智能执手锁的制作方法
1.本发明涉及智能执手锁。
背景技术:
2.执手锁,执手锁分为分体锁、连体锁、三杆快装锁,产品安全性比较好,常用于入户门,房间门,住宅、写字楼、酒店等均可用到。
3.随着生活水品的提高,有部分住户逐渐更换调了传统的门锁,改用更为先进智能门锁。
4.现有的智能门锁均包括一个尺寸较大的面板,智能门锁的离合电机安装于面板内腔,这是一个很常见的结构设计,因为面板的空间大,能够塞得进一个离合电机,但是这样操作,造整个智能门锁的体积较大,智能门锁普遍安装于入户门。
5.用户需要房间门也使用智能门锁时,若安装现有的智能门锁,由于智能门锁的体积较大,智能门锁安装在房间门不美观,而且还需要另外开孔,破坏门体,因此发明一种智能的智能执手锁,所有模块集中在把手上,智能执手锁既可以安装于房间门不破坏门体,也具备智能解锁的功能,适用于多种门锁如入户门锁、房门锁、浴室锁、断桥锁、公寓锁、办公用锁等,满足用户需求。
技术实现要素:
6.本发明的目的在于提供一种具备智能解锁功能、体积小、安全可靠的智能执手锁。
7.本发明的目的是这样实现的:一种智能执手锁,包括把手、解锁识别装置、电子解锁装置、供电装置、方芯和联轴器,所述把手包括壳体和手柄,所述解锁识别装置设置在壳体/手柄的表面,所述电子解锁装置设置在壳体内腔,所述供电装置设置在壳体/手柄内腔,供电装置为解锁识别装置和电子解锁装置提供电源;所述联轴器包括前半联轴器和后半联轴器,所述后半联轴器以滑动方式设置在壳体内腔并跟随把手旋转,所述电子解锁装置靠近后半联轴器;所述前半联轴器设置在壳体内腔靠近后半联轴器,所述方芯一端连接前半联轴器,方芯另一端伸出壳体外;所述解锁识别装置识别到解锁信号,解锁识别装置传递解锁信号至电子解锁装置,电子解锁装置推动后半联轴器与前半联轴器连接,令方芯跟随把手旋转。
8.所述智能执手锁的把手设置有一壳体,所述解锁识别装置和电子解锁装置藏于壳体内,当解锁识别装置获取解锁信号时,解锁识别装置传递解锁信号至电子解锁装置,电子解锁装置推动后半联轴器与前半联轴器连接,此时用户带动把手旋转,方芯跟随把手旋转带动锁舌伸缩,进行上锁或解锁操作,安全可靠,而且智能执手锁和传统执手锁相比,智能执手锁具备智能解锁方式,用户无需钥匙也可以进行解锁,满足用户不同需求。
9.再有,所述智能执手锁与传统智能门锁相比,所述智能执手锁无需将解锁识别装
置和电子解锁装置设置在面板上,大大减少面板尺寸,因此智能执手锁的面板尺寸可以与传统执手锁的面板尺寸相同,令智能执手锁安装于房间门时,无需破坏房间门原有结构,安装简单并保持房间门美观,同时实现智能解锁,满足用户需求。
10.本发明的目的还可以采用以下技术措施解决:进一步地,还包括机械解锁装置,所述机械解锁装置设置在壳体内腔靠近后半联轴器,所述机械解锁装置动作,机械解锁装置推动后半联轴器与前半联轴器连接,令方芯跟随把手旋转。
11.所述机械解锁装置动作,机械解锁装置推动后半联轴器与前半联轴器连接,此时用户带动把手旋转,方芯跟随把手旋转带动锁舌伸缩,进行上锁或解锁操作,操作简单,安全可靠,通过增设机械解锁装置,当电子解锁装置失灵或电量不足时,智能执手锁无法智能解锁时,用户也可以通过机械方式进行解锁,满足用户需求,提高智能执手锁安全性和可靠性。
12.进一步地,机械解锁装置包括滑片和锁胆,所述锁胆包括锁芯和偏心轴,壳体对应锁胆的位置开有锁孔,所述偏心轴和锁芯连接并跟随锁芯旋转,所述滑片开有滑槽,滑片以滑动方式设置在壳体内腔内并靠近后半联轴器,所述偏心轴伸入滑槽内,所述锁芯旋转时带动偏心轴移动,偏心轴在滑槽内滑行并推动滑片移动,令滑片推动后半联轴器与前半联轴器连接。
13.所述用户将钥匙插入锁胆,钥匙带动锁芯正转或反转,当锁芯正转时,偏心轴推动滑片移动,滑片推动后半联轴器与前半联轴器连接,此时用户带动把手旋转,方芯跟随把手旋转带动锁舌伸缩,进行上锁或解锁操作,安全可靠,当锁芯反转时,偏心轴推动滑片移动,滑片推动后半联轴器与前半联轴器断开,此时用户带动把手旋转,方芯不跟随把手旋转,把手处于空转状态。
14.进一步地,所述壳体开有第一连接口,位于连接口上方的壳体内腔设置有连接板,所述连接板对应第一连接口位置开有第二连接口,而且第二连接口处设置有阻挡板,所述手柄的一端部穿过第一连接口插入第二连接口内并抵靠在阻挡板上,伸入第二连接口的手柄的一端部与连接板焊接在一起。
15.所述手柄依次穿过第一连接口和第二连接口内,直至手柄的一端部抵靠在阻挡板上,所述阻挡板限制手柄的插入深度,方便工人将壳体和手柄组装成把手,伸入第二连接口的手柄的一端部与连接板焊接在一起,由于焊接点位于壳体内腔,降低焊接难度,无需再打磨抛光,既省时又保证产品外观的一致性,成本低且质量好,而且焊接痕迹不暴露在把手外部,令整个把手更美观。
16.进一步地,所述电子解锁装置包括滑块、弹簧和电机,所述滑块以滑动方式设置在壳体内,滑块和后半联轴器连接,所述滑块开有弹簧移动腔,所述电机的转轴伸入弹簧移动腔内,所述转轴外壁设置有凸起,所述弹簧置于弹簧移动腔内并套置在转轴上,凸起插入弹簧的间隙内,弹簧构成后半联轴器的复位机构;所述电机正转时,弹簧的弹簧丝跟随凸起正转,弹簧往凸起的前方移动并推动滑块往前方移动,后半联轴器跟随滑块往前方移动与前半联轴器连接;所述电机反转时,弹簧的弹簧丝跟随凸起反转,弹簧往凸起的后方移动并推动滑块往后方移动,后半联轴器跟随滑块往后方移动与前半联轴器断开。
17.所述电机正转时,弹簧移动至转轴的凸起前方推动后半联轴器与前半联轴器连接,电机反转时,弹簧移动至转轴的凸起后方推动后半联轴器与前半联轴器断开,通过电机的正转或反转即可控制把手处于控制方芯动作状态或处于空转状态,当把手处于控制方芯动作状态时,用户带动把手旋转,即可实现上锁或解锁操作,当把手处于空转状态时,用户带动把手旋转,无法进行上锁或解锁操作,原理简单,安全可靠。
18.再有,机械解锁装置的滑片推动后半联轴器与前半联轴器连接时,弹簧被压缩,此时把手处于控制方芯动作状态,用户带动把手旋转,即可实现上锁或解锁操作,当机械解锁装置的滑片远离后半联轴器时,弹簧复位推动后半联轴器远离前半联轴器断开,此时把手处于空转状态。
19.进一步地,所述滑块和后半联轴器错位,滑块和后半联轴器一体成型。由于滑块和后半联轴器错位,电子解锁装置推动滑块移动即可控制后半联轴器移动,滑块和后半联轴器错位区域形成机械解锁装置的滑片推动区域,便于机械解锁装置推动后半联轴器移动,电子解锁装置和机械解锁装置互不干扰,提高智能执手锁的可靠性。
20.进一步地,所述滑块设置有滑行边,所述壳体的内壁开有滑行槽,滑行边置于滑行槽内,滑块沿滑行槽滑行时,后半联轴器跟随滑块移动。
21.所述壳体内壁设置有滑行槽,所述滑行边置于滑行槽内,所述滑行边沿滑行槽滑行时,带动滑块前后滑行,滑块推动后半联轴器与前半联轴器连接或断开,当后半联轴器与前半联轴器连接时,此时用户旋转把手,滑块、后半联轴器、前半联轴器和方芯跟随把手旋转,方芯旋转带动锁舌伸缩,进行上锁或解锁操作。
22.进一步地,所述壳体为前后贯通的圆柱状壳体,所述解锁识别装置包括解锁操控面板和电路板,所述电路板上设置有密码识别模块、指纹识别模块和ic卡识别模块,所述解锁操控面板设置在壳体的前端口,所述解锁操控面板设置有环状密码输入面板,所述环状密码输入面板和密码识别模块电连接,所述解锁操控面板对应环状密码输入面板的中心位置设置有指纹识别面板,所述指纹识别面板和指纹识别模块电连接,所述ic卡识别模块的感应端紧贴解锁操控面板的背面,解锁操控面板形成ic卡识别模块的感应区域,所述供电装置为解锁操控面板和电路板供电。
23.所述用户可以密码、识别指纹或刷ic卡的方式进行解锁,当密码输入正确、指纹录入正确或刷正确的ic卡时,密码识别模块、指纹识别模块或ic卡识别模块发出解锁信号至电路板,电路板带动电机正转,后半联轴器与前半联轴器连接,把手处于控制方芯动作状态,用户带动把手旋转,即可实现上锁或解锁操作。
24.进一步地,所述供电装置包括导电端头和电池盒,所述导电端头和电池盒置于手柄内腔,导电端头伸出手柄的上端口分别与解锁识别装置和电子解锁装置电连接,所述电池盒和导电端头电连接,电池盒的入口朝向手柄的下端口,所述手柄的下端口处设置有可拆式堵盖。
25.所述供电装置设置在手柄内腔,充分利用手柄的空间,用户打开堵盖即可进行更换电池,电池更换简单,而且电池藏于手柄内腔,不占据壳体空间,减少把手的体积,增强把手的美观。
26.进一步地,还包括安装座,所述安装座包括第一安装部和第二安装部,所述第一安装部开有滑行通道和前半个锁胆安装腔,第一安装部对应滑行通道位置开有滑行槽,所述
第二安装部开有电机容置腔和后半个锁胆安装腔,所述第一安装部和第二安装部组装成安装座,前半个锁胆安装腔和后半个锁胆安装腔组成锁胆安装腔,所述锁定安装腔和滑行通道连通;所述滑块设置有滑行边,所述后半联轴器和滑块依次置于滑行通道内,滑行边置于滑行槽内,所述电机置于电机容置腔内,电机的转轴伸入滑行通道内连接滑块,实现电子解锁装置安装在安装座上。
27.所述电子解锁装置和机械解锁装置安装在安装座上,接着将解锁识别装置固定在壳体的第一安装腔,将安装座固定于壳体的第二安装腔,将供电装置安装于手柄内腔,即可完成智能执手锁的组装,整个组装过程简单,大大提高智能执手锁的生产效率。
28.本发明的有益效果如下:本发明,所述智能执手锁的把手设置有一壳体,所述解锁识别装置和电子解锁装置藏于壳体内,当解锁识别装置获取解锁信号时,解锁识别装置传递解锁信号至电子解锁装置,电子解锁装置推动后半联轴器与前半联轴器连接,此时用户带动把手旋转,方芯跟随把手旋转带动锁舌伸缩,进行上锁或解锁操作,安全可靠,而且智能执手锁和传统执手锁相比,智能执手锁具备智能解锁方式,用户无需钥匙也可以进行解锁,满足用户不同需求。
29.本发明,所述智能执手锁与传统智能门锁相比,所述智能执手锁无需将解锁识别装置和电子解锁装置设置在面板上,大大减少面板尺寸,因此智能执手锁的面板尺寸可以与传统执手锁的面板尺寸相同,令智能执手锁安装于房间门时,无需破坏房间门原有结构,安装简单并保持房间门美观,同时实现智能解锁,满足用户需求。
30.本发明,所述机械解锁装置动作,机械解锁装置推动后半联轴器与前半联轴器连接,此时用户带动把手旋转,方芯跟随把手旋转带动锁舌伸缩,进行上锁或解锁操作,操作简单,安全可靠,通过增设机械解锁装置,当电子解锁装置失灵或电量不足时,智能执手锁无法智能解锁时,用户也可以通过机械方式进行解锁,满足用户需求,提高智能执手锁安全性和可靠性。
附图说明
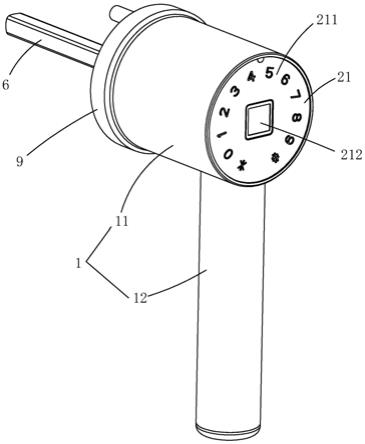
31.图1为智能执手锁示意图(圆形面板)。
32.图2为智能执手锁的分解图。
33.图3为智能执手锁的把手示意图。
34.图4为智能执手锁的把手分解图。
35.图5为智能执手锁的电子解锁装置、机械解锁装置装配图(后半联轴器和前半联轴器断开)。
36.图6为智能执手锁的电子解锁装置、机械解锁装置剖示图(后半联轴器和前半联轴器断开)。
37.图7为智能执手锁的电子解锁装置、机械解锁装置装配图(滑块推动后半联轴器和前半联轴器连接)。
38.图8为智能执手锁的电子解锁装置、机械解锁装置剖示图(滑块推动后半联轴器和前半联轴器连接。
39.图9为智能执手锁的电子解锁装置、机械解锁装置装配图(滑片推动后半联轴器和
前半联轴器连接)。
40.图10为智能执手锁的电子解锁装置、机械解锁装置剖示图(滑片推动后半联轴器和前半联轴器连接。
41.图11为智能执手锁的电子解锁装置、机械解锁装置和安装座分解图。
42.图12为智能执手锁的第一安装部示意图。
43.图13为智能执手锁示意图(方形面板)。
具体实施方式
44.下面结合附图及实施例对本发明作进一步描述:实施例,结合图1到图13所示,一种智能执手锁,包括把手1、解锁识别装置2、电子解锁装置3、机械解锁装置4、供电装置5、方芯6、联轴器7、安装座8和面板9,所述联轴器7包括前半联轴器71和后半联轴器72。
45.所述把手1包括壳体11和手柄12,所述壳体11为前后贯通的圆柱状壳体,壳体11内腔设置有分隔板13,所述分隔板13间隔开有便于设备安装的螺丝孔131,所述壳体11的前端口和分隔板13围成第一安装腔14,所述壳体11的后端口和分隔板13围成第二安装腔16。
46.所述第一安装腔14对应的壳体11外壁开有第一连接口141,位于第一连接口141上方的壳体11内腔设置有连接板15,所述连接板15对应第一连接口141位置开有第二连接口151,而且第二连接口151处设置有阻挡板161,所述阻挡板161开有螺丝孔131,所述第二安装腔16对应的壳体11外壁开有锁孔152,所述锁孔152处设置有装饰盖17。
47.所述手柄12为前后贯通的手柄12,手柄12的上端部穿过第一连接口141插入第二连接口151内并抵靠在阻挡板161上,伸入第二连接口151的手柄12的一端部与连接板15焊接在一起,实现手柄12和壳体11连接组成把手1,所述手柄12的下端部设置有可拆式堵盖10。
48.所述安装座8包括第一安装部81和第二安装部82,所述第一安装部81开有滑行通道87和前半个锁胆安装腔83,第一安装部81对应滑行通道87位置开有滑行槽84。
49.所述第二安装部82开有电机容置腔85和后半个锁胆安装腔86,所述第一安装部81和第二安装部82组装成安装座8,前半个锁胆安装腔83和后半个锁胆安装腔86组成锁胆安装腔88,所述锁定安装腔和滑行通道87连通。
50.所述方芯6和前半联轴器71连接,所述前半联轴器71伸入滑行通道87内,方芯6露出滑行通道87外,所述电子解锁装置3包括滑块31、弹簧32和电机33,所述滑块31开有弹簧移动腔34,滑块31外壁设置有滑行边35,所述滑块31和后半联轴器72错位,滑块31和后半联轴器72一体成型,所述后半联轴器72伸入滑行通道87内靠近前半联轴器71。
51.所述电机33坐于电机容置腔85,所述电机33的转轴331外壁设置有凸起332,电机33的转轴331伸入弹簧移动腔34内,所述弹簧32置于弹簧移动腔34内并套置在转轴331上,凸起332插入弹簧32的间隙内,弹簧32构成后半联轴器72的复位机构。
52.所述电机33正转时,弹簧32的弹簧32丝跟随凸起332正转,弹簧32往凸起332的前方移动并推动滑块31往前方移动,后半联轴器72跟随滑块31往前方移动与前半联轴器71连接;
所述电机33反转时,弹簧32的弹簧丝跟随凸起332反转,弹簧32往凸起332的后方移动并推动滑块31往后方移动,后半联轴器72跟随滑块31往后方移动与前半联轴器71断开。
53.所述机械解锁装置4包括滑片41和锁胆42,所述锁胆42设置在锁胆安装腔88421,锁胆42包括锁芯43和偏心轴44,所述偏心轴44和锁芯43连接并跟随锁芯43旋转。所述滑片41开有滑槽411,滑片41以滑动方式设置在滑行通道87内并靠近后半联轴器72,所述偏心轴44伸入滑槽411内,所述锁芯43旋转时带动偏心轴44移动,偏心轴44在滑槽411内滑行并推动滑片41移动,令滑片41推动后半联轴器72与前半联轴器71连接。
54.所述电子解锁装置3和机械解锁装置4均安装在安装座8上,工人将安装座8置于壳体11的第二安装腔16内,螺丝穿过分隔板13的螺丝孔131锁紧于安装座8上,安装座8固定在第二安装腔16内,实现从而将电子解锁装置3和机械解锁装置4快速安装在壳体11上,操作简单。
55.所述解锁识别装置2包括解锁操控面板21和电路板22,所述电路板22上设置有密码识别模块221、指纹识别模块222和ic卡识别模块223,所述电路板22置于壳体11的第一安装腔14内,螺丝穿过分隔板13的螺丝孔131锁紧电路板22,所述解锁操控面板21设置在壳体11的前端口,螺丝穿过分隔板13的螺丝孔131锁紧解锁操控面板21,实现解锁识别装置2安装在壳体11上,操作简单。
56.所述解锁识别装置2也可以包括无线信号识别模块,用户利用手持终端(例如手机)进行上锁或解锁操作。
57.所述解锁操控面板21设置有环状密码输入面板211,所述环状密码输入面板211和密码识别模块221电连接,所述解锁操控面板21对应环状密码输入面板211的中心位置设置有指纹识别面板212,所述指纹识别面板212和指纹识别模块222电连接,所述ic卡识别模块223的感应端紧贴解锁操控面板21的背面,解锁操控面板21形成ic卡识别模块223的感应区域。
58.所述供电装置5包括导电端头51和电池盒52,所述导电端头51和电池盒52置于手柄12内腔,导电端头51上端伸出手柄12的上端口连接阻挡板161的螺丝孔131,导电端头51上端分别与解锁识别装置2和电子解锁装置3电连接,所述导电端头51下端和电池盒52电连接,电池盒52的入口朝向手柄12的下端口。
59.所述面板9为圆形面板或方形面板,所述面板9设置有把手复位装置(图中未出示),所述门体(图中未出示)安装有锁体(图中未出示),门框(图中未出示)对应锁体的锁舌(图中未出示)位置开有锁舌盒(图中未出示),所述面板9固定在门体上对应锁体位置,所述安装座8穿过面板9和把手1复位装置连接,把手1复位装置构成把手1的旋转复位机构,同时方芯6插入锁体的锁孔152内带动锁舌伸缩。
60.工作原理:电子解锁方式:用户输入正确密码、刷ic卡或指纹识别,从而使密码识别模块221、指纹识别模块222或ic卡识别模块223发出解锁信号至电路板22,电路板22带动电机33正转;所述电机33正转时,弹簧32的弹簧32丝跟随凸起332正转,弹簧32往凸起332的前方移动并推动滑块31往前方移动,后半联轴器72跟随滑块31往前方移动与前半联轴器71连
接,此时用户扳动手柄12带动把手1旋转,所述安装座8、前半联轴器71、后半联轴器72和方芯6跟随把手1旋转,方芯6带动锁舌缩入锁体内,完成解锁。
61.解锁完成后,电路板22带动电机33反转,所述电机33反转时,弹簧32的弹簧32丝跟随凸起332反转,弹簧32往凸起332的后方移动并推动滑块31往后方移动,后半联轴器72跟随滑块31往后方移动与前半联轴器71断开,此时用户扳动手柄12带动把手1旋转,所述安装座8和后半联轴器72跟随把手1旋转,前半联轴器71和方芯6不动作,把手1处于空转状态。
62.机械解锁方式:用户打开装饰盖17,将钥匙插入锁胆42内,用户通过钥匙带动锁芯43正转时,锁芯43带动偏心轴44移动,偏心轴44在滑槽411内滑行并推动滑片41移动,令滑片41推动后半联轴器72与前半联轴器71连接,此时用户扳动手柄12带动把手1旋转,所述安装座8、前半联轴器71、后半联轴器72和方芯6跟随把手1旋转,方芯6带动锁舌缩入锁体内,完成解锁。
63.用户通过钥匙带动锁芯43反转,锁芯43带动偏心轴44移动,偏心轴44在滑槽411内滑行并推动滑片41移动,令滑片41推动后半联轴器72与前半联轴器71断开,此时用户扳动手柄12带动把手1旋转,所述安装座8和后半联轴器72跟随把手1旋转,前半联轴器71和方芯6不动作,把手1处于空转状态。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1