用于调整机器人系统的方法和装置与流程
本公开的示例性实施例,一般涉及机器人系统;更具体地,涉及用于调整机器人系统的方法、装置、系统和计算机可读介质使得机器人系统可以以更有效的方式运行。
背景技术:
1、随着计算机和自动控制的发展,机器人系统在制造业中被广泛用于处理各种类型的物体。例如,可以在机器人系统的端臂处装备用于切割、抓取和其它操作的工具。视觉引导的运动提供了自动化中的重要技术方案,这提高了机器人系统的灵活性和准确性。然而,为了在机器人系统中实现高性能控制器,工程师需要花费大量时间和精力来调整控制参数(例如时间延迟和其它参数)。特别地,与机器人系统的高速移动相比,一些机器人系统中的视觉处理相对较慢,并且低反馈频率使得机器人系统不能实现高效率。
2、已经提出了几种用于调整机器人系统的技术方案。然而,这些技术方案需要关于机器人系统中的控制参数的丰富知识,并且没有经验的工程师难以独立地调整机器人系统。因此,期望提出用于调整机器人系统的更自动的方式。
技术实现思路
1、本公开的示例性实施例提供了用于调整机器人系统的技术方案。
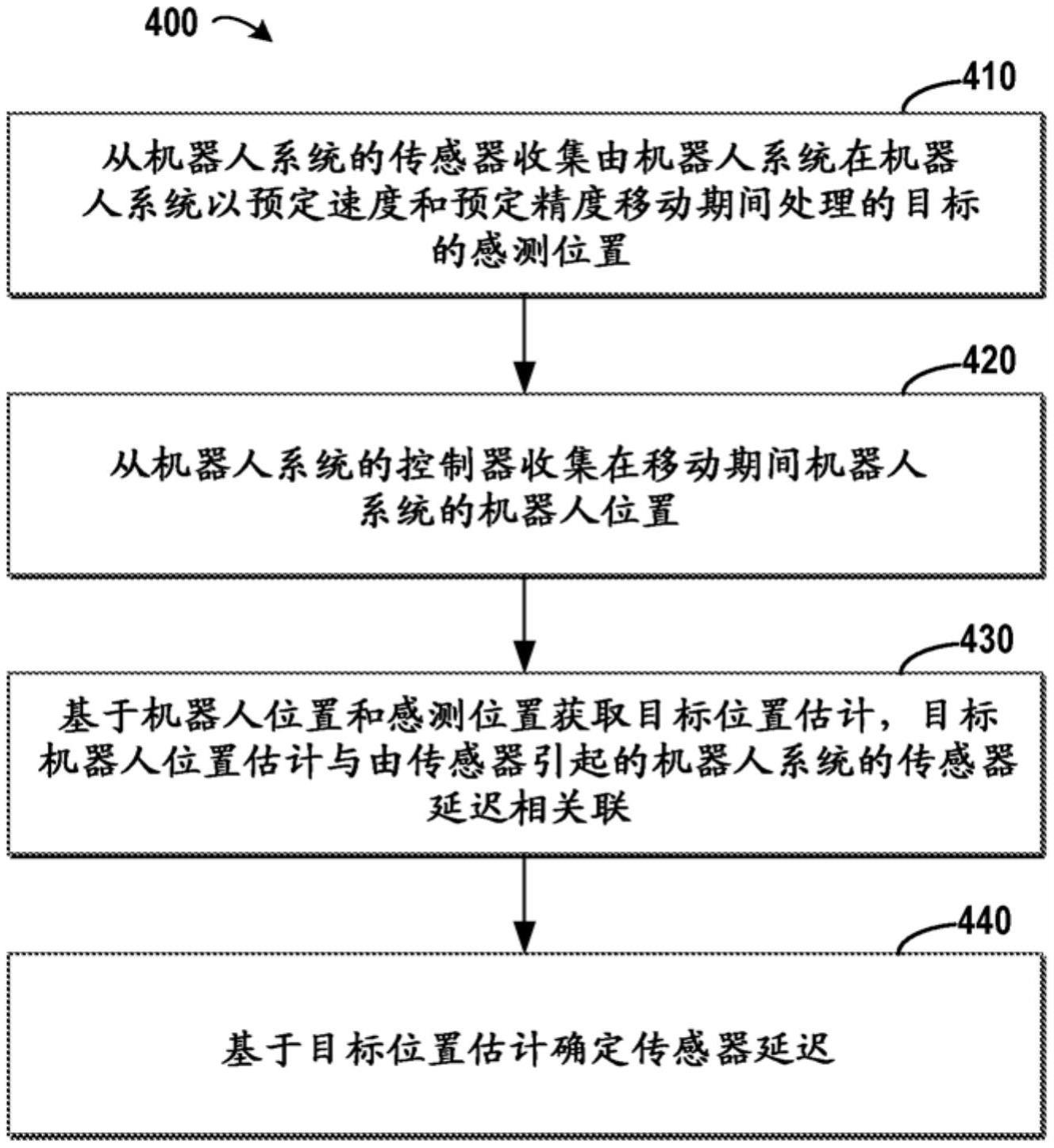
2、根据第一方面,本公开的示例性实施例提供了一种用于调整机器人系统的方法。方法包括:从机器人系统的传感器收集由机器人系统在机器人系统以预定速度和预定精度移动期间处理的目标的感测位置;从机器人系统的控制器收集机器人系统在移动期间的机器人位置;基于机器人位置和感测位置获取目标位置估计,目标位置估计与由传感器引起的机器人系统的传感器延迟相关联;以及基于目标位置估计来确定传感器延迟。在这样的实施例中,不需要工程师具有关于控制参数的丰富知识,并且需要做的唯一事情是输入机器人系统运行的预定速度和精度。作为用于控制机器人系统的重要参数,传感器延迟可以通过实施本公开的方法而无需任何人工劳动来自动确定。
3、在一些实施方式中,获取目标位置估计包括:基于对机器人位置的回归操作来确定机器人位置估计;以及基于在移动期间的多个时间点处的机器人位置估计与感测位置之间的几何关系来获取目标位置估计。在这样的实施例中,确定传感器延迟的问题被转换为求解目标位置公式,因此可以以简单和有效的方式确定传感器延迟。
4、在一些实施例中,确定传感器延迟包括:基于目标的目标位置和目标位置估计生成目标位置公式;以及通过求解目标位置公式来确定传感器延迟,使得所确定的传感器延迟最小化目标位置公式。由于上述差异取决于在传感器延迟内移动的距离,对于这些实施例,可以通过以有效的方式最小化差异来确定传感器延迟。
5、在一些实施方案中,方法还包括:基于传感器延迟和在给定时间点的感测位置来确定目标在给定时间点处的经校正目标位置。在这样的实施例中,所确定的传感器延迟可以用于在将来的时间点校正目标位置,以便补偿由传感器延迟引起的目标位置中的误差。
6、在一些实施方案中,方法还包括:获取用于在多个时间点控制机器人系统的速度命令;以及基于速度命令和机器人位置确定由控制器引起的机器人延迟。由于机器人延迟影响机器人系统的精度,在这样的实施例中,可以确定机器人延迟以便进一步校正机器人系统的运动。
7、在一些实施例中,获取速度命令包括:相对于多个时间点中的一个时间点,标识机器人系统在时间点处的位置误差;以及基于位置误差与准确度的比较来获取速度命令中的速度命令。速度命令是用于控制机器人系统的重要参数。在这样的实施例中,可以基于比较操作通过简单有效的方式来确定速度命令。
8、在一些实施例中,标识定位误差包括:基于时间点的目标位置估计和机器人位置估计来标识位置误差。在这样的实施例中,可以使用在每个时间点所估计的目标位置和机器人位置来确定位置误差,因此可以以精细粒度来确定位置误差。
9、在一些实施例中,确定机器人延迟包括:基于机器人延迟、多个时间点的机器人位置和速度命令之间的几何关系生成机器人位置公式;以及通过求解机器人位置公式来确定机器人延迟,使得所确定的机器人延迟最小化机器人位置公式。在这样的实施例中,机器人延迟的确定被转换成求解机器人位置公式的问题,并且因此可以以简单而有效的方式确定机器人延迟。
10、在一些实施方案中,方法还包括:通过利用机器人延迟和在给定时间点的速度命令更新在给定时间点的机器人系统的机器人位置,确定在给定时间点的机器人系统的校正机器人位置。在这样的实施例中,所确定的机器人延迟可以用于在将来的时间点校正机器人位置,以便补偿由机器人延迟引起的机器人位置的误差。
11、在一些实施方案中,方法还包括:基于传感器延迟和机器人延迟来确定用于控制机器人系统的参数,参数包括以下中的任一项:机器人系统的缓冲器长度、用于控制速度命令的强度以及机器人系统的死区。传感器延迟和机器人延迟显着地影响控制机器人系统的精度。在这样的实施例中,可以基于传感器延迟和机器人延迟来确定更多的控制参数,以便确保机器人系统可以以准确和有效的方式运行。
12、根据第二方面,本公开的示例性实施例提供了一种用于调整机器人系统的装置。装置包括:感测位置收集单元,被配置为从机器人系统的传感器收集在机器人系统以预定速度和预定精度移动期间由机器人系统处理的目标的感测位置;机器人位置采集单元,被配置为从机器人系统的控制器采集机器人系统在移动期间的机器人位置;获取单元,被配置用于基于机器人位置和感测位置获取目标位置估计,目标位置估计与由传感器引起的机器人系统的传感器延迟相关联;以及确定单元,被配置用于基于目标位置估计来确定传感器延迟。
13、在一些实施例中,机器人位置估计单元,被配置用于基于对机器人位置的回归操作来确定机器人位置估计;以及目标位置估计单元,目标位置估计单元被配置为基于在移动期间的多个时间点的机器人位置估计与感测位置之间的几何关系来获取目标位置估计。
14、在一些实施例中,确定单元包括:生成单元,被配置为基于目标的目标位置和目标位置估计生成目标位置公式;以及传感器延迟确定单元,被配置为通过求解目标位置公式来确定传感器延迟,使得所确定的传感器延迟最小化目标位置公式。
15、在一些实施例中,设备还包括:目标位置确定单元,被配置为基于传感器延迟和在给定时间点的感测位置来确定目标在给定时间点的校正目标位置。
16、在一些实施例中,设备还包括:命令获取单元,被配置为获取用于在多个时间点控制机器人系统的速度命令;以及机器人延迟确定单元,被配置为基于速度命令和机器人位置来确定由控制器引起的机器人延迟。
17、在一些实施方式中,命令获取单元包括:标识单元,被配置用于标识机器人系统在时间点相对于多个时间点中的时间点的位置误差;以及速度命令获取单元,被配置为基于位置误差与准确度的比较来获取速度命令中的速度命令。
18、在一些实施例中,标识单元包括:误差标识单元,被配置为基于在时间点的目标位置估计和机器人位置估计来标识位置误差。
19、在一些实施方式中,机器人延迟确定单元包括:机器人位置公式生成单元,被配置为基于在多个时间点的机器人延迟,机器人位置和速度命令之间的几何关系来生成机器人位置公式;以及求解单元,被配置为通过求解机器人位置公式来确定机器人延迟,使得所确定的机器人延迟最小化机器人位置公式。
20、在一些实施例中,设备还包括:机器人位置确定单元,被配置为通过利用机器人延迟和在给定时间点的速度命令更新在给定时间点的机器人系统的机器人位置,来确定在给定时间点的机器人系统的校正机器人位置。
21、在一些实施例中,设备还包括:参数确定单元,被配置为用于基于传感器延迟和机器人延迟来确定用于控制机器人系统的参数,参数包括以下中的任一项:机器人系统的缓冲器长度、用于控制速度命令的强度以及机器人系统的死区。
22、根据第三方面,本公开的示范性实施例提供了一种用于调整机器人系统的系统。系统包括:被耦合到计算机可读存储器单元的计算机处理器,存储器单元包括当由计算机处理器执行时实现用于调整机器人系统的方法的指令。
23、根据第四方面,本公开的示例性实施例提供了一种其上存储有指令的计算机可读介质,当在至少一个处理器上执行指令时,指令使至少一个处理器执行用于调整机器人系统的方法。
- 还没有人留言评论。精彩留言会获得点赞!