自主移动装置及仓储物流系统的制作方法
1.本发明是有关一种装置,详细来说,是有关一种自主移动装置及仓储物流系统。
背景技术:
2.目前市面上的自主移动装置,例如机器人,在进行自主移动时,会通过感测器来回避障碍物。然而,当障碍物为可移动物体,例如人或者另一台机器人时,若避障的范围太小,很可能在可移动物体开始移动时,将会撞上正在回避绕行的自主移动装置,造成人员或机器的损伤;然而对于静态物体而言,若避障范围太大又会产生不必要的绕行距离,造成自主移动装置的工作效率降低。
技术实现要素:
3.本技术公开了一种自主移动装置及仓储物流系统,通过判断障碍物是否为可移动物体来决定避障距离的技术手段来解决背景技术中的问题,借以避免因为避障距离过小而造成人员或机器的损伤的问题,同时,避免因为避障距离过大而造成自主移动装置的工作效率降低。
4.依据本发明的一实施例,公开了一种自主移动装置,所述自主移动装置包括:感测组件、处理器及驱动组件。所述感测组件用于感测物体的信息;所述处理器用于依据所述信息判断所述物体是否为可移动物体,并依据判断结果来产生控制信号,其中所述控制信号用于指示所述自主移动装置的避障距离;所述驱动组件用于驱动所述自主移动装置以进行移动,其中当所述物体位于所述自主移动装置的行进路径上时,所述驱动组件以至少所述避障距离驱动所述自主移动装置进行避障。
5.依据本发明的一实施例,当所述物体为可移动物体时的避障距离大于当所述物体为静态物体的避障距离。
6.依据本发明的一实施例,当所述物体位于所述自主移动装置的行进路径上时,所述移动组件控制所述自主移动装置以所述物体为避障中心、所述避障距离为半径的半圆弧路径作为避障路径来进行避障。
7.依据本发明的一实施例,所述感测组件包括影像传感器,所述信息是所述影像传感器捕捉所述物体的影像。
8.依据本发明的一实施例,所述处理器通过所述影像传感器于两个时间点所捕捉的影像来判断所述物体是否为可移动物体。
9.依据本发明的一实施例,所述自主移动装置还包括储存装置,用于储存对比影像。
10.依据本发明的一实施例,所述自主移动装置还包括通讯装置,用于传送所述自主移动装置的位置信息至远端伺服器,并自所述远端伺服器接收对应所述位置信息中可能的可移动物体特征,并将所述可能的可移动物体特征存入所述储存装置中以作为所述对比影像。
11.依据本发明的一实施例,所述处理器比较所述影像及所述对比影像以判断所述物
体是否为可移动物体。
12.依据本发明的一实施例,所述感测组件包括距离传感器,所述信息是所述物体与所述自主移动装置之间的距离。
13.依据本发明的一实施例,所述处理器通过所述距离传感器于两个时间点所感测的距离来判断所述物体是否为可移动物体。
14.依据本发明的一实施例,所述处理器还用于依据所述感测组件于两个时间点所感测的信息来判断所述物体的移动速度,并依据所述移动速度选择所述自主移动装置的避障路径。
15.依据本发明的一实施例,所述感测组件还用于感测所述自主移动装置的承载重量,所述处理器依据所述承载重量调整所述避障距离。
16.依据本发明的一实施例,公开一种仓储物流系统,包括多个自主移动装置及调度伺服器。所述调度伺服器用于自其中一个所述自主移动装置接收避障信息,并发送行进信号以指示所述其他自主移动装置继续行进或暂停行进。
17.本发明所公开的自主移动装置及仓储物流系统可通过感测组件及处理器判断物体是否为可移动物体,并借此决定避障距离,如此一来,可以避免因为避障距离过小而造成人员或机器的损伤的问题,同时,避免因为避障距离过大而造成自主移动装置的工作效率降低。
附图说明
18.图1是依据本发明一实施例之自主移动装置的示意图。
19.图2是依据本发明一实施例之对比影像的示意图。
20.图3是依据本发明一实施例之对物体进行判断的示意图。
21.图4是依据本发明一实施例之通讯装置与远端伺服器进行通讯的示意图。
22.图5是依据本发明一实施例之对物体进行判断的示意图。
23.图6a及图6b是依据本发明一实施例之对物体进行判断的示意图。
24.图7a及图7b是依据本发明一实施例之对物体进行判断的示意图。
25.图8a及图8b是依据本发明一实施例之选择避障距离的示意图。
26.图9a及图9b是依据本发明一实施例之避障路径的示意图。
27.图10是依据本发明一实施例之依据承载重量选择避障距离的示意图。
28.图11是依据本发明一实施例之依据物体移动速度选择避障路径的示意图。
29.图12是依据本发明另一实施例之自主移动装置的示意图。
30.图13是依据本发明一实施例之自主移动装置的方块示意图。
31.图14是依据本发明一实施例之仓储物流系统的示意图。
具体实施方式
32.以下揭示内容提供了多种实施方式或例示,其能用以实现本揭示内容的不同特征。下文所述之组件与配置的具体例子系用以简化本揭示内容。当可想见,这些叙述仅为例示,其本意并非用于限制本揭示内容。举例来说,在下文的描述中,将一第一特征形成于一第二特征上或之上,可能包括某些实施例其中所述的第一与第二特征彼此直接接触;且也
可能包括某些实施例其中还有额外的组件形成于上述第一与第二特征之间,而使得第一与第二特征可能没有直接接触。此外,本揭示内容可能会在多个实施例中重复使用组件符号和/或标号。此种重复使用乃是基于简洁与清楚的目的,且其本身不代表所讨论的不同实施例和/或组态之间的关系。
33.再者,在此处使用空间上相对的词汇,譬如「之下」、「下方」、「低于」、「之上」、「上方」及与其相似者,可能是为了方便说明图中所绘示的一组件或特征相对于另一或多个组件或特征之间的关系。这些空间上相对的词汇其本意除了图中所绘示的方位之外,还涵盖了装置在使用或操作中所处的多种不同方位。可能将所述设备放置于其他方位(如,旋转90度或处于其他方位),而这些空间上相对的描述词汇就应该做相应的解释。
34.虽然用以界定本技术较广范围的数值范围与参数皆是约略的数值,此处已尽可能精确地呈现具体实施例中的相关数值。然而,任何数值本质上不可避免地含有因个别测试方法所致的标准偏差。在此处,「约」通常系指实际数值在一特定数值或范围的正负10%、5%、1%或0.5%之内。或者是,「约」一词代表实际数值落在平均值的可接受标准误差之内,视本技术所属技术领域中具有通常知识者的考虑而定。当可理解,除了实验例之外,或除非另有明确的说明,此处所用的所有范围、数量、数值与百分比(例如用以描述材料用量、时间长短、温度、操作条件、数量比例及其他相似者)均经过「约」的修饰。因此,除非另有相反的说明,本说明书与附随申请专利范围所揭示的数值参数皆为约略的数值,且可视需求而更动。至少应将这些数值参数理解为所指出的有效位数与套用一般进位法所得到的数值。在此处,将数值范围表示成由一端点至另一端点或介于二端点之间;除非另有说明,此处所述的数值范围皆包括端点。
35.市面上的自主移动装置,如机器人,在进行回避障碍物时,皆以固定模式进行避障,然而,当障碍物是可移动物体,如人、动物或机器人时,若自主移动装置采取与障碍物是静态物体时相同的避障模式,一旦可移动物体与自主移动装置同时进行移动,可能造成自主移动装置闪避不及,进而造成人员或装置的损伤。另一方面,若设定自主移动装置不论障碍物是可移动物体或静态物体,皆以较大的避障距离进行避障,将使得自主移动装置花费较多时间进行避障,造成工作效率降低。据此,本发明公开一种自主移动装置及仓储物流系统,通过感测组件及处理器判断物体是否为可移动物体,并借此决定避障距离,如此一来,可以避免因为避障距离过小而造成人员或机器的损伤的问题,同时,避免因为避障距离过大而造成自主移动装置的工作效率降低。
36.在本发明中,自主移动装置可以是应用于仓储物流系统中用于承载货物的无人物流车,或者,具有自主移动功能的行李箱。然而只要是应用本发明所公开之技术方案的自主移动装置,皆应隶属于本发明的范畴。需说明的是,在本发明中,可移动物体可以是已经在动态运动中的人、动物、机械装置或物体、或者,可随时进行运动但暂时静止的人、动物或机械装置。
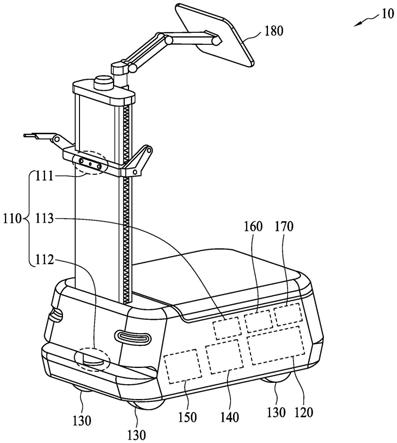
37.图1是依据本发明一实施例之自主移动装置10的示意图。在本实施例中,自主移动装置10是一种用于承载货物的无人物流车。自主移动装置10包括感测组件110、处理器120及驱动组件130。感测组件110包括设置于自主移动装置10前方的影像传感器111以及距离传感器112。影像传感器111用于捕捉物体的影像。距离传感器112用于感测物体与自主移动装置10间的距离。为了有效地使自主移动装置10避开物体,感测组件110可用于感测物体的
信息,其中物体信息可以是影像传感器111所捕捉的物体影像,或是距离传感器112所感测的物体与自主移动装置10间的距离,或者两者的结合。需注意的是,在其他实施例中,感测组件110还可以包括其他感测器以实现自主移动装置10的其他功能。可选地,感测组件110还可包括重量感测器113,其用于感测自主移动装置10的承载重量。在本实施例中,影像传感器111可以用一般的相机来实现,距离传感器112可以用深度相机(或称为rgbd相机)、激光雷达(light laser detection and ranging,lidar)、超声传感器、红外传感器的其中之一或其中多项的组合来实现,本发明并不以此为限。
38.处理器120设置于自主移动装置10中,是用于依据感测组件110所感测到的物体信息,如前述物体影像或物体与自主移动装置间的距离,来判断物体是否为可移动物体,并依据判断结果产生控制信号。控制信号用于指示自主移动装置10针对物体的避障距离。驱动组件130用于驱动自主移动装置10以进行移动,其中当物体位于自主移动装置10的行进路径上时,驱动组件130以至少避障距离来进行避障。在本实施例中,驱动组件130包括马达(图未示)以及图1中所示的动力轮,所述马达提供动能至动力轮来驱动自主移动装置10。
39.需说明的是,自主移动装置10还可包括其他组件、元件来实现自主移动装置10的其他功能。如图1所示,自主移动装置10还包括用于储存信息的储存装置140、用于与远端伺服器通讯的通讯装置150、用于提供功率的电池160、将功率分配至各个部件的功率分配模组170以及用于显示信息的显示屏180。
40.需注意的是,图1所示的自主移动装置10仅为范例说明,本发明并不限制自主移动装置10的详细架构,特别的是,本发明并不限制图1所示元件如影像传感器111及距离传感器112设置于自主移动装置10上的位置。在其他实施例中,自主移动装置10可以包括多个影像传感器111以及多个距离传感器112,分别分布在自主移动装置10的不同位置,以感测多方位的物体信息。影像传感器111及距离传感器112的详细设置位置取决于实际设计需要。
41.图2至图5描述当物体出现在影像感测器111的感测范围内时,处理器120通过影像传感器111捕捉的物体影像以获得物体外观特征,并借此判断物体是否是可移动物体的实施例。详细来说,在图2及图5实施例中,处理器120是搭配影像传感器111以及储存装置140来判断物体是否为可移动物体。
42.如前所述,储存装置140可用于储存信息。举例来说,储存装置140可用于可以储存自主移动装置10的位置信息、所在位置的地图信息、自主移动装置10的任务信息等等。特别地,储存装置140可用于储存对比影像。详细来说,储存装置140可以在自主移动装置10出厂前就先储存特定物体的影像及外观特征信息作为对比影像,举例来说,储存装置140可事先储存如图2所示的人体或动物的骨架及外观特征信息作为对比影像。在如此设置下,当物体出现在影像感测器111的感测范围时,处理器120可以通过比较影像感测器111捕捉的物体影像以及储存装置140中的对比影像来判断物体是否是人体或动物等的可移动物体。参考图3,当图3中的物体(人)出现在影像传感器111的感测范围时,影像感测器111捕捉物体(人)的影像。由于储存装置140已事先储存特定物体的影像及外观特征信息作为对比影像,因此,处理器120可通过比较影像传感器111所捕捉的物体(人)影像以及事先储存在储存装置140中的对比影像,并借此判断物体是人体。
43.在其他实施例中,储存装置140还可储存其他可移动物体的影像及外观特征作为对比影像。举例来说,储存装置140还可储存其他自主移动装置或已知的机械装置的影像,
以供处理器120判断,本发明并不以图2所示为限。
44.在图2及图3的实施例中,储存装置140所储存的对比影像为事先所储存,然而,此并非本发明的一限制。在其他实施例中,自主移动装置10可通过通讯装置150与云端伺服器或远端伺服器进行通讯,以实时地更新储存装置140中的对比影像。参考图4,自主移动装置10通过通讯装置150将自主移动装置10的位置信息传送至远端伺服器20,远端伺服器20依据自主移动装置10的位置,回传特征信息至自主移动装置10,其中特征信息包括了自主移动装置10的所在位置中可能的可移动物体的影像及外观特征信息。自主移动装置10将特征信息存入储存装置140中作为对比影像。在如此设置下,当物体出现在影像感测器111的感测范围时,处理器120可以通过比较影像感测器111捕捉的物体影像以及储存装置140中的对比影像来判断物体是否是人体或动物等的可移动物体。举例来说,若自主移动装置10的位置信息指示自主移动装置10位在一仓库中,则远端伺服器20可以回传其他自主移动装置或机械装置的特征信息。以另一例子而言,若自主移动装置10的位置信息指示自主移动装置10位在一机场中,则远端伺服器20可以回传如机场载人车、清扫车等装置的特征信息。
45.在其他实施例中,在无法通过上述实施例的方式来判断物体时,自主移动装置10还可以及时地与远端伺服器20进行通讯来进行判断。参考图5,当物体30出现在影像传感器111的感测范围时,影像传感器111捕捉物体30的影像。然而,处理器120无法通过目前储存装置140中的对比影像来判断物体30是否为可移动物体。据此,自主移动装置10通过通讯装置150与远端伺服器20进行通讯,通讯装置150将自主移动装置10的位置信息传送至远端伺服器20后,自远端伺服器20接收所在位置中可能的可移动物体的影像及外观特征,并存入储存装置140作为对比影像。处理器120再依据图2及图3所示实施例的方式,比较影像传感器111与储存于储存装置140的对比影像来判断物体30是否是可移动物体。需说明的是,在其他实施例中,通讯装置150可以直接将物体30的影像传送至远端伺服器20,远端伺服器20再以人工辨识或智能辨识的方式判断物体30是否为可移动物体,并将判断结果通过通讯装置150传送至处理器120。
46.在图4及图5的实施例中,位置信息可以是自主移动装置10的ip位址、4g或5g定位信息、或是自主移动装置10的全球定位系统资讯的其中之一或者其中多个的组合,本发明并不以此为限。
47.在本发明中,自主移动装置10还可以通过其他影像辨识方式来进行判断。详细来说,当物体出现在影像传感器111的感测范围时,影像传感器111可于两个不同时间点捕捉物体的影像,以供处理器120判断物体是否是正在进行运动的可移动物体。参考图6a及图6b,图6a及图6b分别是影像传感器111于两个不同时间点所捕捉的物体影像。在图6a中,影像传感器111于第一时间点捕捉物体的第一张影像。在图6b中,影像传感器111于第二时间点捕捉物体的第二张影像。影像传感器111将两张影像传至处理器120,处理器120依据两个时间点所捕捉的影像来判断物体是否为可移动物体。详细来说,处理器120自图6a所示的影像中截取物体(球)相对于影像中多个特征点的距离。在本实施例中,特征点可以是背景中货架的各个端点。接着,处理器120自图6b所示的影像中截取物体(球)相对于同样的特征点的距离,并判断在两个时间点内,物体(球)相对于多个特征点的相对距离是否有改变,若有,则判断物体(球)为正在运动中的可移动物体;否则,判断物体(球)为静态物体。
48.需说明的是,若自主移动装置10正在移动,在截取物体(球)与影像中特征点的距
离时,处理器120会同时校正因自主移动装置10移动所造成的误差,使得判断更加精准。
49.在本发明中,自主移动装置10还可以通过感测物体与自主移动装置10间的相对距离来判断物体是否是可移动物体。详细来说,当物体出现在距离传感器112的感测范围时,距离传感器112可于两个不同时间点感测物体与自主移动装置10间的距离,以供处理器120判断物体是否是正在进行运动的可移动物体。参考图7a及图7b,图7a及图7b分别描绘距离传感器112于两个不同时间点所感测到的物体与自主移动装置10间的距离。在图7a中,距离传感器112于第一时间点感测物体(球)与自主移动装置10间的距离。在图7b中,距离传感器112于第二时间点感测物体(球)与自主移动装置10间的距离。距离传感器112将两个时间点所感测到的距离传至处理器120,处理器120依据两个时间点所感测到的距离来判断物体是否为可移动物体。详细来说,在图7a所示的时间点中,距离传感器112感测物体(球)与自主移动装置10的距离,并且同时感测背景物(如后方货架)与自主移动装置10的距离。接着,在图7b所示的时间点中,距离传感器112再次感测物体(球)与自主移动装置10的距离,同时感测背景物(如后方货架)与自主移动装置10的距离。处理器120以背景物(如后方货架)与自主移动装置10的距离作为基准,判断在两个时间点内物体(球)与自主移动装置10之间的相对距离是否有改变,若有,则判断物体(球)为正在运动中的可移动物体;否则,判断物体(球)为静态物体。
50.需说明的是,若自主移动装置10正在移动,在感测物体(球)与自主移动装置10间的距离时,处理器120会同时校正因自主移动装置10移动所造成的误差,使得判断更加精准。
51.另外,上述实施例分别说明以影像传感器111或距离传感器112来进行感测以获得物体的信息,并使得处理器120可据此判断物体是否为可移动物体。本领域具有通常知识者应能轻易理解,自主移动装置10可以结合影像传感器111以及距离传感器112共同进行感测,以获得更精准的判断结果。
52.处理器120依据上述实施例的方式判断物体是否为可移动物体后,若物体位在自主移动装置10的行进路径上,则依据物体是否为可移动物体选择性地以不同的避障距离进行避障。详细来说,若处理器120判断物体是可移动物体,则以较大的避障距离进行避障,以避免因为物体的移动使得自主移动装置10闪避不及,进而造成的人员及装置的损伤;反之,若处理器120判断物体是静态物体,则以较小的避障距离进行避障,以缩短自主移动装置10的避障时间,提升自主移动装置10的工作效率。
53.参考图8a,在图8a的实施例中,当处理器120通过上述实施例判断物体81为静态物体时,自主移动装置10仅需以较小的避障距离d1进行避障。因此,处理器120发出控制信号,使得驱动组件130以物体81为中心、避障距离d1为半径的半圆弧避障路径进行避障。参考图8b,在图8b的实施例中,当处理器120通过上述实施例判断物体82为可移动物体时,自主移动装置10需要以较大的避障距离d2进行避障以策安全。因此,处理器120发出控制信号,使得驱动组件130以物体82为中心、避障距离d2为半径的半圆弧避障路径进行避障。
54.在图8a及图8b的实施例中,自主移动装置10以半圆弧避障路径进行避障。然而,自主移动装置10采取的避障方式并非本发明的一限制,在其他实施例中,自主移动装置10可以采取其他避障路径进行避障。参考图9a,当处理器120通过上述实施例的方式判断物体82为可移动物体时,自主移动装置10需以避障距离d2进行避障以策安全。接着,处理器120发
出控制信号,使得驱动组件130以直线避障的方式绕过物体82。参考图9b,当处理器120通过上述实施例判断物体82为可移动物体时,自主移动装置10需以避障距离d2进行避障以策安全。接着,处理器120发出控制信号,使得驱动组件130以直角转弯的方式绕过物体82。在图9a及图9b的实施例中,自主移动装置10与物体82之间的距离自始大于避障距离d2,避免物体82的突然移动造成人员及装置的损伤。
55.在本发明中,自主移动装置10可以依据地形、通道宽度、行进路径上障碍物数量等因素判断应该采取何种避障方式来进行避障。在某些实施例中,自主移动装置10采取可以最快避障提升工作效率的方式进行避障。在某些实施例中,自主移动装置10以最能确保人员安全的方式进行避障。本发明并不以此为限。
56.在本发明中,自主移动装置10可以用于承载货物,当自主移动装置10所承载的重量较重时,与人员或其他装置的碰撞将造成更严重的损伤。如图1实施例所述,重量感测器113用于感测自主移动装置10的承载重量。在如此设置下,处理器120依据上述实施例中感测组件110所感测到的物体信息以及自主移动装置10的承载重量选择性地选择自主移动装置10的避障距离。详细来说,当自主移动装置10所承载的重量大于预设重量时,处理器120可适时地调节避障距离,使得自主移动装置10以更大的避障距离进行避障以策安全。
57.参考图10,在图10的实施例中,自主移动装置10承载着货物移动,并在行经路径上遇到障碍物。通过上述实施例,处理器120判断物体是可移动物体,因此,自主移动装置10需以较大的避障距离d2进行避障以策安全。同时,感测组件110中的重量感测器113感测自主移动装置10的承载重量,处理器120判断此时自主移动装置10的承载重量是否大于一预设重量。若承载重量大于一预设重量,处理器120判断自主移动装置10需以避障距离d3进行避障,其中避障距离d3大于避障距离d2。若承载重量小于或等于预设重量,处理器120判断自主移动装置10以避障距离d2进行避障。
58.在某些实用情境中,由于通道宽度过窄或是障碍物数量太多等原因,使得自主移动装置无法以较大的避障距离进行避障时,在优先考量人员安全的情况下,自主移动装置10可以适时地停止行进,等待障碍物移除(如人员离开或物体被搬离)后再行行进。在某些实施例中,自主移动装置10还可包括扬声器、警示灯等组件,在自主移动装置10进行避障或无法避障时,以警示音或警示灯的方式达到警示人员的效果。
59.当物体出现在影像传感器111或距离传感器112的感测范围内时,影像传感器111或距离传感器112感测物体信息。接着,依据图6a、图6b、图7a及图7b实施例,处理器120判断物体是否是正在运动中的可移动物体。为了精确的选择避障路径,物体的移动速率及方向必须纳入考虑。参考图11,在第一时间点t1时,物体82位在影像传感器111或距离传感器112的感测范围内。同时,依据物体82所在位置,处理器120定义物体82此时的位置坐标为(p
xa,
p
ya
)。在本实施例中,物体82的坐标位置可以以自主移动装置10本身位置为原点,搭配距离传感器112所感测的物体82与自主移动装置10之间的距离加以定义。接着,物体82在第二时间点t2时,移动至位置坐标(p
xb,
p
yb
)。依据第一时间点t1与对应的坐标(p
xa,
p
ya
)以及第二时间点t2与对应的坐标(p
xb,
p
yb
),处理器120可计算出物体82的移动速率及方向。接着,处理器120依据物体82的移动速率与方向以及自主移动装置10自身的移动速率与方向,计算出物体82将会进入自主移动装置10的行进路径,并且开始准备进行避障。由于自主移动装置10可选择的避障路径有图示中的路径p1以及路径p2,处理器120依据物体82的移动速率与方
向以及自主移动装置10的移动速率,搭配两种避障路径p1与p2,选择其中一种最能保障人员安全的避障路径。以图11为例,处理器120计算得知,依据物体82的移动速率与方向以及自主移动装置10自身的移动速率,若选择避障路径p2进行避障,将会在时间点t3与物体82在坐标(p
xc,
p
yc
)的位置上碰撞。因此,处理器120选择避障路径p1进行避障,以避免与物体82的碰撞。
60.图12是依据本发明另一实施例之自主移动装置40的示意图。在本实施例中,自主移动装置40是一种具有自主移动功能的行李箱。自主移动装置40包括感测组件410、处理器420、驱动组件430、储存装置440、通讯装置450、电池460以及功率分配模组470。感测组件410包括影像传感器411、距离传感器412以及重量感测器413。在本实施例中,自主移动装置40所包括的元件的用途功能与图1所示自主移动装置10的对应元件相同。本领域具有通常知识者在阅读完上述实施例后应能轻易理解,自主移动装置40同样可应用图2至图11所公开的技术方案,详细说明在此省略以省篇幅。
61.需说明的是,在某些实施例中,自主移动装置10及自主移动装置40可以不包括重量感测器113及413,相应地,自主移动装置10及自主移动装置40可以依据自身的移动加速度以及提供给驱动组件130及430的动力计算承载重量。
62.归纳本技术的自主移动装置于图13,以方便理解本发明。图13是依据本技术实施例的自主移动装置的系统方块图,以自主移动装置10为例说明,自主移动装置10包括感测组件110、处理器120、驱动组件130、储存装置140、通讯装置150、电池160、功率分配模组170以及显示屏180。感测组件110包括影像传感器111、距离传感器112以及重量感测器113。在本实施例中,影像传感器111可以用一般的相机来实现,距离传感器112可以用深度相机、激光雷达、超声传感器、红外传感器的其中之一或其中多项的组合来实现。感测组件110与处理器120(例如是中央处理单元cpu)电性连接。感测组件110将所感测到的物体信息传送至处理器120。处理器120依据物体信息判断物体是否是可移动物体,并发出控制信号。驱动组件130与处理器120电性连接,其用于驱动自主移动装置10进行移动,当物体位在自主移动装置10的行进路径上时,驱动组件130依据控制信号指示的避障距离进行避障。驱动组件130包括马达以及动力轮。
63.储存装置140用于储存信息,例如,可移动物体特征信息、静态物体特征信息、自主移动装置10的位置信息、所在位置的地图信息、自主移动装置10的任务信息、货架信息等等。通讯装置150用于与云端伺服器或远端伺服器进行通讯,以更新储存装置140中的可移动物体特征信息或接收远端伺服器对于物体的判断结果。储存装置140、通讯装置150与处理器120电性连接。显示屏180用于显示信息。功率分配模组170与自主移动装置10的各部件电性连接,其用于将电池160所提供的功率分配至各个部件。
64.图14是依据本发明一实施例之仓储物流系统50的示意图。仓储物流系统50包括调度伺服器60、自主移动装置71、72、73及74。在本实施例中,自主移动装置71、72、73及74可以以图1所示的自主移动装置10来实现。在本实施例中,仓储物流系统50用于通过调度伺服器60控制自主移动装置71、72、73及74在货架间的行进。详细来说,依据图2至图11的实施例,当判断物体是可移动物体或静态物体后,自主移动装置将会采取不同的避障距离。然而,一般仓库中货架间的距离有所限制,因此,自主移动装置在进行避障时可能进入其他自主移动装置的行进路径,进而造成自主移动装置彼此碰撞。在本实施例中,调度伺服器60接受来
自自主移动装置的避障信息后,依据货架间的距离、自主移动装置所采取的避障距离、自主移动装置间的速度与距离等因素,进行自主移动装置的调度,安排其他自主移动装置继续行进或停止行进,避免自主移动装置彼此碰撞。
65.如图14所示,自主移动装置72在行进路径上遇到物体81,依据图2至图11的实施例,自主移动装置72判断物体81是静态物体,因此选择以较小的避障路径d1进行避障。自主移动装置72将即将以避障路径d1进行避障的避障信息传送至调度伺服器60。依据货架间的距离、避障距离d1、自主移动装置71与72的速度与距离等因素,调度伺服器60判断自主移动装置72进行避障时将不会与自主移动装置71碰撞。因此,调度伺服器60发送信号至自主移动装置71,指示在自主移动装置72可以继续行进。
66.另一方面,自主移动装置74在行进路径上遇到物体82,依据图2至图11的实施例,自主移动装置74判断物体82是可移动物体,因此选择以较大的避障路径d2进行避障以策安全。自主移动装置74将即将以避障路径d2进行避障的避障信息传送至调度伺服器60。依据货架间的距离、避障距离d2、自主移动装置73与74的速度与距离等因素,调度伺服器60判断自主移动装置74进行避障时将会进入自主移动装置73的行进路径。因此,调度伺服器60发送信号至自主移动装置73以指示自主移动装置73停止行进,等待自主移动装置74完成避障后再前进。
67.上文概述若干实施例的特征,使得所属领域的技术人员可较佳理解本技术的方面。所属领域的技术人员应了解,其可容易使用本技术作为用于设计或修改用于实行相同目的及/或实现本文中介绍的实施例的相同优点的其它工艺及结构的基础。所属领域的技术人员还应意识到,这些等效构造不脱离本揭露的精神及范围且其可在本文中做出各种改变、替代及更改而不脱离本揭露的精神及范围。
68.再者,本技术的范围不旨在限于本说明书中描述的工艺、机器、制造、物质组成、构件、方法及步骤的特定实施例。所属领域的一般技术人员将根据本揭露的揭示内容容易了解,可根据本揭露利用大体上执行与本文中描述的对应实施例相同的功能或大体上实现与其相同的结果的目前存在或后续发展的工艺、机器、制造、物质组成、构件、方法或步骤。因此,随附权利要求书旨在将这些工艺、机器、制造、物质组成、构件、方法或步骤包含于其范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1