一种大型机甲战士机器人的制作方法
1.本发明涉及机器人技术领域,具体为一种大型机甲战士机器人。
背景技术:
2.机器人被誉为“制造业皇冠顶端的明珠”,其研发、制造和应用是衡量一个国家科技创新和高端制造业水平的重要标志,机器人制造业正成为各种最新技术交融演进的竞技场,在改变着机器人自身面貌的同时,影响着社会的发展和未来,地面机器人是指在地面上运动,加装各种传感器或武器装备的智能无人操作机械,绝大多数地面机器人由模仿人或动物的运动机理和功能而来,通常被称为仿生机器人,例如四足机器人、双足人形机器人、蛇形机器人等,随着科技发展和局部战争催生,近年来世界范围内的地面机器人产业蓬勃发展,机甲战士纷纷亮相,不少走进战场,经受实战考验,因此出现了一种巨型机器人机甲战士,大型机甲战士机器人主要用于表演、演出展览等场合,机器人总高度十多米至几十米不等,机械人的所有运动关节均有机械机构和电气控制实现,能够实现普通人常规的动作。
3.现今市场上的此类机器人种类繁多,基本可以满足人们的使用需求,但是依然存在一定的问题,现有的此类机器人在使用时一般不便于用最简单的实现方式制作演出效果最佳的机器人,大大的增加了机器人的制作成本,大大的影响了机器人使用时的可靠性,从而给人们的使用带来了很大的困扰。
技术实现要素:
4.本发明的目的在于提供一种大型机甲战士机器人,以解决上述背景技术中提出机器人不便于用最简单的实现方式制作演出效果最佳的机器人的问题。
5.为实现上述目的,本发明提供如下技术方案:一种大型机甲战士机器人,包括基座、行走驱动卷扬机、行走车台、机器人主体和肩关节铰接支座,所述机器人主体的外部设有行走车台,所述行走车台下方的基座外部设有基座,且基座的顶端安装有行走驱动卷扬机,所述行走车台的底端安装有四组行走支撑轮,所述行走支撑轮一侧的基座内部设有钢丝绳组件,且钢丝绳组件一侧的基座内部设有拐角滑轮,所述机器人主体的内部设有机器人颈,所述机器人颈的外壁上安装有第一减速电机,所述第一减速电机一侧的机器人颈外壁上安装有第一回转支撑,所述第一回转支撑的顶端安装有第一铰接支座,所述第一铰接支座的顶端安装有机器人头,且机器人头的底端安装有第一伸缩推杆。
6.优选的,所述机器人主体的外壁上安装有第二减速电机,所述第二减速电机的外壁上安装有第二万向轴,且第二万向轴一侧的机器人主体外壁上安装有第二轴承组件,所述第二轴承组件一侧的机器人主体外壁上安装有肩关节组件,且肩关节组件的外壁上设有肩关节铰接支座,所述肩关节铰接支座的外壁上安装有第二大链轮。
7.优选的,所述肩关节组件的外部设有肩关节臂架,且肩关节臂架的内部设有第六减速电机,所述第六减速电机的外壁上安装有第二小链轮,且第二小链轮的表面设有第二传动链条。
8.优选的,所述肩关节臂架的内部设有第三减速电机,且第三减速电机一侧的肩关节臂架内部设有第三万向轴,所述肩关节臂架的底端安装有第三轴承组件,所述第三轴承组件的底端安装有肘关节组件。
9.优选的,所述肘关节组件的底端设有肘关节臂架,且肘关节臂架的内部安装有第四减速电机,所述第四减速电机的外壁上安装有第三小链轮,且第三小链轮上方的肘关节组件内部安装有肘关节铰接支座,所述肘关节铰接支座的外壁上安装有第三大链轮,第三大链轮的表面缠绕有第三传动链条。
10.优选的,所述肘关节臂架的底端安装有手指,所述手指的外壁上安装有多组联动齿形皮带轮,所述联动齿形皮带轮的外壁上设有第一齿形皮带,所述联动齿形皮带轮一侧的手指外壁上设有第一联动齿轮组,且第一联动齿轮组上方的肘关节臂架底端安装有驱动推杆。
11.优选的,所述行走车台的外部设有第二腿关节臂,第二腿关节臂的外壁上安装有第二伸缩推杆,所述第二腿关节臂的内部设有惰轮,所述惰轮一侧的第二腿关节臂内部设有第二联动齿轮组,且第二联动齿轮组下方的第二腿关节臂内部设有联动齿形链轮,所述联动齿形链轮一侧的第二腿关节臂内部设有第二齿形皮带,且第二齿形皮带下方的第二腿关节臂底端安装有第一腿关节臂。
12.优选的,所述机器人主体的内部设有上身结构,所述上身结构的底端安装有主体结构,所述主体结构的顶端安装有第五回转支撑,所述第五回转支撑的外壁上安装有第五减速电机。
13.优选的,所述上身结构的外壁上安装有爬梯,且爬梯的外部设有升降悬臂梁,所述升降悬臂梁的外部设有升降导向柱。
14.优选的,所述上身结构的内部设有中空区域,且中空区域一侧的上身结构内部设有中空核动力显示屏,所述升降导向柱的外壁上设有配重,且配重下方的升降导向柱外壁上设有动力卷扬机,所述升降导向柱的表面设有导向轮组件,且导向轮组件上方的升降导向柱顶端设有驱动滑轮,所述驱动滑轮的表面设有加长钢丝绳。
15.与现有技术相比,本发明的有益效果是:该机器人不仅实现了用最简单的实现方式制作演出效果最佳的机器人,所有运动均采用可靠、简单、耐用的机械机构和结构实现,而且此机器人填补国内演出行业在机甲战士方面建设制造的空白;(1)机器人上身结构采用重型钢结构设计,中部位置中空,便于人员进出施工,内设爬梯50,方便安装设备、桥架线缆等,升降悬臂梁51采用钢板框架结构,确保主体结构的刚度和可靠性(2)采用中空核动力显示屏54设计,外圈圆环显示核动力图像,中空区域53用于布置灯光、喷雾、烟花等特效演出装置,所有运动均采用可靠、简单、耐用的机械机构和结构实现,用最简单的实现方式制作演出效果最佳的机器人。
16.(3)机器人运动机构和结构完整,能够实现完整人体的常规动作,机器人整体完整性好,目前国内没有实际建设制造大型机甲战士机器人的案例,此机器人填补国内演出行业在机甲战士方面建设制造的空白。
附图说明
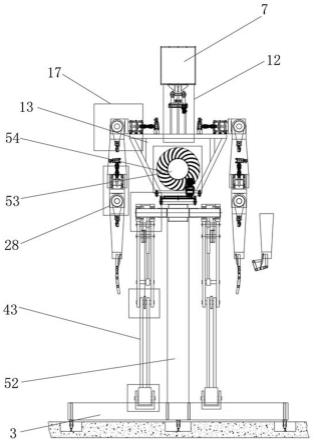
17.图1为本发明的正视剖面结构示意图;图2为本发明的机器人主体侧视剖面结构示意图;图3为本发明的机器人颈剖视结构示意图;图4为本发明的肩关节组件正视剖面结构示意图;图5为本发明的肘关节臂架正视剖面结构示意图;图6为本发明的驱动推杆剖视结构示意图;图7为本发明的第二腿关节臂剖视结构示意图;图8为本发明的上身结构剖视结构示意图;图9为本发明的升降导向柱侧视剖面结构示意图;图10为本发明的中空区域正视剖面结构示意图。
18.图中:1、基座;2、行走驱动卷扬机;3、行走车台;4、行走支撑轮;5、钢丝绳组件;6、拐角滑轮;7、机器人头;8、第一伸缩推杆;9、第一铰接支座;10、第一回转支撑;11、第一减速电机;12、机器人颈;13、机器人主体;14、第二减速电机;15、第二万向轴;16、第二轴承组件;17、肩关节组件;18、肩关节铰接支座;19、第二大链轮;20、第二传动链条;21、第二小链轮;22、肩关节臂架;23、第六减速电机;25、第三减速电机;26、第三万向轴;27、第三轴承组件;28、肘关节组件;29、肘关节铰接支座;30、第三大链轮;31、第三传动链条;32、第三小链轮;33、肘关节臂架;34、第四减速电机;35、驱动推杆;36、第一联动齿轮组;37、第一齿形皮带;38、联动齿形皮带轮;39、惰轮;40、第二联动齿轮组;41、第二伸缩推杆;42、联动齿形链轮;43、第一腿关节臂;44、第二腿关节臂;45、第二齿形皮带;46、上身结构;47、第五减速电机;48、第五回转支撑;49、主体结构;50、爬梯;51、升降悬臂梁;52、升降导向柱;53、中空区域;54、中空核动力显示屏;55、手指;56、动力卷扬机;57、配重;58、导向轮组件;59、驱动滑轮;60、加长钢丝绳。
具体实施方式
19.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
20.请参阅图1-10,本发明提供的一种实施例:一种大型机甲战士机器人,包括基座1、行走驱动卷扬机2、行走车台3、机器人主体13和肩关节铰接支座18,机器人主体13的外部设有行走车台3,行走车台3下方的基座1外部设有基座1,且基座1的顶端安装有行走驱动卷扬机2,行走车台3的底端安装有四组行走支撑轮4,行走支撑轮4一侧的基座1内部设有钢丝绳组件5,且钢丝绳组件5一侧的基座1内部设有拐角滑轮6,机器人主体13的内部设有机器人颈12,机器人颈12的外壁上安装有第一减速电机11,第一减速电机11一侧的机器人颈12外壁上安装有第一回转支撑10,第一回转支撑10的顶端安装有第一铰接支座9,第一铰接支座9的顶端安装有机器人头7,且机器人头7的底端安装有第一伸缩推杆8;使用时通过机器人行走,行走驱动卷扬机2带动钢丝绳组件5运动,行走车台3与钢丝绳组件5连接,钢丝绳组件5拉动行走车台3移动,基座1对行走驱动卷扬机2进行支撑,多组行走支撑轮4对基座1和行走车台3进行限位支撑,拐角滑轮6对钢丝绳组件5进行辅助配
合,使行走车台3驱动机器人主体13移动,机器人主体13、升降装置等设备均安装于行走车台3上,随着行走车台3一起行走,机器人行走过程中需腿部、手臂实现弯曲动作,机器人下蹲,动力卷扬机56带动加长钢丝绳60运动,加长钢丝绳60拉动导向轮组件58沿着升降导向柱52上下升降,机器人主体13与导向轮组件58连接,从而实现机器人主体13上下升降,配重57用于平衡总体重心,同时减小驱动功率,机器人下蹲或者起立过程中需腿部、手臂实现弯曲动作配合,机器人点头,机器人头7与机器人颈12活动连接,第一伸缩推杆8伸缩运动,实现点头运动,机器人颈12与机器人主体13连接,第一减速电机11与机器人头7通过第一回转支撑10连接,第一减速电机11转动,从而驱动机器人头7转动;机器人主体13的外壁上安装有第二减速电机14,第二减速电机14的外壁上安装有第二万向轴15,且第二万向轴15一侧的机器人主体13外壁上安装有第二轴承组件16,第二轴承组件16一侧的机器人主体13外壁上安装有肩关节组件17,且肩关节组件17的外壁上设有肩关节铰接支座18,肩关节铰接支座18的外壁上安装有第二大链轮19,肩关节组件17的外部设有肩关节臂架22,且肩关节臂架22的内部设有第六减速电机23,第六减速电机23的外壁上安装有第二小链轮21,且第二小链轮21的表面设有第二传动链条20,肩关节臂架22的内部设有第三减速电机25,且第三减速电机25一侧的肩关节臂架22内部设有第三万向轴26,肩关节臂架22的底端安装有第三轴承组件27,第三轴承组件27的底端安装有肘关节组件28,肘关节组件28的底端设有肘关节臂架33,且肘关节臂架33的内部安装有第四减速电机34,第四减速电机34的外壁上安装有第三小链轮32,且第三小链轮32上方的肘关节组件28内部安装有肘关节铰接支座29,肘关节铰接支座29的外壁上安装有第三大链轮30,第三大链轮30的表面缠绕有第三传动链条31;机器人肩关节前后摆臂,第二减速电机14驱动第二万向轴15转动,第二万向轴15驱动第二轴承组件16内部转动,从而驱动肩关节组件17前后摆动,机器人肩关节左右摆臂,第六减速电机23驱动第二小链轮21转动,在第二传动链条20的传动下驱动第二大链轮19转动,在肩关节铰接支座18的配合下,在肩关节组件17的支撑下驱动肩关节臂架22转动,使肩关节臂架22围绕肩关节组件17左右摆动,机器人肘关节扭动,第三减速电机25驱动第三万向轴26转动,在第三轴承组件27的配合下驱动肘关节组件28转动,肩关节臂架22进行支撑,机器人肘关节摆动,第四减速电机34驱动第三小链轮32转动,第三小链轮32带动第三传动链条31移动,第三传动链条31驱动第三大链轮30转动,在肘关节铰接支座29的配合下,在肘关节组件28的支撑下,肘关节臂架33进行左右的摆动;肘关节臂架33的底端安装有手指55,手指55的外壁上安装有多组联动齿形皮带轮38,联动齿形皮带轮38的外壁上设有第一齿形皮带37,联动齿形皮带轮38一侧的手指55外壁上设有第一联动齿轮组36,且第一联动齿轮组36上方的肘关节臂架33底端安装有驱动推杆35,行走车台3的外部设有第二腿关节臂44,第二腿关节臂44的外壁上安装有第二伸缩推杆41,第二腿关节臂44的内部设有惰轮39,惰轮39一侧的第二腿关节臂44内部设有第二联动齿轮组40,且第二联动齿轮组40下方的第二腿关节臂44内部设有联动齿形链轮42,联动齿形链轮42一侧的第二腿关节臂44内部设有第二齿形皮带45,且第二齿形皮带45下方的第二腿关节臂44底端安装有第一腿关节臂43,机器人主体13的内部设有上身结构46,上身结构46的底端安装有主体结构49,主体结构49的顶端安装有第五回转支撑48,第五回转支撑48的外壁上安装有第五减速电机47,上身结构46的外壁上安装有爬梯50,且爬梯50的外部
设有升降悬臂梁51,升降悬臂梁51的外部设有升降导向柱52,上身结构46的内部设有中空区域53,且中空区域53一侧的上身结构46内部设有中空核动力显示屏54,升降导向柱52的外壁上设有配重57,且配重57下方的升降导向柱52外壁上设有动力卷扬机56,升降导向柱52的表面设有导向轮组件58,且导向轮组件58上方的升降导向柱52顶端设有驱动滑轮59,驱动滑轮59的表面设有加长钢丝绳60;机器人手指运动,第一联动齿轮组36、联动齿形皮带轮38、第一齿形皮带37、肘关节臂架33等组成多节联动机构,驱动推杆35驱动根部行走车台3转动,从而带动多节联动机构弯曲运动,机器人腿部弯曲运,第二腿关节臂44、第二齿形皮带45、联动齿形链轮42、第一腿关节臂43组成多节联动机构,第二伸缩推杆41驱动根部第二腿关节臂44移动,从而带动多节联动机构弯曲运动,来驱动第二腿关节臂44和第一腿关节臂43弯曲移动,机器人腿部转动,在上身结构46的支撑下,第五减速电机47驱动第五回转支撑48转动,来驱动主体结构49转动,主体结构49带动腿部转动,机器人上身结构采用重型钢结构设计,中部位置中空,便于人员进出施工,内设爬梯50,方便安装设备、桥架线缆等,升降悬臂梁51采用钢板框架结构,确保主体结构的刚度和可靠性,采用中空核动力显示屏54设计,外圈圆环显示核动力图像,中空区域53用于布置灯光、喷雾、烟花等特效演出装置,所有运动均采用可靠、简单、耐用的机械机构和结构实现,用最简单的实现方式制作演出效果最佳的机器人,机器人运动机构和结构完整,能够实现完整人体的常规动作,机器人整体完整性好,目前国内没有实际建设制造大型机甲战士机器人的案例,此机器人填补国内演出行业在机甲战士方面建设制造的空白。
21.本技术实施例在使用时:外接电源,首先通过机器人行走,行走驱动卷扬机2带动钢丝绳组件5运动,行走车台3与钢丝绳组件5连接,钢丝绳组件5拉动行走车台3移动,基座1对行走驱动卷扬机2进行支撑,多组行走支撑轮4对基座1和行走车台3进行限位支撑,拐角滑轮6对钢丝绳组件5进行辅助配合,使行走车台3驱动机器人主体13移动,机器人主体13、升降装置等设备均安装于行走车台3上,随着行走车台3一起行走,机器人行走过程中需腿部、手臂实现弯曲动作,机器人下蹲,动力卷扬机56带动加长钢丝绳60运动,加长钢丝绳60拉动导向轮组件58沿着升降导向柱52上下升降,机器人主体13与导向轮组件58连接,从而实现机器人主体13上下升降,配重57用于平衡总体重心,同时减小驱动功率,机器人下蹲或者起立过程中需腿部、手臂实现弯曲动作配合,机器人点头,机器人头7与机器人颈12活动连接,第一伸缩推杆8伸缩运动,实现点头运动,机器人颈12与机器人主体13连接,第一减速电机11与机器人头7通过第一回转支撑10连接,第一减速电机11转动,从而驱动机器人头7转动,机器人肩关节前后摆臂,第二减速电机14驱动第二万向轴15转动,第二万向轴15驱动第二轴承组件16内部转动,从而驱动肩关节组件17前后摆动,机器人肩关节左右摆臂,第六减速电机23驱动第二小链轮21转动,在第二传动链条20的传动下驱动第二大链轮19转动,在肩关节铰接支座18的配合下,在肩关节组件17的支撑下驱动肩关节臂架22转动,使肩关节臂架22围绕肩关节组件17左右摆动,机器人肘关节扭动,第三减速电机25驱动第三万向轴26转动,在第三轴承组件27的配合下驱动肘关节组件28转动,肩关节臂架22进行支撑,机器人肘关节摆动,第四减速电机34驱动第三小链轮32转动,第三小链轮32带动第三传动链条31移动,第三传动链条31驱动第三大链轮30转动,在肘关节铰接支座29的配合下,在肘关节组件28的支撑下,肘关节臂架33进行左右的摆动,机器人手指运动,第一联动齿轮组36、
联动齿形皮带轮38、第一齿形皮带37、肘关节臂架33等组成多节联动机构,驱动推杆35驱动根部行走车台3转动,从而带动多节联动机构弯曲运动,机器人腿部弯曲运,第二腿关节臂44、第二齿形皮带45、联动齿形链轮42、第一腿关节臂43组成多节联动机构,第二伸缩推杆41驱动根部第二腿关节臂44移动,从而带动多节联动机构弯曲运动,来驱动第二腿关节臂44和第一腿关节臂43弯曲移动,机器人腿部转动,在上身结构46的支撑下,第五减速电机47驱动第五回转支撑48转动,来驱动主体结构49转动,主体结构49带动腿部转动,机器人上身结构采用重型钢结构设计,中部位置中空,便于人员进出施工,内设爬梯50,方便安装设备、桥架线缆等,升降悬臂梁51采用钢板框架结构,确保主体结构的刚度和可靠性,采用中空核动力显示屏54设计,外圈圆环显示核动力图像,中空区域53用于布置灯光、喷雾、烟花等特效演出装置,所有运动均采用可靠、简单、耐用的机械机构和结构实现,用最简单的实现方式制作演出效果最佳的机器人,机器人运动机构和结构完整,能够实现完整人体的常规动作,机器人整体完整性好,目前国内没有实际建设制造大型机甲战士机器人的案例,此机器人填补国内演出行业在机甲战士方面建设制造的空白,来完成机器人的使用工作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1