进行。
31.当逐渐打开滑动金属框保持部143时成为图7的状态,当完全打开时成为图8的状态。该图8的状态为,无法进一步打开滑动金属框保持部143,力传感器10检测的力的绝对值到达规定的阈值的状态。本实施方式中,当如此力传感器10检测的力的绝对值到达规定的阈值时,结束手顶端部2的移动。
32.在此,虽然由立体传感器16计测滑动金属框保持部143的三维位置坐标,但是因已叙述的理由,在该位置坐标上有可能产生误差。从而,如果通过位置控制对机器人手臂15进行驱动,则因该误差而有可能产生并未将滑动金属框保持部143打开到规定的位置的情况,这样,在下一个工序中用机器人手臂15拆卸板的操作上发生事故。或者,虽然滑动金属框保持部143已经打开到规定的位置,但是在进一步打开的方向上手顶端部2移动时,有可能手顶端部2、板保持装置101或机器人手臂15等受损伤。为了防止这种情况发生,当力传感器10检测的力的绝对值到达规定的阈值时,结束手顶端部2的移动。
33.并且,虽然滑动金属框保持部143分别位于滑动金属框142的两侧,但是在本实施方式中2个滑动金属框保持部143通过联杆(link)被连结,成为当对一方滑动金属框保持部143进行开闭时,另一方也联动而开闭的机构。
34.接下来,对关闭滑动金属框保持部143的动作进行说明,由于该动作是与前述的打开滑动金属框保持部143的动作呈相反的动作,因此从图8的状态开始说明。
35.图8中,根据来自控制部17的滑动金属框保持部143的位置坐标信息,通过机器人手臂15移动手顶端部2,使手顶端部2的环21配合于滑动金属框保持部143的配合杆145。
36.之后,使手顶端部2在滑动金属框保持部143关闭的方向上进行移动。此时,手顶端部2承受拉伸方向的力,由力传感器10检测该力。本实施方式中,如同前述,该拉伸方向的力作为负值而被检测。而且在本实施方式中,在该拉伸方向的力的绝对值为规定的阈值以下的条件下,移动手顶端部2来关闭滑动金属框保持部143。当逐渐关闭滑动金属框保持部143时成为图7的状态,当完全关闭时成为图6的状态。该图6的状态为,无法进一步关闭滑动金属框保持部143,力传感器10检测的力的绝对值到达规定的阈值的状态。本实施方式中,当如此力传感器10检测的力的绝对值到达规定的阈值时,结束手顶端部2的移动。
37.并且,在以上说明的实施方式中,虽然作为滑动水口装置的被配合部而设置配合杆145且作为手顶端部的配合部而设置环21,但是还可以与此相反作为滑动水口装置的被配合部而设置环且作为手顶端部的配合部而设置配合杆。另外,被配合部与配合部的形状并不限定于杆与环。总而言之,只要是滑动水口装置的被配合部与手顶端部的配合部发生配合的形状即可。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1