包含具有绝缘双层的电极的人工肌肉驱动器的制作方法
1.本说明书大体上涉及人工肌肉驱动器,并且更具体地,涉及包括绝缘双层的人工肌肉驱动器。
背景技术:
2.基于静电的人工肌肉,例如更具体地hasel人工肌肉是有前景的驱动器技术。一种特别的人工肌肉设计描述于e.acome、s.k.mitchell、t.g.morrissey、m.b.emmett、c.benjamin、m.king、m.radakovitz和c.keplinger的题目为“hydraulically amplified self-healing electrostatic actuators with muscle-like performance”的论文(science,2018年1月5日:第359卷,第6371期,第61-65页)。然而,对于实际应用而言,人工肌肉设计需要在较低的施加电压下发挥较大的力。
3.因此,存在对于能够施加提高的驱动力的改进的人工肌肉的需要。
技术实现要素:
4.在一个实施方案中,人工肌肉驱动器包括:壳体、容纳在壳体内的电介质流体和位于壳体中的电极对。电极对包括第一电极和第二电极。第一电极和第二电极各自包括金属膜。第一电极包括以面对第二电极的取向设置在第一电极的金属膜上的绝缘双层。另外,绝缘双层包括在金属膜上设置的丙烯酸和/或丙烯酸酯系聚合物层和在丙烯酸和/或丙烯酸酯系聚合物层上设置的双向拉伸聚丙烯(bopp)层。
5.在另一实施方案中,人工肌肉驱动器包括:具有与可扩张的流体区域相邻的电极区域的壳体、容纳在壳体内的电介质流体和位于壳体的电极区域中的电极对。电极对包括第一电极和第二电极。第一电极和第二电极各自包括金属膜和在金属膜上设置的绝缘双层。第一电极的绝缘双层以面对第二电极的取向设置在第一电极的金属膜上。第二电极的绝缘双层以面对第一电极的取向设置在第二电极的金属膜上。绝缘双层包括在金属膜上设置的丙烯酸和/或丙烯酸酯系聚合物层和在丙烯酸和/或丙烯酸酯系聚合物层上设置的双向拉伸聚丙烯(bopp)层。此外,电极对在响应施加的电压时靠拢,将电介质流体推入可扩张的流体区域从而使可扩张的流体区域液压地膨胀。
6.在又一实施方案中,驱动人工肌肉驱动器的方法包括:使用与人工肌肉驱动器的电极对电连接的电压源产生电压,该人工肌肉驱动器还包括具有电极区域和可扩张的流体区域的壳体。电介质流体容纳在壳体内。电极对位于壳体的电极区域中。电极对包括第一电极和第二电极,第一电极和第二电极各自具有金属膜。第一电极包括以面对第二电极的取向设置在第一电极的金属膜上的绝缘双层。绝缘双层包括在金属膜上设置的丙烯酸和/或丙烯酸酯系聚合物层和在丙烯酸和/或丙烯酸酯系聚合物层上设置的双向拉伸聚丙烯(bopp)层。该方法还包括:向电极对施加由电压源产生的电压,由此使第一电极和第二电极静电地靠拢,将电介质流体推入可扩张的流体区域从而使可扩张的流体区域液压地膨胀。该方法可进一步包括:从电极对去除电压,从而去除在电极对之间的静电吸引使得电介质
流体流动离开可扩张的流体区域。
7.结合附图,根据以下详细描述,由本文描述的实施方案提供的这些和附加的特征将被更全面地理解。
附图说明
8.附图中列出的实施方案本质上是说明性和示例性的,并且不意图限制由权利要求书限定的主题。当结合以下附图理解时,可理解说明性实施方案的以下详细描述,附图中用相同的附图标记表示相同的结构并且其中:
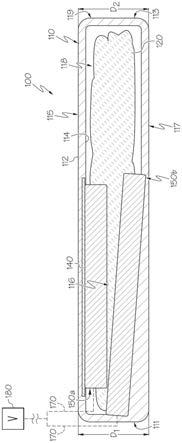
9.图1a示意性示出根据本文显示和描述的一种或多种实施方案的一例人工肌肉驱动器在未驱动状态下的剖视图;
10.图1b示意性示出根据本文显示和描述的一种或多种实施方案的图1a的人工肌肉驱动器在驱动状态下的剖视图;
11.图2a示意性示出根据本文显示和描述的一种或多种实施方案的另一例人工肌肉驱动器在未驱动状态下的剖视图;
12.图2b示意性示出根据本文显示和描述的一种或多种实施方案的图2a的人工肌肉驱动器在驱动状态下的剖视图;
13.图3示意性示出根据本文显示和描述的一种或多种实施方案的可在图1a-2b的人工肌肉驱动器中使用的一例电极对的剖视图;
14.图4示意性示出根据本文显示和描述的一种或多种实施方案的可在图1a-2b的人工肌肉驱动器中使用的另一例电极对的剖视图;和
15.图5图像化示出根据本文显示和描述的一种或多种实施方案的击穿电压/一例电极绝缘材料的厚度。
具体实施方式
16.大体上参考附图,本公开的实施方案涉及人工肌肉驱动器,其具有在具有电介质流体的壳体中设置的电极对。在操作中,可向电极对施加电压,使电极对靠拢,这引导电介质流体进入壳体的可扩张的流体区域,使壳体的可扩张的流体区域扩张。该扩张可在许多不同的场景(例如机器人、医疗设备、车辆等)施加驱动力。此外,电极对的至少一个电极包含绝缘双层。特别地,电极对的至少一个电极的绝缘双层包含丙烯酸和/或丙烯酸酯系聚合物层(例如聚(丙烯酸乙酯丙烯酰胺))和双向拉伸聚丙烯(bopp)层。丙烯酸和/或丙烯酸酯系聚合物层设置在电极的金属膜上,且bopp层设置在丙烯酸和/或丙烯酸酯系聚合物层上。本文描述的电极的绝缘双层具有高的击穿电压/厚度,并且因此促进形成耐高电压电击穿并由此可在高电压下工作的薄的人工肌肉驱动器,从而促进提高可实现的驱动力。现在将描述具有带绝缘双层的电极的人工肌肉驱动器的实施方案,并且只要有可能将在整个附图中使用相同的附图标记以指代相同或相似的部分。
17.现在参考图1a-2b,示出在未驱动状态(图1a和2a)和驱动状态(图1b和2b)下的人工肌肉驱动器100、100’的实施方案。人工肌肉驱动器100、100’包含壳体110和在壳体110内设置的电极对150。电极对150包含第一电极150a和第二电极150b。在与壳体110的可扩张的流体区域118相邻的壳体110的电极区域116内配置包括第一电极150a和第二电极150b的电
极对150。在图1a和1b所示的人工肌肉驱动器100的实施方案中,电极区域116设置在壳体110的第一端111,且可扩张的流体区域118设置在壳体110的第二端113。在图2a和2b所示的人工肌肉驱动器100’的实施方案中,电极区域116居中地设置在位于壳体110的第一端111和第二端113两者的可扩张的流体区域118之间。应理解,人工肌肉驱动器100、100’提供可包括本文描述的电极设计的人工肌肉的非限制性实例。即,以下关于图3-5更详细地描述的包括金属膜252及具有丙烯酸和/或丙烯酸酯系聚合物层256和双向拉伸聚丙烯(bopp)层258的绝缘双层254的电极250a、250b、350a、350b。
18.在一些实施方案中,壳体110包含柔性材料并且是柔性壳体。例如,柔性壳体可包含弹性体材料使得其为弹性体壳体。壳体110包含与内表面114相对的外表面112,并且由一个或多个壁(其可连接在一起或彼此成一体)形成。例如,壳体110包含与第二壁117相对的第一壁115(在图1a-2b的人工肌肉驱动器100和100’中描述)和在壳体110的第一端111和第二端113两者处在第一壁115和第二壁117之间延伸的侧壁119(在图1a和1b的人工肌肉驱动器100中描述)。
19.仍参考图1a-2b,第一电极150a和第二电极150b的一者是带负电的电极,且第一电极150a和第二电极150b的另一者是带正电的电极。出于本文讨论的目的,任一电极150a、150b可带正电,只要人工肌肉驱动器100、100’内的另一电极150a、150b带负电。人工肌肉驱动器100的电极对150与电压源180例如使用导线170电连接。在操作中,向电极对150施加由电压源180产生的电压形成横跨第一电极150a和第二电极150b的电势。该电势在第一电极150a和第二电极150b之间引起静电吸引,使第一电极150a和第二电极150b靠拢。
20.除了电极对150之外,壳体110容纳电介质流体120。不意图受理论的束缚,电介质流体120是以最小以至不导电的方式传输电力并且因此具有低电导率的介质或材料。电介质流体120的一些非限制性实例包括全氟烷烃、变压器油和去离子水。电介质流体120使电极对150之间不需要的放电(即短路)最小化。另外,当人工肌肉驱动器100、100’处于未驱动状态时(图1a和2a),电介质流体120设置在第一电极150a和第二电极150b之间。当向电极对150施加电压时,第一电极150a和第二电极150b靠拢从而驱动人工肌肉驱动器100、100’并将电介质流体120推入壳体110的可扩张的流体区域118。
21.在图1a所示的人工肌肉驱动器100的未驱动状态下,电极区域116具有与可扩张的流体区域118的高度基本上相等的高度。在图1b所示的人工肌肉驱动器100的驱动状态下,可扩张的流体区域118具有大于电极区域116的高度。在未驱动状态下(图1a),沿着壳体110的第一壁115和第二壁117两者的壳体110的外表面112是平坦的且基本上彼此平行。更具体地,在电极区域116内沿着第一壁115和第二壁117之间的壳体110的外表面112的第一距离d1与在可扩张的流体区域118内沿着第一壁115和第二壁117之间的壳体110的外表面112的第二距离d2基本上相等。在驱动状态下(图1b),第一电极150a和第二电极150b彼此接触。
22.因此,第一电极150a和第二电极150b现在基本上彼此平行。然而,当在驱动状态下时,电极区域116内沿着壳体110的第一壁115的外表面112不平行于沿着壳体110的第二壁117的外表面112。更具体地,在电极区域116内沿着第一壁115的外表面112和沿着第二壁117的外表面112之间的第一距离d1小于在可扩张的流体区域118内沿着第一壁115的外表面112和沿着第二壁117的外表面112之间的第三距离d3。第二距离d2和第三距离d3之间的差通过位移的电介质流体120限定可扩张的流体区域118内壳体110的第一壁115的扩张量。
23.在一些实施方案中,如图1a和1b所示,布置第一电极150a和第二电极150b使得在第一电极150a和第二电极150b之间的距离与壳体的第二端113相比在壳体110的第一端111更靠近。这将第一电极150a和第二电极150b定位成锐角或v形构造。结果是,当驱动时,将电极150a、150b构造为彼此拉锁式靠近,将电介质流体120推向壳体110的第二端113和可扩张的流体区域118。这将电介质流体120从壳体110的第一端111推向第二端113并推入可扩张的流体区域118。在可扩张的流体区域118中,来自电介质流体120的抵靠壳体110的第一壁115(和/或第二壁117)的压力使第一壁115(和/或第二壁117)变形(即扩张)。一旦施加至第一电极150a和第二电极150b的电压不连续,电极150a、150b回到它们的初始位置(图1a中的不平行位置)并且沿着第一壁115和第二壁117两者的外表面112回到它的初始位置(图1a中的平行位置)。在一些实施方案中,如图1a和1b所示,在第一电极150a和壳体110的第一壁115之间提供加强膜140。当在未驱动状态和驱动状态之间工作并且第一电极150a朝向第二电极150b和第二壁117移动时,加强膜140为第一壁115的至少一部分提供刚性。在一些实施方案中,加强膜140可为乙酸纤维薄膜。
24.现在参考图2a和2b,人工肌肉驱动器100’的驱动类似于图1a和1b的人工肌肉驱动器100的驱动。然而,在图2a和2b中,电极150a、150b在未驱动状态(图2a)和驱动状态(图2b)下基本上平行。在图2a和2b中使电极150a、150b静电地靠拢将电介质流体从电极区域116向外引导进入一个或多个可扩张的流体区域118,使可扩张的流体区域118扩张。应理解,包括图2a和2b以说明可包括本文描述的电极设计的人工肌肉驱动器的另一设计。即,以下关于图3-5更详细地描述的包括金属膜252及具有丙烯酸和/或丙烯酸酯系聚合物层256和双向拉伸聚丙烯(bopp)层258的绝缘双层254的电极250a、250b、350a、350b。
25.现在参考图3和4,示意性示出可在图1a-2b的人工肌肉驱动器100、100’中使用的电极对的两种实施方案。图3示出第一电极250a和第二电极250b,且图4示出第一电极350a和第二电极350b。图3的电极250a、250b和图4的电极350a、350b都包含金属膜252和在金属膜252上设置的绝缘双层254。此外,构造图3的电极250a、250b和图4的电极350a、350b使得第一电极250a、350a的绝缘双层254以面对第二电极250b、350b的取向设置在第一电极250a、350a的金属膜252上。作为一例,在图3中,第一电极250a的绝缘双层254包围第一电极250a的金属膜252并且由此第一电极250a的绝缘双层254的一部分面向第二电极250b。在图3中,第二电极250b也包含部位第二电极250b的金属膜252的绝缘双层254并且由此第二电极250b的绝缘双层254的一部分面向第一电极250a。作为另一例,在图4中,第一电极350a的绝缘双层254设置在面向第二电极350b的第一电极350a的金属膜252的表面上但不包围金属膜252。在图4中,第二电极250b同样包含设置在面向第一电极350a的第二电极250b的金属膜252的表面上但不包围金属膜252的绝缘双层254。
26.此外,尽管图3的电极250a、250b和图4的电极350a、350b都包含金属膜252和在金属膜252上设置的绝缘双层254,应理解涵盖了其中绝缘双层254设置在各电极对的两个电极250a、250b和350a、350b中的仅一个上的实施方案。确实,单个绝缘双层254若与一个电极(例如250a、350a)以面对另一电极(例如250b、350b)的取向连接,则提供在电极对(250a、250b、350a、350b)之间的绝缘分离。
27.仍参考图3和4,绝缘双层254包含在金属膜252上设置的丙烯酸和/或丙烯酸酯系聚合物层256和在丙烯酸和/或丙烯酸酯系聚合物层256上设置的双向拉伸聚丙烯(bopp)层
258。丙烯酸和/或丙烯酸酯系聚合物层256是粘附至金属膜252和bopp层258的黏合层(例如丙烯酸系黏合剂乳液)。在一些实施方案中,丙烯酸和/或丙烯酸酯系聚合物层256包含聚(丙烯酸乙酯丙烯酰胺)。然而,应理解涵盖丙烯酸和/或丙烯酸酯系聚合物材料,例如单(丙烯酸乙酯丙烯酰胺)、聚(丙烯酸甲酯丙烯酰胺)、单(丙烯酸甲酯丙烯酰胺)、聚(丙烯酸丙酯丙烯酰胺)、单(丙烯酸丙酯丙烯酰胺)、聚(丙烯酸丁酯丙烯酰胺)、单(丙烯酸丁酯丙烯酰胺)、聚(丙烯酸戊酯丙烯酰胺)、单(丙烯酸戊酯丙烯酰胺)、聚(丙烯酸己酯丙烯酰胺)、单(丙烯酸己酯丙烯酰胺)等。此外,金属膜252(其可为柔性金属膜)可包含铝或铜。然而,应理解涵盖了形成电极的任何合适的金属。另外,应理解额外的中间层可位于绝缘双层254和金属层252之间,并且额外的中间层可位于绝缘双层254和壳体110之间。
28.仍参考图3和4,绝缘层254可包含50μm以下、例如45μm以下、40μm以下、35μm以下、30μm以下、25μm以下、20μm以下、15μm以下、10μm以下、5μm以下的厚度t
bl
,或具有这些厚度中的任两个作为端点的任意范围。如图3和4所示,丙烯酸和/或丙烯酸酯系聚合物层256包含厚度t
il
和bopp层258包含厚度t
ol
。在一些实施方案中,丙烯酸和/或丙烯酸酯系聚合物层256的厚度t
il
大于bopp层258的厚度t
ol
,例如1.5-10倍厚,如2-5倍厚。
29.现在参考图5,图表20图像化示出击穿电压/实例电极绝缘材料(例如实例绝缘双层)的厚度(kv/μm)从而说明包含丙烯酸和/或丙烯酸酯系聚合物层256和bopp层258的绝缘双层254与其它绝缘材料相比的有效性。图表20包括描述击穿电压/10个比较电极绝缘材料(柱22-38)和包含丙烯酸和/或丙烯酸酯系聚合物层256和bopp层258的绝缘双层254(柱40)的厚度的11个柱(柱22-40)。
30.柱22显示(例如聚酰亚胺)与丙烯酸系黏合剂的25.4μm厚的绝缘双层具有0.22kv/μm的击穿电压/厚度。柱24显示与硅树脂黏合剂的25.4μm厚的绝缘双层具有0.22kv/μm的击穿电压/厚度。柱26显示与硅树脂黏合剂的50.8μm厚的绝缘双层具有0.18kv/μm的击穿电压/厚度。柱28显示(例如聚醚酰亚胺)与丙烯酸系黏合剂的76.2μm厚的绝缘双层具有0.16kv/μm的击穿电压/厚度。柱30显示与丙烯酸系黏合剂的127μm厚的绝缘双层具有0.1kv/μm的击穿电压/厚度。柱32显示high density(例如聚四氟乙烯(ptfe))与硅树脂黏合剂的50.8μm厚的绝缘双层具有0.2kv/μm的击穿电压/厚度。柱34显示与硅树脂黏合剂的50.8μm厚的绝缘双层具有0.18kv/μm的击穿电压/厚度。柱36显示拉伸的与硅树脂黏合剂的63.5μm厚的绝缘双层具有0.19kv/μm的击穿电压/厚度。柱38显示与硅树脂黏合剂的76.2μm厚的绝缘双层具有0.12kv/μm的击穿电压/厚度。
31.因此,由柱22-38表示的绝缘双层的每个具有0.1-0.22kv/μm的击穿电压/厚度。与此相对,柱40显示包含丙烯酸和/或丙烯酸酯系聚合物层256(具有13.4μm的厚度)和bopp层258(具有3.95μm的厚度)的19μm厚的绝缘双层254具有1.04kv/μm的击穿电压/厚度。这表明与由柱22-38表示的最好的比较绝缘体双层的击穿电压/厚度相比提高大于四倍。这也显示绝缘双层254的击穿电压/厚度是1kv/μm以上。
32.通过使用包含丙烯酸和/或丙烯酸酯系聚合物层256和bopp层258的绝缘双层254,可减小绝缘体双层254的厚度t
bl
,同时提高绝缘体双层254的电击穿电压,使得人工肌肉驱动器100、100’可在提高的电压下操作而没有短路,从而促进形成更有力的人工肌肉驱动
器。例如,绝缘双层254耐受10kv以上的击穿电压,例如11kv以上、12kv以上、15kv以上、20kv以上等。确实,绝缘双层254的提高的击穿电压/厚度允许单个绝缘双层254提供在电极对(250a、250b和350a、350b)之间充分的绝缘分离。不意图受理论的束缚,在操作中,由人工肌肉驱动器100、100’施加的驱动力与绝缘双层254的厚度t
bl
成反比并与施加的电压的平方成正比。因此,减小绝缘双层254的厚度同时使用在大的施加电压下耐受电短路的材料,例如丙烯酸和/或丙烯酸酯系聚合物层256和bopp层258,这促进提高可实现的驱动力。
33.现在应理解本文描述的实施方案涉及具有电极对的人工肌肉驱动器,其中至少一个电极包含绝缘双层,该绝缘双层包括丙烯酸和/或丙烯酸酯系聚合物层(例如聚(丙烯酸乙酯丙烯酰胺))和bopp层。绝缘双层具有高的击穿电压/厚度并因此促进形成耐高电压电击穿使得它们可在较高的电压下工作的薄的人工肌肉驱动器,从而促进提高可实现的驱动力。
34.予以说明,本文可使用术语“基本上”和“约”来表示固有的不确定性程度,其可归属于任何定量比较、值、测量结果或其它表示。本文还使用这些术语来表示在没有导致所讨论的主题的基本功能改变的情况下定量表示可从规定的参考值变化的程度。
35.虽然本文已经说明和描述了特定实施方案,但是应理解在不脱离所要求保护的主题的精神和范围的情况下可进行各种其它改变和修改。此外,虽然本文已经描述了所要求保护的主题的各个方面,但是这些方面不需要组合使用。因此,所附权利要求书旨在覆盖在所要求保护的主题的范围内的所有这样的改变和修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1