一种液压扭矩扳手反作用力臂支点定位支架的制作方法
1.本发明涉及一种用于电机装配领域的液压扭矩扳手反作用力臂支点定位支架。
背景技术:
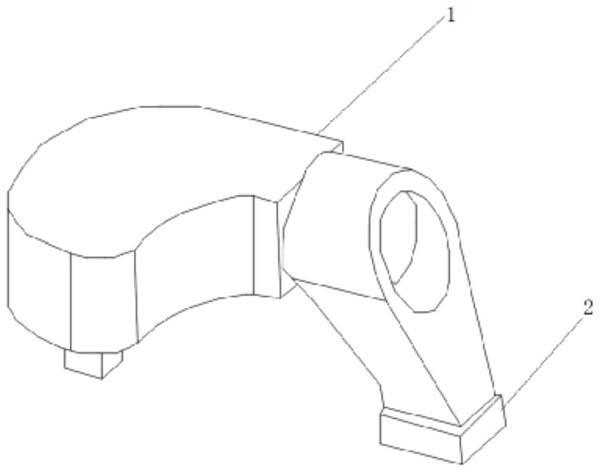
2.对于磁极螺钉紧固力矩在6000nm左右的大型同步凸极式磁极极靴板,紧固时采用常规扭矩扳手即可,不存在反作用力臂支点问题。而对于磁极螺钉紧固力要求达到12000nm的凸极式磁极极靴板,常规扭矩扳手无法满足力矩要求,磁极螺钉的紧固采用方驱液压扭矩扳手以满足大的预紧力要求。请参阅图1,方驱液压扭矩扳手1在使用时,需利用反作用力臂支点2实现整个扳紧过程。
3.请参阅图2,根据方驱液压扭矩扳手的力臂长度尺寸,其在紧固磁极螺钉时,可用相邻对角的未旋紧到底的磁极螺钉3作为支点。但此种方式存在一些缺陷。一方面根据工艺要求在紧固磁极螺钉时,须从中间向两边对称扳紧,依次类推,因此会出现两端最外侧的螺钉在紧固时无可利用的支点作为支撑的情况;另一方面考虑到螺钉紧固预紧力较大,紧固作业时对作为支点的磁极螺钉势必造成一定影响,即使采用工装螺钉替代产品螺钉作为支点,也无法排除对磁轭上螺孔螺纹产生的影响,同时会增加旋紧和拆除螺钉的工作量;另外,此种方式方驱液压扭矩扳手操作时稳定性较差,对输入至磁极螺钉上的扭矩存在不确定因素。
技术实现要素:
4.本发明的目的是为了克服现有技术的不足,提供一种液压扭矩扳手反作用力臂支点定位支架,它能够为方驱液压扭矩扳手在进行大扭矩紧固作业时提供反作用力臂支点。
5.实现上述目的的一种技术方案是:一种液压扭矩扳手反作用力臂支点定位支架,包括设置于极靴板上的定位模块和垫条;
6.所述定位模块由主体模块与位于主体模块两侧的侧围组成,所述主体模块的下表面为弧形,其弧度的半径与所述极靴板一致,所述主体模块的上表面对称的设有台阶结构,所述主体模块的宽度与所述极靴板的宽度匹配,所述侧围上开设有定位槽和定位螺孔,所述垫条的形状与所述定位槽的形状匹配;
7.所述定位模块可前后滑动的跨接于所述极靴板上,其横向位移受到所述的侧围的限位,在选定定位位置后,在所述定位槽内插接所述垫条,并通过螺栓对所述垫条及所述定位模块进行固定。
8.进一步的,所述定位槽为t型槽,其窄头侧指向所述极靴板,所述垫条为与之匹配的t型垫条。
9.进一步的,所述主体模块的上表面的台阶结构的连接部进行倒角。
10.进一步的,所述主体模块的上表面的台阶结构上设有吸铁钻连接结构。
11.本发明的一种液压扭矩扳手反作用力臂支点定位支架具有如下优势:
12.1.解决反作用力臂支点问题。支点定位支架有效的解决了因液压扭矩扳手使用时
所必须的支点问题,采用该工装作为支点,避免了使用磁极螺钉作为支点对螺纹造成的不确定性,保证了方驱液压扳手在使用时的可靠性、稳定性和方便性。对现有技术是一次重大突破。
13.2.使用方便。根据工艺要求,极靴板上螺栓较多时,在扳紧时须从中间向两端扳紧进行。此工装可沿极靴板来回移动,解决极靴板上全部磁极螺钉(包括两端最外侧磁极螺钉)的紧固。给整个紧固过程带来极大方便,减少操作的工作量。
14.3.极靴板安装后磁极螺钉与极靴板需配钻锥端螺钉,此工装还可作为吸铁钻的固定面,为后续作业提供便捷。
附图说明
15.图1为方驱液压扭矩扳手的结构示意图;
16.图2为现有技术中方驱液压扭矩扳手将磁极螺钉作为支点的示意图;
17.图3为本发明的一种液压扭矩扳手反作用力臂支点定位支架;
18.图4为应用本发明的液压扭矩扳手反作用力臂支点定位支架作为方驱液压扭矩扳手支点的示意图。
具体实施方式
19.为了能更好地对本发明的技术方案进行理解,下面通过具体地实施例进行详细地说明:
20.请参阅图3和图4,本发明的一种液压扭矩扳手反作用力臂支点定位支架,包括设置于极靴板上的定位模块4和垫条5。
21.定位模块4由主体模块与位于主体模块两侧的侧围41组成。主体模块41的下表面为弧形,其弧度的半径与极靴板一致,主体模块41与极靴板面接触时可充分贴合。主体模块的上表面对称的加工有台阶结构42,作为液压扭矩扳手的支撑位置,此结构可减小工装受力时沿极靴板的轴向力,同时满足工装受力时垂直于极靴板轴向的强度要求。为减小应力影响在台阶的位置的连接部进行倒角处理。主体模块的宽度与极靴板的宽度匹配,侧围41上开设有t型的定位槽和定位螺孔,其窄头侧指向极靴板,垫条的形状与定位槽的形状匹配也为t型结构。
22.定位模块4可前后滑动的跨接于极靴板上,其横向位移受到的侧围的限位,在选定定位位置后,在定位槽内插接垫条5,并通过螺栓6对垫条5及定位模块4进行固定。台阶结构作为液压扭矩扳手的反作用力臂支点。
23.主体模块4的上表面的台阶结构上设有吸铁钻连接结构7,作为吸铁钻的固定面。
24.本技术领域中的普通技术人员应当认识到,以上的实施例仅是用来说明本发明,而并非用作为对本发明的限定,只要在本发明的实质精神范围内,对以上所述实施例的变化、变型都将落在本发明的权利要求书范围内。
技术特征:
1.一种液压扭矩扳手反作用力臂支点定位支架,包括设置于极靴板上的定位模块和垫条,其特征在于:所述定位模块由主体模块与位于主体模块两侧的侧围组成,所述主体模块的下表面为弧形,其弧度的半径与所述极靴板一致,所述主体模块的上表面对称的设有台阶结构,所述主体模块的宽度与所述极靴板的宽度匹配,所述侧围上开设有定位槽和定位螺孔,所述垫条的形状与所述定位槽的形状匹配;所述定位模块可前后滑动的跨接于所述极靴板上,其横向位移受到所述的侧围的限位,在选定定位位置后,在所述定位槽内插接所述垫条,并通过螺栓对所述垫条及所述定位模块进行固定。2.根据权利要求1所述的一种液压扭矩扳手反作用力臂支点定位支架,其特征在于,所述定位槽为t型槽,其窄头侧指向所述极靴板,所述垫条为与之匹配的t型垫条。3.根据权利要求1所述的一种液压扭矩扳手反作用力臂支点定位支架,其特征在于,所述主体模块的上表面的台阶结构的连接部进行倒角。4.根据权利要求1所述的一种液压扭矩扳手反作用力臂支点定位支架,其特征在于,所述主体模块的上表面的台阶结构上设有吸铁钻连接结构。
技术总结
本发明公开了一种液压扭矩扳手反作用力臂支点定位支架,包括设置于极靴板上的定位模块和垫条,所述定位模块由主体模块与位于主体模块两侧的侧围组成,所述主体模块的下表面为弧形,其弧度的半径与所述极靴板一致,所述主体模块的上表面对称的设有台阶结构,所述主体模块的宽度与所述极靴板的宽度匹配,所述侧围上开设有定位槽和定位螺孔,所述垫条的形状与所述定位槽的形状匹配;所述定位模块可前后滑动的跨接于所述极靴板上,其横向位移受到所述的侧围的限位,在选定定位位置后,在所述定位槽内插接所述垫条,并通过螺栓对所述垫条及所述定位模块进行固定。本发明能够为方驱液压扭矩扳手在进行大扭矩紧固作业时提供反作用力臂支点。臂支点。臂支点。
技术研发人员:王亚 李刚 闫羽佳 滕文江 周恩民 刘恺 聂徐庆 张文
受保护的技术使用者:中国人民解放军63833部队 中国人民解放军63837部队
技术研发日:2021.09.06
技术公布日:2021/12/3
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1