机器人手的制作方法
1.本发明涉及一种机器人手。
背景技术:
2.专利文献1描述了一种机器人手。在这样的机器人手中,爪构件通过由马达驱动的齿轮的啮合来驱动。
3.现有技术文献
4.专利文献
5.专利文献1:日本经审查的实用新型申请公报no.3214039
技术实现要素:
6.本发明要解决的问题
7.在上述专利文献1中,爪部分在机器人手的轴向方向上固定到齿轮的前侧。因此,由爪部分抓取的物体存在限制。此外,由于齿轮的周边由盖覆盖,因此机器人手的尺寸增大。此外,由于爪部分和齿轮被固定在该处的部分周围的区域也由盖覆盖,因此在更换爪部分时首先需要拆卸这样的盖,这使更换工作变得复杂。
8.本发明的目的是提供一种机器人手,其中待抓取对象的范围扩大,尺寸减小,并且爪部分易于更换。
9.解决问题的手段
10.上述目的是通过一种机器人手实现的,所述机器人手包括:马达,所述马达具有旋转轴;容纳构件,所述容纳构件容纳所述旋转轴的远端;多个摆动构件,所述多个摆动构件由于所述旋转轴的旋转而相对于所述容纳构件摆动;以及多个爪构件,所述多个爪构件与所述多个摆动构件一起摆动,其中,在所述旋转轴的外周上设置有蜗杆部分,所述摆动构件包括:蜗轮部分,所述蜗轮部分设置在所述摆动构件的外周的一部分上并与所述蜗杆部分啮合;以及固定表面,所述固定表面设置在所述摆动构件的所述外周的一部分上,并且相对于所述摆动构件的摆动中心位于所述旋转轴的相对侧,所述爪构件通过第一固定构件以可拆卸的方式固定到所述固定表面,并且所述容纳构件暴露所述第一固定构件,使得所述第一固定构件能够拆卸。
11.本发明的效果
12.能够提供一种机器人手,其中待抓取对象的范围扩大,尺寸减小,并且爪部分易于更换。
附图说明
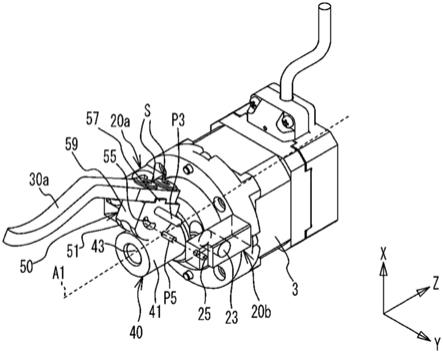
13.图1是机器人手的立体图;
14.图2是机器人手的局部截面图;
15.图3是示出支架的内部构造的视图;
16.图4a和图4b是旋转轴的外观图;
17.图5a至图5c是摆动构件的外观图;以及
18.图6是示出调整垫片的局部立体图。
具体实施方式
19.图1是机器人手1的立体图。图1示出了彼此正交的x、y和z方向。机器人手1包括马达3、支架10、支撑构件20a和20b、爪构件30a至30c以及盖60。马达3是驱动装置(例如步进马达),以用于打开和闭合爪构件30a至30c。
20.支架10附接到马达3的远端侧。爪构件30a至30c由支架10可摆动地保持,这将在后面详细描述。尽管支架10形成为基本上圆柱形形状,但在外周侧表面上以基本上相等的角度间隔形成三个凹部15。支撑构件20a和20b被保持在一个凹部15中,并且爪构件30a绕其近端部分可摆动地被支撑在支撑构件20a和20b之间。这同样适用于其他的爪构件30b和30c。因此,爪构件30a至30c绕平行于z方向的中心轴线a1以相等的角度间隔布置。爪构件30a至30c具有相同的形状,但为了便于说明而具有不同的附图标记。盘状的盖60固定到支架10的远端侧。盖60形成有开口61,使得中心轴线a1穿过盖60。
21.图2是机器人手1的局部截面图。在图2中,没有示出马达3。如图2中所示,爪构件30a的近端部分通过螺钉s固定到摆动构件50。将在后面详细描述该摆动构件50。旋转轴40是马达3的旋转轴。旋转轴40的远端容纳在支架10中。支架10是容纳构件的示例。当旋转轴40旋转时,摆动构件50在预定范围内摆动,并且当摆动构件50摆动时,爪构件30a也在预定范围内摆动。这同样适用于爪构件30b和30c。即,爪构件30a至30c根据旋转轴40的旋转而打开和闭合,从而抓取物体。在图2中,以简化的方式示出了旋转轴40和摆动构件50。
22.图3是示出支架10的内部构造的视图。图3中没有示出支架10、盖60以及爪构件30b和30c。在图3中,以简化的方式示出了旋转轴40。此外,在图3中,为了便于理解,支撑构件20b被示出为远离摆动构件50。图4a和图4b是旋转轴40的外观图。图5a至图5c是摆动构件50的外观图。首先,将描述旋转轴40。旋转轴40具有蜗杆部分41,该蜗杆部分41形成在从马达3的主体突出的远端侧的外周部分上,并形成为具有通孔43的中空轴形状。蜗杆部分41可以通过切割旋转轴40等形成,或者可以具有使蜗杆部分41装配到旋转轴40的圆柱形构件(未示出)。最终,该结构只需将蜗杆部分41一体地设置在旋转轴40的外周部分上。通孔43在轴向方向上穿透旋转轴40的旋转中心。通孔43的直径在旋转轴40的纵向方向上是恒定的,但不限于此。在轴向方向上从旋转轴40的中央到近端侧形成有具有恒定外径的圆柱形外周表面45,并且构成马达3等的永磁体(未示出)固定到圆柱形外周表面45。旋转轴40由诸如不锈钢之类的金属制成,但不限于此。
23.由于旋转轴40以这种方式形成为中空轴形状,并且由于旋转轴40的通孔43和盖60的开口61如图2所示彼此连通,因此能够通过在内部安装对待抓取对象进行拍照的相机、通过通孔43和开口61向待抓取对象注入和抽吸空气的空气抽吸/喷射装置等来实现多功能性。此外,由于旋转轴40形成为中空轴形状,其重量减小,因此整个机器人手1的重量也减小。此外,能够适当地消散从马达3产生的热以及由于蜗杆部分41和蜗轮部分51的啮合而产生的摩擦热,这将在后面描述。
24.摆动构件50形成为具有预定厚度的基本上扇形形状。形成有在厚度方向上穿透的
中心孔53。如图3中所示,支撑销p3压配合到中心孔53中,以在厚度方向上穿透摆动构件50。支撑销p3的一端由插入图3中所示的支撑构件20b的保持孔23中的轴承(未示出)可旋转地支撑。同样,支撑构件20a也支撑支撑销p3的另一端以供旋转。摆动构件50由例如铁基金属制成,但摆动构件50不限于此。
25.蜗轮部分51形成在绕中心孔53形成为弧形形状的部分中,该蜗轮部分51具有多个齿。蜗轮部分51形成在绕中心孔53的预定角度范围内。与爪构件30a至30c打开所处的角度相比,形成蜗轮部分51所处的角度需要足够大,以确保齿轮的啮合。在图2中,蜗杆部分41和蜗轮部分51之间的啮合范围约为40度。在图1至图3所示的机器人手1中,通过将蜗轮部分51形成为超过大约100度,在闭合状态下的角度为0度时,能够绕作为旋转轴线的中心线的中心轴线a1将爪构件30a至30c打开至约60度。此外,如果将蜗轮部分51形成为接近130度(未示出),则能够绕中心轴线a1将爪构件30a至30c打开到约90度。此外,如果通过减小后面描述的表面56的面积而不提供后面描述的表面59而将蜗轮部分51形成为达约270度(未示出),则能够将爪构件30a至30c最大限度地打开为180度或更大,并且能够将爪构件30a至30c容纳到设置在机器人手1的外边缘上的凹槽(未示出)中。所述的这些值仅用于本实施方式,并且啮合量(在以上示例中为40度)受基于所需规格的齿轮设计参数的影响。因此,取决于设计,爪构件30a至30c的可打开范围可能大于或小于上述示例。此外,表面56和59在绕作为中心的中心孔53的外周方向上连续地形成在图5中所示的蜗轮部分51上。表面56和59基本上彼此正交。与蜗轮部分51不同,表面56和59上没有形成齿。如上所述,摆动构件50不在整个外周上都设置有齿,并且在外周的一部分上形成蜗轮部分51,因此尺寸减小。
26.如图2和图3中所示,蜗轮部分51与旋转轴40的蜗杆部分41啮合。因此,当旋转轴40旋转时,摆动构件50绕作为支点的支撑销p3摆动,这打开和闭合爪构件30a。同样,用于使爪构件30b和30c摆动的摆动构件的蜗轮部分也与旋转轴40的蜗杆部分41啮合。因此,旋转轴40的旋转使三个爪构件30a至30c打开和闭合,该爪构件抓取待抓取对象。此外,由于马达3是步进马达,因此能够将旋转轴40停止在预定的旋转角度位置。因此,能够将爪构件30a至30c中的每一个停止在摆动范围内的预定位置。
27.在此,将描述使用蜗杆的效果。由于蜗杆部分41和蜗轮部分51彼此啮合作为蜗轮蜗杆,与使用例如其中正齿轮彼此啮合的动力传输机构的情况相比,能够实现小尺寸和大减速比。这使得能够确保爪构件30a至30c的小尺寸以及强大的抓取力。此外,通过实现大的减速比,能够提高爪构件30a至30c的打开和闭合操作的位置精度。此外,由于蜗杆部分41一体地形成在马达3的旋转轴40中,因此与旋转轴和蜗杆单独形成的情况相比,有利于小型化。此外,自锁作用通过减小蜗杆的导程角以便设定蜗杆部分41和蜗轮部分51的大减速比来起作用。因此,即使当对爪构件30a至30c中的任一者施加外力时,从蜗轮部分51传输到蜗杆部分41的外力也会导致旋转轴40不旋转,从而抑制爪构件30a至30c的位置位移。这使得即使在马达3处于非通电状态时,也能够将爪构件30a至30c维持在预定位置,并且这使得即使在抓取工件(待抓取对象)后切断对马达3的供电,也能够维持抓取状态。即,由于实现了非供电抓取,因此提高了节能性,并且由于不会因意外断电等而释放对工件的抓取,因此也提高了安全性。
28.突出部分57形成在表面56上,并且与形成在爪构件30a的近端部分处的凹形部分接合,如图3中所示。此外,两个螺钉孔58形成在表面56上以便夹住突出部分57,并拧上上述
螺钉s。在此,支架10形成为暴露上述螺钉s的头部。利用这样的结构,能够容易地拆卸螺钉s,并容易地更换爪构件30a,从而在由于磨损或断裂,或由于工件(待抓取对象)的类型进行更换的情况下减少作业过程。以这样的方式,爪构件30a的可更换性得到了改善。爪构件30a的高更换可作业性意味着机器人手1的高组装可作业性,这减少了组装过程,从而有助于降低生产成本。这同样适用于其他爪构件30b和30c。此外,由于支架10形成为暴露上述螺钉s的头部,因此机器人手1的尺寸减小,更具体地,在绕中心轴线a1的径向方向上的尺寸减小。螺钉s是第一固定构件的示例。
29.另外,爪构件30a固定到摆动构件50的相对于摆动构件50的摆动中心设置在与旋转轴40相对的一侧的表面56。换句话说,爪构件30a的近端部分相对于摆动构件50的摆动中心在绕中心轴线a1的径向方向上固定到外部。即,确保了爪构件30a的近端部分与中心轴线a1之间的宽的距离,这同样适用于其他爪构件30b和30c。因此,能够抓取大构件,并且待抓取对象的范围也扩大了。以这种方式,能够通过机器人手1抓取大构件,并且尺寸减小。
30.在摆动构件50的扇形侧表面52a上形成有绕中心孔53的弧形调节凹槽55。此外,如图3中所示,支撑构件20b形成为基本上矩形的形状,在面向摆动构件50的侧表面52a的表面上形成有装配孔25,并且调节销p5的近端压配合到装配孔25中。此外,调节销p5的远端可移动地插入到摆动构件50的调节凹槽55中。即,调节销p5的外径形成为小于调节凹槽55的宽度。当摆动构件50绕作为支点的支撑销p3摆动时,调节销p5相对于调节凹槽55的内部移动。在此,当摆动构件50在打开爪构件30a的方向上摆动时,调节销p5与调节凹槽55的端部接触。因此,摆动构件50在该方向上的进一步摆动得到调节。同样地,当摆动构件50在闭合爪构件30a的相反方向上摆动时,调节销p5与调节凹槽55的另一端接触。因此,摆动构件50在该方向上的进一步摆动得到调节。以这种方式,调节爪构件30a的摆动范围。利用其中由调节销p5和调节凹槽55调节摆动范围的这种结构,即使机器人手1的维修工人在更换爪构件30a时意外地移动摆动构件50,也能够防止蜗杆部分41和蜗轮部分51彼此脱离的故障。在图5a至图5c中所示的摆动构件50的侧表面(该侧表面与形成有调节凹槽55的侧表面52a相对)上形成有类似的调节凹槽,并且摆动构件50的摆动范围由支撑构件20a和该调节凹槽保持的调节销来调节。爪构件30b和30c的摆动范围由相同的构造来调节。调节销p5和调节凹槽55是调节部分的示例。调节销p5是调节突起的示例。调节销p5和该调节销的远端移动到的调节凹槽55不需要设置在摆动构件50的两个侧表面(侧表面52a和与侧表面52a相对的侧表面)上,并且可以设置在侧表面中的一个上。
31.另外,如图2和图3中所示,支撑构件20a和20b中的每一者通过螺钉t固定到支架10。支架10形成为暴露螺钉t的头部。因此,通过拆卸螺钉t并通过从支架10拆卸支撑构件20a和20b,能够容易地从支架10拆卸摆动构件50。摆动构件50的更换可作业性得到改善。例如,当蜗轮部分51磨损时,可能需要更换摆动构件50,上述构造在这种情况下是有效的。这同样适用于对应于其他爪构件30b和30c的支撑构件。螺钉t是第二固定构件的示例。
32.蜗杆部分41和蜗轮部分51以滑动接触的方式旋转,与一般正齿轮的啮合不同。因此,一般来说,考虑到滑动的便利性等,输出侧的齿轮的金属材料比输入侧的齿轮的金属材料软。因此,输出侧的齿轮比输入侧的齿轮更可能磨损。由于在本实施方式中如上所述,输出侧的蜗轮部分51易于更换,因此即使蜗轮部分51由比蜗杆部分41更软的材料制成使得蜗轮部分51被磨损,也能够容易地更换蜗轮部分51。摆动构件50的高更换可作业性意味着生
产中的高组装可作业性,并且组装过程减少,这有助于降低生产成本。
33.如上所述,由于支撑构件20a和20b通过头部暴露的螺钉t固定到支架10,因此摆动构件50的更换可作业性和组装可作业性都高。当摆动构件50组装到机器人手1时,这有利于进行调节。诸如蜗杆部分41和蜗轮部分51的齿轮构件的光洁度以及支架10的尺寸等存在变化,这也导致每个齿轮的中心之间的距离变化。如果考虑到这些变化设计机器人手1,则摆动构件50的侧隙就会变大。另一方面,为了提高机器人手1的爪构件30a至30c的位置精度,要求摆动构件的侧隙尽可能小。为了解决这样的矛盾,将垫片夹在支撑构件20a和20b与支架10之间,并调节支撑构件20a和20b在径向方向上距中心轴线a1的距离,从而减小摆动构件50(蜗杆部分41和蜗轮部分51)的侧隙,并提高机器人手1的组装精度。
34.图6是用于示出垫片的示例的局部立体图,并且主要示出了支撑构件20a和20b、摆动构件50、爪构件30a、螺钉t以及垫片21,其他部分被省略。此外,支撑构件20a和20b被透明地示出。在图6之前的附图中,为了简化说明,为支撑构件20a和20b中的每一者设置一个螺钉t,但在图6中,设置两个螺钉t。支撑构件20a和20b通过螺钉t固定到支架10(图6中未示出),但在图6中,与支架10接触的一侧是上侧。垫片21是薄的金属板,并具有两个孔,螺钉t穿过该孔。在图6中,作为用于阐明垫片21存在的示例,在支撑构件20b的一侧只设置一个垫片21,并且在支撑构件20a的一侧没有设置垫片21。实际上,可以分层设置多个垫片以用于调节,垫片的数量在支撑构件20a侧和支撑构件20b侧之间可以不同,或者在支撑构件20a侧和支撑构件20b侧的垫片数量可以相同。在生产组装和更换摆动构件50时,基于本发明的特征,即支撑构件20a和20b通过头部暴露的螺钉t固定到支架10,能够容易地实现这种调节。
35.如上所述,摆动构件50具有基本上扇形形状(具有预定厚度),形成了在厚度方向上穿透的中心孔53,并且蜗轮部分51形成在绕中心孔53形成为弧形形状的部分处。表面56在绕中心孔53的外周方向上形成在蜗轮部分51上,并且突出部分57形成在表面56上并与形成在爪构件30a的近端部分处的凹部接合。在从中心轴线a1观察时,爪构件30a的近端部分位于蜗杆部分41和蜗轮部分51彼此接合所在的部分的径向外周侧,即,在基本上圆柱形的支架10的侧表面的外边缘附近。由于盘状盖60设置在支架10的远端侧,因此蜗杆部分41和蜗轮部分51彼此接合所在的部分不暴露于待抓取对象。这防止施加到蜗杆的润滑剂和由啮合的磨损产生的金属粉末直接散落到待抓取对象。
36.一般来说,机器人手经常从正上方执行抓取放置在桌子上的待抓取对象的操作。因此,需要注意从机器人手到待抓取对象的不必要的污染,优选是防止机器人手内的污染物通过机器人手的远端侧的间隙到达待抓取对象。如在本实施方式中,爪构件30a至30c的近端部分位于机器人手1的支架10的侧表面的外边缘附近,这用简单的盖覆盖机器人手1的远端侧,从而防止机器人手1内的污染物到达待抓取对象。在将旋转轴40形成为中空轴形状的情况下,盖60形成有用于利用通孔43实现多功能的开口61,该结构不会泄漏机器人手1内的污染物。此外,由于该结构不会泄漏机器人手1内的污染物,因此它还具有减少灰尘从机器人手1的外部侵入的功能。防止异物进入蜗杆部分41和蜗轮部分51之间的啮合部分,这提高机器人手1的耐久性。
37.如在本实施方式中,机器人手1使用三个爪构件30a至30c的情况下,蜗杆部分41的螺纹数可以是三的倍数。当蜗杆部分41的螺纹数为1时,与爪构件30a至30c结合的蜗轮部分51要求齿的相位相对不同相差120度。即,需要三种类型的蜗轮部分51。另一方面,当蜗杆部
分41的螺纹数是三的倍数时,与上述爪构件30a至30c结合的蜗轮部分51都具有相同的形状。因此,蜗轮部分51的形状是统一的,以降低成本,这就产生了次级效果,如消除组装时的作业错误。此外,出于同样的原因,在使用两个爪构件的机器人手的情况下,蜗杆部分41的螺纹数可以是2的倍数。此外,为了使使用三个爪构件的机器人手和使用两个爪构件的机器人手之间的旋转轴40是通用的,蜗杆部分41的螺纹数可以是6的倍数。即,当设置m(m是2或更大的整数)对的爪构件和摆动构件时,蜗杆部分的螺纹数可以是m的倍数。
38.在以上实施方式中,调节凹槽55形成在进行摆动的摆动构件50上,并且调节销p5固定到不摆动的支撑构件20b,但本发明不限于此。例如,调节销p5可以固定在摆动构件50的侧表面52a上径向远离中心孔53的位置处,并且可以在支撑构件20b的面向侧表面52a的表面上设置调节凹槽,以调节可在调节凹槽内移动的调节销p5的移动范围。以这样的方式,只要不妨碍摆动构件50的更换以及机器人手1的组装,就能够颠倒调节销p5与调节凹槽之间的关系。
39.在以上实施方式中,爪构件30a和摆动构件50是分离的,但也可以是一体形成的。在这种情况下,上述“m(m是2或更大的整数)对的爪构件和摆动构件”意味着“摆动构件与m(m是2或更大的整数)个爪构件集成”。这同样适用于爪构件30b和30c。支撑构件20a和20b与支架10分离,但不限于此,只要不妨碍摆动构件50的更换和机器人手1的组装,支撑构件20a和20b中的一者就可以与支架10集成。在这种情况下,上述垫片21用于未与支架10集成的支撑构件的调节。
40.另外,与使用凸轮或凸轮从动件驱动爪构件的类型的机器人手相比,以上实施方式中的机器人手1不需要像凸轮或凸轮从动件那样进行特殊设计,使用比以前更具有知识积累且在世界范围内广泛使用的技术的蜗杆部分41和蜗轮部分51,从而实现了成本的降低。此外,与使用凸轮或凸轮从动件的情况相比,承重能力和耐久性得到了提高。
41.虽然已经详细说明了本发明的示例性实施方式,但本发明并不限于上述实施方式,在不脱离本发明的范围的情况下,可以做出其他实施方式、变型和修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1