把持工具、把持系统、打滑检测装置、打滑检测程序及打滑检测方法
1.本发明涉及把持工具、把持系统、打滑检测装置、打滑检测程序及打滑检测方法。更详细地讲,本发明涉及医疗用的钳子、机械手、夹子等把持工具、具有该把持工具的把持系统、检测由把持工具抓住的对象物的打滑的装置、程序及方法。
背景技术:
2.作为低侵袭手术的一种,已知有内视镜手术。内视镜手术在仅能得到显示于监视器上的限定性的视觉信息的艰难的状况下进行。所以,尝试了在内视镜上安装传感器并将体内的信息向医生提示。例如,在专利文献1中,公开了通过安装在内视镜的前端的压力传感器测量体内的气压。
3.此外,由于由内视镜手术处置的人的内脏容易打滑,所以对于用钳子将内脏抓住以使其不滑落,需要手术者的熟练。并不限于钳子,在机械手、夹子等其他的把持工具中,将容易打滑的对象物抓住的情形也较多。
4.关于在机械手将对象物抓住时发生的打滑,在非专利文献1中,公开了根据重叠安装在把持部上的三轴力觉传感器测量的三轴方向的力和静摩擦系数来预测打滑的发生。
5.现有技术文献
6.专利文献
7.专利文献1:国际公开第2018/061705号公报
8.非专利文献
9.非专利文献1:a mems slip sensor:estimations of triaxial force and coefficient of static friction for prediction of a slip,taiyu okatani;akihito nakai;tomoyuki takahata;isao shimoyama,digest of technical papers of19th international conference on solid-state sensors,actuators and microsystems(transducers2017),doi:10.1109/transducers.2017.7993991,pp.75-77,2017.
技术实现要素:
10.发明要解决的课题
11.但是,非专利文献1的技术不能检测对象物的打滑本身。此外,人的内脏大多数处于被体液等润滑膜覆盖的低摩擦状态。进而,人的消化器官壁通常分为四层,特别在粘膜层与肌肉层之间容易发生打滑。难以基于摩擦力来判断内脏那样容易打滑的对象物的打滑。
12.本发明鉴于上述情况,目的是提供一种能够检测对象物的打滑的把持工具、具有该把持工具的把持系统、检测由把持工具抓住的对象物的打滑的装置、程序及方法。
13.用来解决课题的手段
14.(把持工具)
15.第1技术方案的把持工具,其特征在于,具备:一对把持部,将对象物夹着而抓住;
开闭机构,将上述一对把持部开闭;以及至少1个传感器单元,设在上述一对把持部的一方或两者上;上述传感器单元具有以规定的分布配置的多个力觉传感器;上述多个力觉传感器分别具有测量从上述对象物受到的3轴方向的力的功能。
16.(把持系统)
17.第2技术方案的把持系统,其特征在于,具备:第1技术方案所述的把持工具;以及打滑检测装置,基于由上述传感器单元测量的载荷分布,检测上述对象物的打滑;上述载荷分布是将3轴方向的力合成而得到的合成载荷的分布。
18.第3技术方案的把持系统在第2技术方案中,其特征在于,上述打滑检测装置求出上述载荷分布的中心位置;基于上述中心位置随时间的变化,检测上述对象物的打滑。
19.第4技术方案的把持系统在第2技术方案中,其特征在于,上述打滑检测装置求出上述载荷分布的峰值位置;基于上述峰值位置随时间的变化,检测上述对象物的打滑。
20.第5技术方案的把持系统在第2技术方案中,其特征在于,上述打滑检测装置基于上述载荷分布的平行移动,检测上述对象物的打滑。
21.第6技术方案的把持系统,其特征在于,具备:第1技术方案所述的把持工具;以及打滑检测装置,根据由上述传感器单元测量的垂直载荷测量值及摩擦力测量值,求出上述对象物的静摩擦系数。
22.第7技术方案的把持系统,其特征在于,具备:第1技术方案所述的把持工具;以及打滑检测装置,被输入由上述传感器单元测量的垂直载荷测量值及摩擦力测量值;上述打滑检测装置根据预先存储的上述对象物的静摩擦系数和上述垂直载荷测量值,求出最大静摩擦力;基于上述摩擦力测量值与上述最大静摩擦力的关系,预测上述对象物的打滑开始。
23.(打滑检测装置)
24.第8技术方案的打滑检测装置,其特征在于,基于由第1技术方案所述的把持工具的上述传感器单元测量的载荷分布,检测上述对象物的打滑;上述载荷分布是将3轴方向的力合成而得到的合成载荷的分布。
25.第9技术方案的打滑检测装置在第8技术方案中,其特征在于,求出上述载荷分布的中心位置;基于上述中心位置随时间的变化,检测上述对象物的打滑。
26.第10技术方案的打滑检测装置在第8技术方案中,其特征在于,求出上述载荷分布的峰值位置;基于上述峰值位置随时间的变化,检测上述对象物的打滑。
27.第11技术方案的打滑检测装置在第8技术方案中,其特征在于,基于上述载荷分布的平行移动,检测上述对象物的打滑。
28.第12技术方案的打滑检测装置,其特征在于,基于由第1技术方案所述的把持工具的上述传感器单元测量的垂直载荷测量值及摩擦力测量值,求出上述对象物的摩擦系数。
29.第13技术方案的打滑检测装置,被输入由第1技术方案所述的把持工具的上述传感器单元测量的垂直载荷测量值及摩擦力测量值,其特征在于,根据预先存储的上述对象物的静摩擦系数和上述垂直载荷测量值,求出最大静摩擦力;基于上述摩擦力测量值与上述最大静摩擦力的关系,预测上述对象物的打滑开始。
30.(打滑检测程序)
31.第14技术方案的打滑检测程序,其特征在于,使计算机发挥功能,以使其基于由第1技术方案所述的把持工具的上述传感器单元测量的载荷分布,检测上述对象物的打滑;上
述载荷分布是将3轴方向的力合成而得到的合成载荷的分布。
32.第15技术方案的打滑检测程序在第14技术方案中,其特征在于,使计算机发挥功能,以使其求出上述载荷分布的中心位置;基于上述中心位置随时间的变化,检测上述对象物的打滑。
33.第16技术方案的打滑检测程序在第14技术方案中,其特征在于,使计算机发挥功能,以使其求出上述载荷分布的峰值位置;基于上述峰值位置随时间的变化,检测上述对象物的打滑。
34.第17技术方案的打滑检测程序在第14技术方案中,其特征在于,使计算机发挥功能,以使其基于上述载荷分布的平行移动,检测上述对象物的打滑。
35.第18技术方案的打滑检测程序,其特征在于,使计算机发挥功能,以使其根据由第1技术方案所述的把持工具的上述传感器单元测量的垂直载荷测量值及摩擦力测量值,求出上述对象物的摩擦系数。
36.第19技术方案的打滑检测程序,其特征在于,使计算机发挥功能,以使其取得由第1技术方案所述的把持工具的上述传感器单元测量的垂直载荷测量值及摩擦力测量值;根据预先存储的上述对象物的静摩擦系数和上述垂直载荷测量值,求出最大静摩擦力;基于上述摩擦力测量值与上述最大静摩擦力的关系,预测上述对象物的打滑开始。
37.(打滑检测方法)
38.第20技术方案的打滑检测方法,其特征在于,基于由第1技术方案所述的把持工具的上述传感器单元测量的载荷分布,检测上述对象物的打滑;上述载荷分布是将3轴方向的力合成而得到的合成载荷的分布。
39.第21技术方案的打滑检测方法在第20技术方案中,其特征在于,求出上述载荷分布的中心位置;基于上述中心位置随时间的变化,检测上述对象物的打滑。
40.第22技术方案的打滑检测方法在第20技术方案中,其特征在于,求出上述载荷分布的峰值位置;基于上述峰值位置随时间的变化,检测上述对象物的打滑。
41.第23技术方案的打滑检测方法在第20技术方案中,其特征在于,基于上述载荷分布的平行移动,检测上述对象物的打滑。
42.第24技术方案的打滑检测方法,其特征在于,根据由第1技术方案所述的把持工具的上述传感器单元测量的垂直载荷测量值及摩擦力测量值,求出上述对象物的摩擦系数。
43.第25技术方案的打滑检测方法,其特征在于,取得由第1技术方案所述的把持工具的上述传感器单元测量的垂直载荷测量值及摩擦力测量值;根据预先存储的上述对象物的静摩擦系数和上述垂直载荷测量值,求出最大静摩擦力;基于上述摩擦力测量值与上述最大静摩擦力的关系,预测上述对象物的打滑开始。
44.[发明效果]
[0045]
(把持工具)
[0046]
根据第1技术方案,能够由传感器单元测量从对象物受到的载荷分布。基于该载荷分布,能够检测对象物的打滑。
[0047]
(把持系统)
[0048]
根据第2~第5技术方案,由于基于载荷分布检测对象物的打滑,所以即使是难以发生摩擦的容易打滑的对象物,也能够检测打滑。
[0049]
根据第6技术方案,通过求出对象物的摩擦系数,能够评价对象物的打滑容易度。
[0050]
根据第7技术方案,通过使对象物的打滑开始的预测反映到把持工具的动作中,能够不使对象物打滑而将其维持。
[0051]
(打滑检测装置)
[0052]
根据第8~第11技术方案,由于基于载荷分布检测对象物的打滑,所以即使是难以发生摩擦的容易打滑的对象物,也能够检测打滑。
[0053]
根据第12技术方案,通过求出对象物的摩擦系数,能够评价对象物的打滑容易度。
[0054]
根据第13技术方案,通过使对象物的打滑开始的预测反映到把持工具的动作中,能够不使对象物打滑而将其维持。
[0055]
(打滑检测程序)
[0056]
根据第14~第17技术方案,由于基于载荷分布检测对象物的打滑,所以即使是难以发生摩擦的容易打滑的对象物,也能够检测打滑。
[0057]
根据第18技术方案,通过求出对象物的摩擦系数,能够评价对象物的打滑容易度。
[0058]
根据第19技术方案,通过使对象物的打滑开始的预测反映到把持工具的动作中,能够不使对象物打滑而将其维持。
[0059]
(打滑检测方法)
[0060]
根据第20~第23技术方案,由于基于载荷分布检测对象物的打滑,所以即使是难以发生摩擦的容易打滑的对象物,也能够检测打滑。
[0061]
根据第24技术方案,通过求出对象物的摩擦系数,能够评价对象物的打滑容易度。
[0062]
根据第25技术方案,通过使对象物的打滑开始的预测反映到把持工具的动作中,能够不使对象物打滑而将其维持。
附图说明
[0063]
图1是有关第1实施方式的把持系统的说明图。
[0064]
图2是第1实施方式的把持工具的侧视图。
[0065]
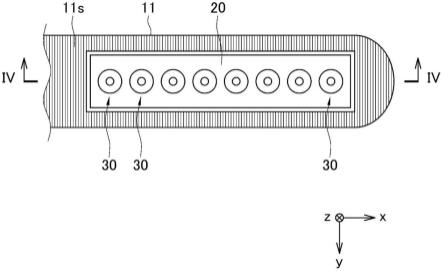
图3是第1实施方式的把持部的俯视图。
[0066]
图4是图3的iv-iv线向视剖视图。
[0067]
图5是第1实施方式的力觉传感器的俯视图。
[0068]
图6(a)是图5的via-via线向视剖视图。图6(b)是作用有外力的状态的力觉传感器的纵剖视图。
[0069]
图7是应变检测电路的电路图。
[0070]
图8(a)是把持部将对象物牢牢地抓住的状态的侧视图及载荷分布。图8(b)是内层打滑的状态的侧视图及载荷分布。图8(c)是内层进一步打滑的状态的侧视图及载荷分布。
[0071]
图9是载荷分布的中心位置的求出方式的说明图。
[0072]
图10是第2实施方式的把持工具的侧视图。
[0073]
图11(a)是把持部将对象物抓住的状态的侧视图及载荷分布。图11(b)是对象物打滑的状态的侧视图及载荷分布。
[0074]
图12(a)是把持部将对象物抓住的状态的侧视图及载荷分布。图12(b)是对象物打滑的状态的侧视图及载荷分布。
[0075]
图13是第3实施方式的把持部的俯视图。
[0076]
图14是第3实施方式的力觉传感器的俯视图。
[0077]
图15(a)是图14的xva-xva线向视剖视图。图15(b)是作用有外力的状态的力觉传感器的纵剖视图。
[0078]
图16是应变检测电路的电路图。
[0079]
图17是传感器单元的相片。
[0080]
图18(a)是将凝胶体用钳子的把持部整体抓住的状态的相片及载荷分布。图18(b)是凝胶体移动了5mm的状态的相片及载荷分布。图18(c)是凝胶体移动了10mm的状态的相片及载荷分布。
[0081]
图19(a)是从把持双层体起4.5秒后的状态的相片及载荷分布。图19(b)是从把持双层体起8.2秒后的状态的相片及载荷分布。图19(c)是从把持双层体起16.1秒后的状态的相片及载荷分布。
[0082]
图20是表示载荷分布的中心位置随时间的变化的曲线图。
具体实施方式
[0083]
接着,基于附图说明本发明的实施方式。
[0084]
〔第1实施方式〕
[0085]
(把持系统)
[0086]
如图1所示,有关本发明的第1实施方式的把持系统gs具有把持工具aa和打滑检测装置sd。
[0087]
把持工具aa是把持对象物的器具。作为把持工具aa,例如可以举出医疗用的钳子、机械手、夹子等。在钳子中,除了以其单独使用以外,也有与内视镜组合使用、组装到手术用机器人上的情况等。此外,把持工具aa也可以组装到工业用、家庭用等的机器人的机械手臂上。进而,把持工具aa也可以是作为工具等使用的夹子。在图1中,作为把持工具aa而表示了钳子的例子。
[0088]
如后述那样,把持工具aa具有传感器单元20。打滑检测装置sd基于由传感器单元20得到的数据,检测由把持工具aa抓住的对象物的打滑。打滑检测装置sd是由cpu、存储器等构成的计算机。通过在计算机中安装打滑检测程序,实现作为打滑检测装置sd的功能。打滑检测程序也可以存储在计算机可读取的存储介质(包括非瞬态性的介质)中。传感器单元20和打滑检测装置sd通过有线或无线连接。由传感器单元20得到的数据被输入到打滑检测装置sd中。
[0089]
(把持工具)
[0090]
如图2所示,把持工具aa具有一对把持部11、11。各把持部11是棒状的部件。一方的把持部11的基端与另一方的把持部11的基端被用销12连结。通过两把持部11、11以销12为中心旋转,把持部11、11开闭。图2中的实线表示把持部11、11打开的状态,单点划线表示把持部11、11关闭的状态。本实施方式的把持工具aa其一对把持部11、11如剪子那样开闭。
[0091]
通过将一对把持部11、11闭合,能够将对象物用把持部11、11夹着而抓住。此外,通过将一对把持部11、11打开,能够将抓住的对象物放开。将各把持部11的与另一方的把持部11对置的面称作把持面11s。当用把持部11、11将对象物抓住时,把持面11s与对象物接触。
为了使与对象物的摩擦变强,也可以在把持面11s上设置凹凸。此外,把持面11s既可以是平面,也可以是曲面。
[0092]
把持工具aa具有将一对把持部11、11开闭的开闭机构。本实施方式的开闭机构主要由手柄13、轴杆14及杆15构成。手柄13是固定手柄13a和可动手柄13b被销连结的剪子型的手柄。在固定手柄13a上固定着中空的轴杆14的基端。由销12将一对把持部11、11连结在轴杆14的前端。在轴杆14的内部插入着杆15。杆15的基端被固定在可动手柄13b上。杆15的前端与一对把持部11、11连结。
[0093]
如果手术者将手柄13握住而开闭,则其开闭动作经由杆15被传递,一对把持部11、11开闭。由此,手术者能够进行把持部11、11的开闭操作。
[0094]
另外,也可以如本实施方式那样做成一对把持部11、11的两者相对于轴杆14旋转的结构。也可以做成将一方的把持部11相对于轴杆14固定、另一方的把持部11现对于轴杆14旋转的结构。
[0095]
(传感器单元)
[0096]
如图3及图4所示,在把持部11上设有传感器单元20。如果用把持部11、11将对象物抓住,则传感器单元20与对象物接触。也可以在一对把持部11、11的一方上设置1个传感器单元20。也可以在一对把持部11、11的两者上各设置1个传感器单元20。
[0097]
如图3及图4所示,定义x轴、y轴及z轴。x轴在从把持部11的基端朝向前端的方向上延伸。y轴相对于x轴垂直,在把持部11的宽度方向上延伸。z轴相对于x轴及y轴垂直,沿着相对于把持面11s垂直的方向延伸。
[0098]
传感器单元20是俯视长方形的板状的部件。将传感器单元20的一方的主面称作感测面。传感器单元20以感测面与把持面11s为同面的方式被固定在把持部11的内部。另外,传感器单元20的感测面优选的是平面。在把持面11s为曲面的情况下,也可以将感测面做成沿着把持面11s的曲面。
[0099]
传感器单元20具有以规定的分布配置的多个力觉传感器30。本实施方式的传感器单元20沿着x轴排列为一列而以直线状配置有8个力觉传感器30。力觉传感器30优选的是以等间隔配置,但也可以以不等间隔配置。此外,力觉传感器30的数量并不限定于8个。传感器单元20只要具有2个以上的力觉传感器30即可。
[0100]
(力觉传感器)
[0101]
各力觉传感器30具有测量从对象物受到的力的功能。本实施方式的力觉传感器30具有测量3轴方向的力的功能。这里,3轴方向的力由在相对于感测面垂直的方向(z轴方向)上作用的法线力和在与感测面平行的两方向(x轴方向及y轴方向)上作用的切线力构成。力觉传感器30的结构没有被特别限定,例如只要做成以下说明的结构即可。
[0102]
如图5及图6(a)所示,力觉传感器30具有框架31和触头32。触头32配置在形成于框架31的空间部中。触头32被配置为十字的4个梁33支承在框架31上。在框架31与触头32之间,设有触头32可摆动的间隙。
[0103]
框架31的上表面及触头32的上端面构成感测面。触头32的上端面只要设为与框架31的上表面相同的高度即可。此外,也可以使触头32的上端面比框架31的上表面向上方突出,也可以埋设在下方。
[0104]
力觉传感器30的尺寸没有被特别限定,例如是俯视0.5~5mm四方形。此外,力觉传
感器30的厚度例如是100μm~1mm。梁33的厚度例如是10~30μm。
[0105]
如图6(b)所示,如果对象物o接触在力觉传感器30的感测面上,则通过从对象物o受到的力,触头32向下方(z轴方向)沉陷。随之,梁33挠曲。此外,如果从对象物o受到的力的方向相对于z轴方向倾斜,则触头32相对于z轴方向倾斜。
[0106]
通过触头32的垂直变位及倾斜而在梁33中发生应变。为了检测梁33的应变,在梁33上设有5个应变检测元件34、36a、36b、37a、37b。应变检测元件34、36a、36b、37a、37b例如是压电电阻元件。
[0107]
应变检测元件34被用于检测触头32的垂直变位。以下,将应变检测元件34称作z轴应变检测元件34。在力觉传感器30中设有与z轴应变检测元件34组合使用的基准电阻35。基准电阻35设在不受梁33的挠曲的影响的位置、例如触头32的下表面上。
[0108]
应变检测元件36a、36b沿着x轴配置在夹着触头32的位置。以下,将应变检测元件36a、36b称作x轴应变检测元件36a、36b。应变检测元件37a、37b沿着y轴配置在隔着触头32的位置。以下,将应变检测元件37a、37b称作y轴应变检测元件37a、37b。
[0109]
力觉传感器30具有检测梁33的应变的应变检测电路。如图7所示,应变检测电路将z轴应变检测元件34与基准电阻35串联地连接,在两端施加电压vdd,输出z轴应变检测元件34与基准电阻35之间的电压vz。电压vz根据z轴应变检测元件34的电阻的变化而变化。因此,通过读取电压vz,能够检测梁33的z轴方向的应变。由此,能够检测触头32的垂直方向(z轴方向)的变位。此外,由于梁33的弹性率是已知的,所以根据触头32的垂直方向的变位,能够检测触头32从对象物受到的z轴方向的力即法线力。
[0110]
此外,应变检测电路将x轴应变检测元件36a、36b串联地连接,在两端施加电压vdd,输出x轴应变检测元件36a和36b之间的电压vx。电压vx根据x轴应变检测元件36a、36b的差动而变化。因此,通过读取电压vx,能够检测梁33的x轴方向的应变。由此,能够检测触头32的x轴方向的倾斜。此外,由于梁33的弹性率是已知的,所以根据触头32的x轴方向的倾斜,能够测量触头32从对象物受到的x轴方向的切线力。
[0111]
同样,应变检测电路将y轴应变检测元件37a、37b串联地连接,在两端施加电压vdd,输出y轴应变检测元件37a和37b之间的电压vy。电压vy根据y轴应变检测元件37a、37b的差动而变化。因此,通过读取电压vy,能够检测梁33的y轴方向的应变。由此,能够检测触头32的y轴方向的倾斜。此外,由于梁33的弹性率是已知的,所以根据触头32的y轴方向的倾斜,能够测量触头32从对象物受到的y轴方向的切线力。
[0112]
力觉传感器30可以通过使用半导体微切削加工技术将soi基板等半导体基板加工而形成。其次序例如是以下这样的。首先,在soi基板的活性层上通过杂质扩散、离子注入等的方法形成压电电阻元件等。接着,通过铝溅镀等形成金属配线,构成应变检测电路。然后,通过deep-rie将支承基板蚀刻,形成框架31与触头32之间的空间部。梁33由残留的活性层及中间氧化膜形成。
[0113]
另外,力觉传感器30的制造方法并不限定于半导体微切削加工技术。例如,也可以作为原材料而使用金属应变计、不锈钢制隔膜等,也可以采用3d打印机的造形技术等。
[0114]
(打滑检测)
[0115]
如上述那样,力觉传感器30具有测量从对象物受到的力的功能。此外,在传感器单元20中以规定的分布配置有多个力觉传感器30。因此,传感器单元20能够测量从对象物受
到的载荷的分布。
[0116]
这里,力觉传感器30从对象物受到的力的方向并不一定相对于感测面总是垂直。例如,在把持工具aa的把持面11s是曲面的情况、对象物的表面为曲面的情况、对象物具有柔性的情况、对象物的组成不均匀而硬度根据位置而不同的情况下等,有力的方向相对于z轴方向倾斜的情况。在这样的情况下,仅根据法线力(z轴方向的力)不能正确地求出从对象物受到的力的大小。
[0117]
本实施方式的力觉传感器30能够测量3轴方向的力。通过将3轴方向的力合成,能够得到合成载荷。另外,合成载荷通过以下的式(1)求出。
[0118]
[数式1]
[0119][0120]
这里,f是合成载荷,f
x
是x轴方向的力,fy是y轴方向的力,fz是z轴方向的力。
[0121]
合成载荷成为正确地表示从对象物受到的载荷的大小的值。通过作为载荷分布而使用合成载荷的分布,能够精度良好地检测对象物的打滑。以下,在本实施方式中,载荷分布是指合成载荷的分布。
[0122]
在打滑检测装置sd中被输入由传感器单元20测量的载荷分布。打滑检测装置sd基于载荷分布,检测对象物的打滑。以下,说明其次序。
[0123]
■
打滑检测方法1
[0124]
如图8(a)、图8(b)、图8(c)所示,作为对象物o,设有如消化器官壁那样具有外层o1和内层o2的结构。这种对象物o在外层o1与内层o2之间容易发生打滑。图8(a)、图8(b)、图8(c)依次表示内层o2打滑的状况。此外,图8(a)、图8(b)、图8(c)还表示在各状态下由传感器单元20测量的载荷分布。
[0125]
如图8(a)所示,在把持部11、11将对象物o牢牢地抓住的状态下,把持部11从对象物o受到的载荷分布在把持部11的基端附近具有峰值。如图8(b)所示,如果内层o2相对于外层o1开始打滑,则载荷分布的峰值移动到中央附近。并且,如图8(c)所示,如果内层o2进一步打滑而移动,则载荷分布的峰值移动到把持部11的前端附近。这样,伴随着内层o2的打滑,载荷分布的峰值从把持部11的基端朝向前端移动。利用该特性来检测对象物o的打滑。
[0126]
载荷分布的中心位置根据力矩的平衡,通过以下的式(2)求出。
[0127]
[数式2]
[0128][0129]
这里,如图9所示,xc是载荷分布的中心位置,xk是把持部11的从基端起第k个力觉传感器30的x坐标,fk是由第k个力觉传感器30测量的合成载荷。
[0130]
另外,在力觉传感器30以间隔a等间隔地排列的情况下,载荷分布的中心位置xc可以用式(3)求出。
[0131]
[数式3]
[0132]
[0133]
打滑检测装置sd基于式(2)或式(3),求出由传感器单元20测量的载荷分布的中心位置xc。并且,打滑检测装置sd基于中心位置xc随时间的变化,检测对象物的打滑。即,打滑检测装置sd在中心位置xc正在移动的情况下,判断为对象物正在打滑。此外,根据中心位置xc的移动速度,能够求出对象物的打滑的速度。相反,打滑检测装置sd在中心位置xc没有移动的情况下,判断为对象物没有打滑(被牢牢地抓住)。
[0134]
■
打滑检测方法2
[0135]
也可以代替载荷分布的中心位置而基于峰值位置来检测对象物的打滑。由传感器单元20测量的合成载荷的测量位置是离散的。所以,只要将由传感器单元20测量的载荷分布用规定的函数拟合并确定峰值即可。此外,也可以将传感器单元20具有的多个力觉传感器30中的合成载荷测量值为最大的力觉传感器30的位置作为峰值位置。
[0136]
打滑检测装置sd如上述那样,求出由传感器单元20测量的载荷分布的峰值位置。并且,打滑检测装置sd基于峰值位置随时间的变化,检测对象物的打滑。即,打滑检测装置sd在峰值位置正在移动的情况下,判断为对象物正在打滑。此外,根据峰值位置的移动速度,能够求出对象物的打滑的速度。相反,打滑检测装置sd在峰值位置没有移动的情况下,判断为对象物没有打滑(被牢牢地抓住)。
[0137]
另外,在图8(a)、图8(b)、图8(c)中,假定了对象物o具有外层o1和内层o2,但即使是不具有这样的构造的简单的构造的对象物,也能够通过上述方法检测打滑。如融化的冰那样表面被润滑剂覆盖的对象物在与把持部11之间几乎不发生摩擦。即使是这样的对象物也能够检测打滑。
[0138]
如以上这样,本实施方式的把持工具aa能够用设在把持部11上的传感器单元20测量从对象物受到的载荷分布。基于该载荷分布,能够检测对象物的打滑。
[0139]
在外层与内层之间发生打滑的对象物,在把持部11与外层之间作用摩擦力,即使在外层没有打滑的情况下,也有内层打滑的情况。此外,表面被润滑剂覆盖的容易打滑的对象物,其在与把持部11之间产生的摩擦力非常弱。因而,难以基于摩擦力来检测这样的对象物的打滑。
[0140]
而本实施方式中,基于载荷分布来检测对象物的打滑。因此,即使是难以发生摩擦的容易打滑的对象物,也能够检测打滑。
[0141]
(摩擦系数测量)
[0142]
也可以在由力觉传感器30测量的3轴方向的力中,将z轴方向的力看作从对象物受到的垂直载荷,将x轴方向及y轴方向的力看作与对象物之间作用的摩擦力。这样,在打滑检测装置sd中,被输入由传感器单元20测量的垂直载荷测量值及摩擦力测量值。打滑检测装置sd根据垂直载荷测量值及摩擦力测量值求出对象物的摩擦系数。其次序是以下这样的。
[0143]
如上述那样,打滑检测装置sd能够检测对象物的打滑。即,打滑检测装置sd能够检测对象物开始打滑的时点。因而,打滑检测装置sd能够确定对象物要开始打滑前的垂直载荷fz及摩擦力f
xy
(0)。这里,摩擦力f
xy
(0)是最大静摩擦力。打滑检测装置sd使用以下的式(4),根据垂直载荷fz及最大静摩擦力f
xy
(0),求出对象物与传感器单元20之间的静摩擦系数μ0。
[0144]
[数式4]
[0145][0146]
此外,打滑检测装置sd能够检测对象物正在打滑的状态。因而,打滑检测装置sd能够确定对象物正在打滑的状态的垂直载荷fz及摩擦力f
xy
。这里,摩擦力f
xy
是动摩擦力。打滑检测装置sd按照以下的式(4),使用垂直载荷fz及动摩擦力f
xy
求出对象物与传感器单元20之间的动摩擦系数μ。
[0147]
[数式5]
[0148][0149]
如以上这样,打滑检测装置sd能够测量对象物的静摩擦系数及动摩擦系数。静摩擦系数及动摩擦系数表示对象物的打滑容易度。因而,打滑检测装置sd能够评价对象物的打滑容易度。
[0150]
(打滑预测)
[0151]
此外,打滑检测装置sd也能够预测对象物的打滑开始。其次序是以下这样的。
[0152]
在打滑检测装置sd中存储有预先测量的对象物的静摩擦系数μ0。打滑检测装置sd基于式(4),根据静摩擦系数μ0和当前的垂直载荷测量值fz,求出最大静摩擦力f
xy
(0)。
[0153]
并且,打滑检测装置sd基于当前的摩擦力测量值f
xy
与最大静摩擦力f
xy
(0)的关系,预测对象物的打滑开始。例如,根据摩擦力f
xy
与最大静摩擦力f
xy
(0)的差、摩擦力f
xy
的增加速度等,在对象物实际开始打滑之前预测打滑开始。
[0154]
只要将对象物的打滑开始的预测反映到把持工具aa的动作中,就能够不使对象物打滑而将其维持。例如,机械手等通过致动器动作。在如果将对象物的打滑开始的预测反映到这种把持工具aa的致动器的控制中,则能够不使对象物打滑而将其维持。
[0155]
另外,在本实施方式中,由于多个力觉传感器30排列为一列而配置,所以能够检测其列方向(x轴方向)的对象物的打滑。多个力觉传感器30被排列的方向并不限定于从把持部11的基端朝向前端的方向(x轴方向)。也可以将多个力觉传感器30在把持部11的宽度方向(y轴方向)上排列,也可以在x-y平面内斜着排列。
[0156]
〔第2实施方式〕
[0157]
接着,说明有关第2实施方式的把持系统gs。
[0158]
如图10所示,把持工具bb也可以是多关节的结构。例如,把持工具bb在基部16设有2个指17、17。各指17由中间部18和把持部11构成。中间部18能够相对于基部16旋转。把持部11能够相对于中间部18旋转。能够将对象物o用指17、17夹着而抓住。在一方的把持部11上设有传感器单元20。
[0159]
在这样的把持工具bb的情况下,存在一对把持部11、11在维持着平行的状态的原状下开闭的情况。在此情况下,也在对象物o的边缘处于传感器单元20的区域内的情况下,与第1实施方式同样,能够基于由传感器单元20测量的载荷分布的中心位置或峰值位置检测对象物o的打滑。
[0160]
如图11(a)、图11(b)所示,假设在对象物o的内部中有硬疙瘩等的比周围硬的硬质部分o3。在此情况下,由传感器单元20测量的载荷分布,硬质部分o3存在的区域的合成载荷比其他区域高。在这样的对象物o打滑的情况下,合成载荷较高的区域也随着硬质部分o3的
移动而移动。
[0161]
例如,如图11(a)所示,在硬质部分o3存在于把持部11的基端附近的情况下,载荷分布比把持部11的基端附近的区域高。如图11(b)所示,在对象物o打滑而硬质部分o3移动到把持部11的前端附近的情况下,载荷分布中,把持部11的基端附近的区域变高。在这样的情况下,与第1实施方式同样,能够基于由传感器单元20测量的载荷分布的中心位置或峰值位置来检测对象物o的打滑。
[0162]
如图12(a)、图12(b)所示,在对象物o具有某种程度的硬度的情况下,由传感器单元20测量的载荷分布反映了对象物o的表面形状。即,对象物o的表面中的突出到外方的部分其合成载荷变高,向内侧凹陷的部分其合成载荷变低。
[0163]
因而,在对象物o从图12(a)所示的状态打滑而移动到图12(b)所示的状态的情况下,在载荷分布维持其形状的原状下,对象物o在打滑的方向上平行移动。在这样的情况下,打滑检测装置sd能够基于载荷分布的平行移动检测对象物o的打滑。
[0164]
〔第3实施方式〕
[0165]
接着,说明有关第3实施方式的把持系统gs。
[0166]
如图13所示,也可以将构成传感器单元20的多个力觉传感器30配置为以平面状分布。力觉传感器30的配置既可以是正方格状,也可以是矩形格状,也可以是三角格状。
[0167]
这样,如果将多个力觉传感器30以平面状分布而配置,则能够检测二维方向的对象物的打滑。即,除了对象物的x轴方向的打滑以外,还能够检测y轴方向的打滑。
[0168]
另外,也可以将构成传感器单元20的多个力觉传感器30配置为十字或t字形。这样,也能够检测二维方向的对象物的打滑。
[0169]
〔第4实施方式〕
[0170]
接着,说明有关第4实施方式的把持系统gs。
[0171]
力觉传感器30也可以仅测量从对象物受到的法线力(z轴方向的力)。其结构没有被特别限定,例如只要做成以下说明的结构即可。
[0172]
如图14及图15(a)所示,本实施方式的力觉传感器30主要具有框架31、触头32及隔膜38。框架31具有圆柱状的空间部。该空间部的下侧开口部被隔膜38封闭。在隔膜38的中央立设有圆柱状的触头32。即,在框架31具有的圆柱状的空间部的中央设有触头32。隔膜38的厚度例如是10~30μm。
[0173]
如图15(b)所示,如果对象物o接触在力觉传感器30的感测面上,则通过从对象物o受到的载荷而触头32向下方(z轴方向)沉陷。随之,隔膜38挠曲。为了检测此时发生的隔膜38的应变,在隔膜38上设有z轴应变检测元件34。在力觉传感器30中,设有与z轴应变检测元件34组合使用的基准电阻35。基准电阻35设在不受隔膜38的挠曲的影响的位置、例如设置框架31的下表面。
[0174]
力觉传感器30具有检测隔膜38的应变的应变检测电路。如图16所示,应变检测电路将z轴应变检测元件34和基准电阻35串联地连接,在两端施加电压vdd,输出z轴应变检测元件34与基准电阻35之间的电压vz。电压vz根据z轴应变检测元件34的电阻的变化而变化。因此,通过读取电压vz,能够检测隔膜38的z轴方向的应变。由此,能够检测触头32的垂直方向(z轴方向)的变位。此外,由于隔膜38的弹性率是已知的,所以根据触头32的垂直方向的变位,能够测量触头32从对象物受到的法线力。
[0175]
即使力觉传感器30仅测量法线力,也能够进行打滑检测。即,在第1、第2实施方式中,只要代替合成载荷而使用垂直载荷(法线力)即可。在此情况下,载荷分布是指垂直载荷的分布。
[0176]
[实施例]
[0177]
接着,说明实施例。
[0178]
(传感器单元的制作)
[0179]
将支承基板厚度为475μm、活性层厚度为20μm的n型soi晶片加工,制作出传感器单元。对于晶片的活性层,以通过n
+
型扩散区域进行的基板接触区域的形成、绝缘氧化膜、用于压电电阻的p型扩散层的形成、通过铝配线进行的电极形成的顺序,实施制作工艺,形成用于力觉检测的感测集成电路。压电电阻部以杂质浓度为3
×
10
-12
cm
-2
进行离子注入后,通过1000℃的热退火而形成。在电路部的形成后,通过deep-rie进行触头构造形成。触头被隔膜构造机械性地支承。由soi活性层形成的膜部分决定机械特性。由于压电电阻形成在隔膜上,所以能够将触头的变位作为应力变化而进行信号检测。
[0180]
在图17中表示完成的传感器单元的相片。传感器单元具有8个力觉传感器排列为一列的结构。各力觉传感器的尺寸是1mm四方形。将该传感器单元安装在钳子的把持部上。
[0181]
(凝胶体的把持)
[0182]
使用安装有传感器单元的钳子,把持凝胶状的对象物。在图18(a)中表示将凝胶体用钳子的把持部整体抓住的状态。将其设为初始把持位置。在图18(b)中表示凝胶体从初始把持位置移动了5mm的状态。在图18(c)中表示凝胶体从初始把持位置移动了10mm的状态。
[0183]
可知随着凝胶体朝向把持部的前端移动,载荷分布的峰值位置也朝向把持部的前端移动。由此,确认了能够基于载荷分布的中心位置或峰值位置来检测对象物的打滑。
[0184]
(双层体的把持)
[0185]
将模拟内脏用聚乙烯膜包裹,制作出由外层(聚乙烯膜)和内层(模拟内脏)构成的双层体。使用安装有传感器单元的钳子,把持制作出的双层体。在图19(a)中表示用钳子将双层体把持起4.5秒后的状态。在图19(b)中表示用钳子将双层体把持起8.2秒后的状态。在图19(c)中表示用钳子将双层体把持起16.1秒后的状态。
[0186]
如果用钳子将双层体抓住,则在内层与外层之间发生打滑,仅内层朝向把持部的前端移动。随之,载荷分布的峰值位置也朝向把持部的前端移动。
[0187]
在图20中表示分布载荷的中心位置随时间的变化。分布载荷的中心位置随着时间的经过(内层的打滑)而移动。由此,确认了能够基于分布载荷的中心位置随时间的变化来检测对象物的打滑。
[0188]
标号说明
[0189]
gs 把持系统
[0190]
aa 把持工具
[0191]
11 把持部
[0192]
20 传感器单元
[0193]
30 力觉传感器
[0194]
sd 打滑检测装置
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1