具备载荷传导功能的上肢多关节主动助力外骨骼的制作方法
1.本发明涉及外骨骼技术领域,尤其涉及一种具备载荷传导功能的上肢多关节主动助力外骨骼。
背景技术:
2.外骨骼原来指生物学中保护生物内部柔软器官的一种坚硬外部结构,而现在外骨骼机器人是指一类模仿人体运动状态、加强人体运动能力的、集仿生学与人机工效学的机械装置,穿戴于人体肢体外侧,可以提高人们在行走耐久性、负重能力等特定方面的能力。
3.其应用领域十分广泛,在军事领域上,可以提高士兵的运动灵活性、机动性、负重能力等;在医疗领域,可以帮助上肢肌无力或其他残疾患者进行康复训练;在民用领域,可以帮助穿戴者提高搬运重物能力,提高行走耐久性等;在民用或军用领域上,现有上肢助力外骨骼按照助力方式可分为主动式助力和被动式助力两大类。
4.被动式依靠储能元件如cn305516455s中使用弹簧作为储能元件,其为穿戴者提供一定的助力,但由于缺乏主动控制,人机交互体验不足,且助力大小往往较小。
5.主动助力外骨骼如cn11284731327中,仅仅提供肩关节屈伸方向在托举过程中主动助力,在托举姿态维持时,因其电机驱动问题,无法提供较大助力,不具备抱闸锁紧功能,且其人机交互方式或人体意图识别能力较为困难。
6.同时,现有上肢外骨骼,其大多重量不轻,穿戴者需要承受外骨骼本身的重量,长时间背负,穿戴者会感到疲劳。因此,针对上述问题,有必要提出进一步地解决方案。
技术实现要素:
7.本发明的目的在于提供一种具备载荷传导功能的上肢多关节主动助力外骨骼,以克服现有技术中存在的:1)、上肢肩关节和肘关节各自由度助力不大、不全面的问题;2)、上肢内旋外旋也即如扩胸运动时自由度不足问题;3)、身高或胖瘦适应性不高,尺寸调节复杂或无法调节的问题;4)、系统无交互力检测机构或人机交互困难,难以快速并精确识别人体运动意图的问题;5)、现有上肢外骨骼重量全由人体背负承担,长时间易疲劳的问题。
8.为实现上述发明目的,本发明提供一种具备载荷传导功能的上肢多关节主动助力外骨骼,其包括:上肢助力模块以及载荷传导下肢模块;所述上肢助力模块包括:左臂模组、右臂模组以及背部模组;所述左臂模组和右臂模组均具有多个第一活动关节,所述多个第一活动关节与人体手臂活动关节对应设置;且所述左臂模组、右臂模组之间的间距能够通过所述背部模组进行调节;
所述载荷传导下肢模块包括:左腿模组、右腿模组以及腰部模组;所述左腿模组和右腿模组均具有多个第二活动关节,所述多个第二活动关节与人体腿部活动关腰部模组节对应设置;且所述左腿模组、右腿模组之间的间距能够通过所述腰部模组进行调节。
9.作为本发明具备载荷传导功能的上肢多关节主动助力外骨骼的改进,所述背部模组包括:背部横杆导轨、旋内旋外底座滑块以及背部支杆;所述背部支杆的上端与所述背部横杆导轨相连接,两个所述旋内旋外底座滑块间隔地滑动设置于所述背部横杆导轨上,所述左臂模组、右臂模组分别通过旋转与收摆转接法兰与对应的所述旋内旋外底座滑块相连接,且所述左臂模组、右臂模组能够围绕肩旋内旋外轴线进行枢转。
10.作为本发明具备载荷传导功能的上肢多关节主动助力外骨骼的改进,所述左臂模组与右臂模组对称设置,任一模组均包括:肩内收外摆电机、肩屈曲伸展电机、大臂杆、肘屈曲伸展电机以及前臂杆;所述肩内收外摆电机通过一转接法兰与所述肩屈曲伸展电机相连接;所述肩内收外摆电机的肩内收外摆轴线与所述肩屈曲伸展电机的肩屈曲伸展轴线相垂直;所述大臂杆的上端与所述肩屈曲伸展电机相连接,下端通过所述肘屈曲伸展电机与所述前臂杆相连接,所述肘屈曲伸展电机的肘屈曲伸展轴线与所述肩屈曲伸展电机的肩屈曲伸展轴线相平行。
11.作为本发明具备载荷传导功能的上肢多关节主动助力外骨骼的改进,所述大臂杆包括:大臂杆上和大臂杆下;所述大臂杆上中设置有大臂杆燕尾滑槽,所述大臂杆下插接于所述大臂杆上中,且所述大臂杆上和大臂杆下之间通过大臂长度调节钮锁定。
12.作为本发明具备载荷传导功能的上肢多关节主动助力外骨骼的改进,所述前臂杆包括:前臂杆上和前臂杆下;所述前臂杆上中设置有前臂杆燕尾滑槽,所述前臂杆下插接于所述前臂杆上中,且所述前臂杆上和前臂杆下之间通过前臂长度调节钮锁定。
13.作为本发明具备载荷传导功能的上肢多关节主动助力外骨骼的改进,任一模组还包括:大臂托杆和前臂托杆;所述大臂托杆连接于所述大臂杆上,所述前臂托杆连接于所述前臂杆上。
14.作为本发明具备载荷传导功能的上肢多关节主动助力外骨骼的改进,所述上肢助力模块还包括:左手模组和右手模组;所述左手模组和右手模组对称设置,任一模组连接于对应手臂模组的下端,任一模组均包括手部夹持组件,所述手部夹持组件还包括一控制握把。
15.作为本发明具备载荷传导功能的上肢多关节主动助力外骨骼的改进,所述腰部模组包括:腰部撑杆、腰宽调节钮、腰部转接件、髋屈伸法兰以及腰深调节钮;所述腰部撑杆连接于所述背部模组的下端,所述腰部撑杆与所述腰部转接件通过所述腰宽调节钮相连接,所述腰部转接件与所述髋屈伸法兰通过腰深调节钮相连接,所述左腿模组、右腿模组分别通过相应的髋屈伸法兰与所述腰部模组相连接。
16.作为本发明具备载荷传导功能的上肢多关节主动助力外骨骼的改进,所述左腿模
组与右腿模组对称设置,任一模组均包括:大腿结构和小腿结构;所述大腿结构包括:髋屈伸法兰、大腿杆、大腿尺寸调节钮以及大腿挡板;所述髋屈伸法兰一端通过销轴与所述腰部模组的一侧枢转连接,另一端通过销轴与所述大腿杆的一端枢转连接,且所述大腿杆能够围绕髋屈伸轴线进行枢转运动;所述小腿结构包括:小腿杆、小腿挡板以及小腿尺寸调节钮;所述小腿杆的一端通过销轴与所述大腿杆的另一端枢转连接,且所述小腿杆能够围绕膝关节屈伸轴线进行枢转运动。
17.作为本发明具备载荷传导功能的上肢多关节主动助力外骨骼的改进,所述载荷传导下肢模块还包括:左足模组和右足模组;所述左足模组和右足模组对称设置,任一模组连接于对应腿部模组的下端,任一模组包括:踝转接件和足底;所述足底通过所述踝转接件枢转连接于对应腿部模组的下端,并可围绕踝屈伸轴线进行枢转运动。
18.与现有技术相比,本发明的有益效果是:本发明的手臂模组和腿部模组均具有多个活动关节,且两个手臂模组以及两个腿部模组之间的间距可进行灵活调节,克服了现有外骨骼设备中关节各自由度助力不大、不全面、自由度不足的问题,从而充分适应不同穿戴者的使用需求。此外,本发明的设备重量承载可传导至地面,穿戴者不用承载设备本身的重量,进而减轻了相应的穿戴负荷。
附图说明
19.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
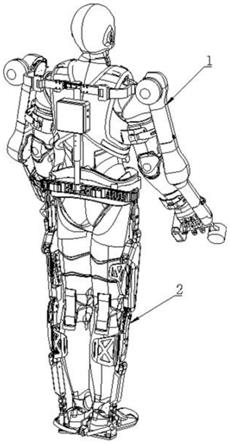
20.图1为本发明具备载荷传导功能的上肢多关节主动助力外骨骼一实施例穿戴状态下的总体示意图;图2为本发明具备载荷传导功能的上肢多关节主动助力外骨骼一实施例的总体结构示意图;图3为图2中上肢主动助力模块结构示意图;图4为图2中上肢主动助力模块的大臂结构示意图;图5为图2中载荷传导下肢模块的结构示意图;图6为人体肩关节运动自由度示意图;图7为人体肘关节运动自由度示意图。
具体实施方式
21.下面结合各实施方式对本发明进行详细说明,但应当说明的是,这些实施方式并非对本发明的限制,本领域普通技术人员根据这些实施方式所作的功能、方法、或者结构上的等效变换或替代,均属于本发明的保护范围之内。
22.如图1~7所示,本发明一实施例提供一种具备载荷传导功能的上肢多关节主动助
力外骨骼,其包括:上肢助力模块1以及载荷传导下肢模块2。
23.通过载荷传导下肢模块2,其与上肢助力模块1的设备重量承载可传导至地面,穿戴者不用承载设备本身的重量,同时,通过本发明外骨骼的刚性结构特征,手部的外部负载也可完全由外骨骼本体传导至地面。
24.上肢助力模块1包括:左臂模组、右臂模组以及背部模组。
25.其中,左臂模组和右臂模组均具有多个第一活动关节,多个第一活动关节与人体手臂活动关节对应设置;且左臂模组、右臂模组之间的间距能够通过背部模组进行调节。如此,通过设置多个活动关节,且两个手臂模组之间的间距可进行灵活调节,克服了现有外骨骼设备中关节各自由度助力不大、不全面、自由度不足的问题,从而充分适应不同穿戴者的使用需求。
26.其中,背部模组包括:背部横杆导轨4、旋内旋外底座滑块5以及背部支杆15;背部支杆15的上端与背部横杆导轨4相连接,两个旋内旋外底座滑块5间隔地滑动设置于背部横杆导轨4上,左臂模组、右臂模组分别通过旋转与收摆转接法兰506与对应的旋内旋外底座滑块5相连接,且左臂模组、右臂模组能够围绕肩旋内旋外轴线9进行枢转。
27.具体地,背部支杆15与背部横杆导轨4通过螺丝固连。背部支杆15与主控箱12通过螺丝固连。旋内旋外底座滑块5与旋转与收摆转接法兰506,通过销轴连接,可绕肩旋内旋外轴线9旋转;同时,旋内旋外底座滑块5可在背部横杆导轨4上自由滑动,其提供了一个横向滑动自由度;在穿戴者穿戴本发明外骨骼后,手臂平举向后旋转时或其他动作如扩胸运动时,通过旋内旋外轴线与此横向滑动自由度,活动能够更为自如。
28.左臂模组与右臂模组对称设置,任一模组均包括:肩内收外摆电机7、肩屈曲伸展电机8、大臂杆、肘屈曲伸展电机20以及前臂杆。
29.其中,肩内收外摆电机7通过一转接法兰50与肩屈曲伸展电机8相连接;肩内收外摆电机7的肩内收外摆轴线10与肩屈曲伸展电机8的肩屈曲伸展轴线11相垂直;具体地,旋转与收摆转接法兰506与肩内收外摆电机7的固定面连接,肩屈曲伸展电机8与肩内收外摆电机7中间有一转接法兰50,如图4,转接法兰50两侧分别与电机的输出面固定。肩内收外摆电机7与肩屈曲伸展电机8分别提供如图6的两侧手臂的肩内收外摆自由度、肩屈曲伸展自由度,也即如图3肩内收外摆轴线10、肩屈曲伸展轴线11方向的旋转。
30.大臂杆的上端与肩屈曲伸展电机8相连接,下端通过肘屈曲伸展电机20与前臂杆相连接,肘屈曲伸展电机20的肘屈曲伸展轴线19与肩屈曲伸展电机8的肩屈曲伸展轴线11相平行。
31.为了便于大臂杆和前臂杆长度的调节,大臂杆包括:大臂杆上13和大臂杆下14。大臂杆上13中设置有大臂杆燕尾滑槽51,大臂杆下14插接于大臂杆上13中,且大臂杆上13和大臂杆下14之间通过大臂长度调节钮18锁定。
32.同理,前臂杆包括:前臂杆上22和前臂杆下23。前臂杆上22中设置有前臂杆燕尾滑槽51,前臂杆下23插接于前臂杆上22中,且前臂杆上22和前臂杆下23之间通过前臂长度调节钮26锁定。
33.为了对人体手臂进行支撑,任一模组还包括:大臂托杆16和前臂托杆25;大臂托杆16连接于大臂杆上13,前臂托杆25连接于前臂杆上22。
34.具体地,如图4,为本发明外骨骼上肢主动助力模块大臂结构示意图;大臂托杆16
与大臂杆上13固定,大臂托板17与大臂托杆16螺丝固连可托住人体大臂。大臂杆上13与肩屈曲伸展电机8的固定面连接,大臂杆下14与大臂杆上13通过大臂杆燕尾滑槽51连接,大臂杆上13上固定大臂长度调节钮18;正常状态时,大臂长度调节钮18插入调节钮插孔52,大臂杆上13与大臂杆即可固定连接。当需要调节大臂的长度时,拉出大臂长度调节钮18,其即可从调节钮插孔52脱出,大臂杆下14可沿大臂杆燕尾滑槽51滑动,以此调节长度到合适位置,再按下大臂长度调节钮18完成大臂尺寸调节功能,以此适应不同臂长的穿戴人群。
35.如图3,肘屈曲伸展电机20可带动前臂结构绕肘屈曲伸展轴线19转动,也即提供人体肘关节屈伸自由度,如图6。前臂杆上22与肘屈曲伸展电机20输出面连接,前臂托杆25与前臂杆上22固连,前臂托板24与前臂托杆25螺丝固连,可托住人体前臂。前臂杆上22与前臂杆下23通过类似大臂杆上13与大臂杆下14的燕尾滑槽51连接,同时前臂的尺寸调节与大臂的尺寸调节功能类似,通过拉动按下前臂长度调节钮26来实现尺寸调节功能,以此适应不同臂长的穿戴人群。
36.上肢助力模块1还包括:左手模组和右手模组。左手模组和右手模组对称设置,任一模组连接于对应手臂模组的下端,任一模组均包括手部夹持组件27或29,手部夹持组件27、29还包括一控制握把28。
37.具体地,手部夹持组件27、29分别通过螺丝固定在前臂杆下23,同时手部夹持组件27、29都带有一个控制握把28,穿戴者通过控制控制握把28,实现外骨骼的各含电机的主动关节运动。其中,控制握把28可以是九轴摇杆、六轴交互力握把等形式;这种控制方式可快速并精确识别人体运动意图。
38.载荷传导下肢模块2包括:左腿模组、右腿模组以及腰部模组。
39.左腿模组和右腿模组均具有多个第二活动关节,多个第二活动关节与人体腿部活动关腰部模组节对应设置;且左腿模组、右腿模组之间的间距能够通过腰部模组进行调节。如此,通过设置多个活动关节,且两个腿部模组之间的间距可进行灵活调节,克服了现有外骨骼设备中关节各自由度助力不大、不全面、自由度不足的问题,从而充分适应不同穿戴者的使用需求。
40.其中,腰部模组包括:腰部撑杆30、腰宽调节钮31、腰部转接件32、髋屈伸法兰34以及腰深调节钮33。
41.腰部撑杆30连接于背部模组的下端,腰部撑杆30与腰部转接件32通过腰宽调节钮31相连接,腰部转接件32与髋屈伸法兰34通过腰深调节钮33相连接,左腿模组、右腿模组分别通过相应的髋屈伸法兰34与腰部模组相连接。
42.具体地,腰部撑杆30与背部支杆15固连,腰部撑杆30与腰部转接件32通过腰宽调节钮31连接,腰部转接件32与髋屈伸法兰34通过腰深调节钮33连接,通过腰宽调节钮31、腰深调节钮33,可调节适应不同穿戴者腰部尺寸。具体地,腰宽调节钮31、腰深调节钮33采用类似如上所述大臂长度调节插钮的方式进行长度调节,此处不在重复叙述。
43.左腿模组与右腿模组对称设置,任一模组均包括:大腿结构和小腿结构。
44.其中,大腿结构包括:髋屈伸法兰34、大腿杆、大腿尺寸调节钮38以及大腿挡板40;髋屈伸法兰34一端通过销轴与腰部模组的一侧枢转连接,另一端通过销轴与大腿杆的一端枢转连接,且大腿杆能够围绕髋屈伸轴线36进行枢转运动。
45.小腿结构包括:小腿杆、小腿挡板43以及小腿尺寸调节钮44。小腿杆的一端通过销
轴与大腿杆的另一端枢转连接,且小腿杆能够围绕膝关节屈伸轴线41进行枢转运动。
46.具体地,腰部转接件32与髋屈伸法兰34通过销轴连接,可绕髋内外翻轴线35相对旋转,形成髋关节内翻外翻自由度;髋屈伸法兰34与大腿杆上37通过销轴连接,可绕髋屈伸轴线36相对旋转,形成髋关节屈伸自由度;大腿杆下39与小腿杆上42销轴连接,可绕膝关节屈伸轴线41旋转,形成膝关节屈伸自由度;小腿杆下45与踝转接件47销轴连接,可绕踝内外翻轴线46旋转,形成踝关节内翻外翻自由度。大腿尺寸调节钮38与小腿尺寸调节钮44,可调节适应不同穿戴者腿部高度尺寸。其中,大腿尺寸调节钮38与小腿尺寸调节钮44,采用类似如上所述大臂长度调节插钮的方式进行长度调节,此处不在重复叙述。
47.载荷传导下肢模块2还包括:左足模组和右足模组。
48.其中,左足模组和右足模组对称设置,任一模组连接于对应腿部模组的下端,任一模组包括:踝转接件47和足底49;足底49通过踝转接件47枢转连接于对应腿部模组的下端,并可围绕踝屈伸轴线48进行枢转运动。具体地,踝转接件47与足部通过销轴连接,可绕踝屈伸轴线48旋转,形成踝关节屈伸自由度。
49.此外,为了便于使用时的穿戴,本实施例的具备载荷传导功能的上肢多关节主动助力外骨骼还包括:背部绑缚3与腰部绑缚21。背部绑缚3与背部支杆15通过魔术贴连接固定,腰部绑缚21与腰部撑杆30通过螺丝固连。
50.综上所述,本发明的手臂模组和腿部模组均具有多个活动关节,且两个手臂模组以及两个腿部模组之间的间距可进行灵活调节,克服了现有外骨骼设备中关节各自由度助力不大、不全面、自由度不足的问题,从而充分适应不同穿戴者的使用需求。此外,本发明的设备重量承载可传导至地面,穿戴者不用承载设备本身的重量,进而减轻了相应的穿戴负荷。
51.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。
52.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1