一种用于康复机器人的双模驱动关节
1.本发明涉及康复机械设备技术领域,具体是一种用于康复机器人的双模驱动关节。
背景技术:
2.脑卒中,俗称中风,是世界范围内常见的脑血管疾病之一,脑卒中后约70%
‑
85%的患者会伴有偏瘫。另外,脑外伤、脊髓损伤等也会导致上肢功能障碍。传统的人工康复训练模式对康复医师要求较高,存在人员消耗大、康复周期长、效率有限等问题导致具有信息处理能力、可重复训练的康复机器人成为研究热点。
3.患者的康复过程可以分为软瘫期和康复期。软瘫期的患者患肢呈松弛状态,没有运动能力,主要进行被动模式训练。被动模式训练是患者被动跟随康复机器人运动,是由康复机器人带动患肢沿着预设轨迹进行训练。康复期的患者肌力有了一定的恢复,患者上肢与机器人接触产生作用力,主要进行主动模式训练。主动模式训练是由患者上肢主动引导训练,康复机器人做跟随运动。被动训练中患者运动意图的参与可以帮助患者提升训练兴趣,自主设定训练轨迹;主动训练中患者运动意图可以作为人机交互的重要因素,确保康复训练的安全与柔顺。因此,同时服务于主被动两种训练模式的双模驱动关节,可以延伸康复机器人的功能,拓宽康复机器人的工作范围。
技术实现要素:
4.本发明针对现有上肢康复机器人关节多采用电动机主动驱动或阻尼器抑制振动,尚未见到兼具电动机和阻尼器的双模驱动设计方法,提出一种适用于主被动训练模式的双模驱动关节,将电动机正向驱动链路和电磁阻尼器的反向传动回路进行耦合设计,实现具有两种传动模式的可控切换,可以延伸康复机器人的功能,拓宽康复机器人的工作范围。
5.为达到上述目的,本发明采用以下技术方案实现的:
6.双模驱动关节包括关节本体、传动机构、驱动机构和阻尼组件四部分。
7.所述关节本体包括关节外壳101、组合电机套102、组合电机端盖103、关节连杆一104、关节连杆二105;传动机构包括齿轮一201、齿轮二202、传动轴一203、轴固定器204、离合器212、传动轴二213和由齿圈205、行星齿轮一206、行星架207、行星轴208、行星齿轮二209以及太阳轮210组成的减速机构211;驱动机构主要由电机驱动单元301组成;阻尼组件由防磨套401和旋转式磁流变阻尼器402组成。
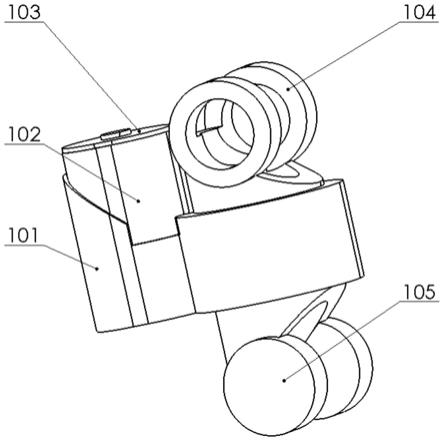
8.所述关节本体中组合电机套102滑动连接于关节连杆一104的滑槽,上部安装组合电机端盖103,下部安装关节外壳101。关节连杆一104套接在关节连杆二105上。
9.所述传动机构中齿轮一201固定于关节连杆二105,齿轮二202和齿轮一201啮合传动,齿轮二202和减速机构211安装在传动轴一203上,传动轴一203由轴固定器204固定。电机驱动单元301的输出轴与传动轴一203连接,电机驱动单元301的输入轴与离合器212的主动盘连接,离合器212的从动盘与传动轴二213连接,传动轴二213固定有阻尼组件。
10.所述减速机构211由齿圈205、行星齿轮一206、行星架207、行星轴208、行星齿轮二209以及太阳轮210组成。齿圈205固定于关节外壳101上,空套于电机输出轴,并与行星齿轮一206啮合。行星齿轮一206和行星齿轮二209分别通过键连接于行星轴208。行星轴208通过行星架207固定于电机输出轴,行星齿轮二209与太阳轮210啮合传动。太阳轮210安装在传动轴一203上。
11.所述阻尼组件由防磨套401和旋转式磁流变阻尼器402组成,防磨套401和旋转式磁流变阻尼器402都安装在传动轴二213上。
12.与现有技术相比本发明有以下特点:
13.本发明中关节具有实现空间刚性关节操作的能力,具备双模切换的能力。本发明由驱动传动机构和阻尼机构组成,具有一般关节的驱动传动装置,采用行星齿轮传动机构,配合不同的训练模式为患者提供辅助力或者阻尼力。患者进行被动训练时,离合器212从动盘与主动盘分离,电机驱动单元301工作,经过减速机构211带动传动轴一203转动,经过齿轮传动最终使得关节连杆二105相对关节连杆一104转动,实现小臂旋转运动;患者进行主动训练时,人体主动进行小臂旋转训练导致关节连杆二105相对关节连杆一104转动,经过齿轮传动和减速机构211反向增速,传动轴一203转动,离合器212从动盘与主动盘贴合,带动传动轴二213转动,旋转式磁流变阻尼器提供反向阻尼力,为小臂旋转运动提供训练阻力。
14.本发明中采用具有柔性可控阻尼系数的磁流变阻尼器,从而实现对关节的半主动控制。磁流变阻尼器具有能量消耗低、结构简单、阻尼力连续逆顺可调并且可调范围大、响应快、良好的温度稳定性以及可与微机控制结合等优良特性,可以减小冲击振动载荷、动量卸载、吸收碰撞动能。
15.本发明中考虑到患者臂长差异,关节连杆二105与组合电机结合,滑动连接于关节连杆一104的滑槽,实现臂长调节。
附图说明
16.图1是本发明具体实施方式的整体外观结构示意图。
17.图2是本发明具体实施方式的内部结构示意图。
18.图3、4是本发明具体实施方式的局部内部结构示意图。
19.附图中的标号说明如下:
20.关节外壳101、组合电机套102、组合电机端盖103、关节连杆一104、关节连杆二105、齿轮一201、齿轮二202、传动轴一203、轴固定器204、齿圈205、行星齿轮一206、行星架207、行星轴208、行星齿轮二209、太阳轮210、减速机构211、离合器212、传动轴二213、电机驱动单元301、防磨套401、旋转式磁流变阻尼器402。
具体实施方案
21.下面结合附图1~4对本发明做进一步详细说明:
22.所述关节本体包括关节外壳101、组合电机套102、组合电机端盖103、关节连杆一104、关节连杆二105;传动机构包括齿轮一201、齿轮二202、传动轴一203、轴固定器204、离合器212、传动轴二213和由齿圈205、行星齿轮一206、行星架207、行星轴208、行星齿轮二
209以及太阳轮210组成的减速机构211;驱动机构主要由电机驱动单元301组成;阻尼组件由防磨套401和旋转式磁流变阻尼器402组成。
23.所述关节本体中组合电机套102滑动连接于关节连杆一104的滑槽,上部安装组合电机端盖103,下部安装关节外壳101。关节连杆一104套接在关节连杆二105上。
24.所述传动机构中齿轮一201固定于关节连杆二105,齿轮二202和齿轮一201啮合传动,齿轮二202和减速机构211安装在传动轴一203上,传动轴一203由轴固定器204固定。电机驱动单元301的输出轴与传动轴一203连接,电机驱动单元301的输入轴与离合器212的主动盘连接,离合器212的从动盘与传动轴二213连接,传动轴二213固定有阻尼组件。
25.所述减速机构211由齿圈205、行星齿轮一206、行星架207、行星轴208、行星齿轮二209以及太阳轮210组成。齿圈205固定于关节外壳101上,空套于电机输出轴,并与行星齿轮一206啮合。行星齿轮一206和行星齿轮二209分别通过键连接于行星轴208。行星轴208通过行星架207固定于电机输出轴,行星齿轮二209与太阳轮210啮合传动。太阳轮210安装在传动轴一203上。
26.所述阻尼组件由防磨套401和旋转式磁流变阻尼器402组成,防磨套401和旋转式磁流变阻尼器402都安装在传动轴二213上。
27.患者进行被动训练时,离合器212从动盘与主动盘分离,电机驱动单元301工作带动电机输出轴转动,固定在电机输出轴上的行星轴208和行星架207转动,通过键连接在行星轴208上的行星齿轮一206和行星齿轮二209转动,行星齿轮二209与太阳轮210啮合,太阳轮210带动传动轴一203转动,从而实现减速机构211的减速增距作用,经过齿轮一201和齿轮二202之间的齿轮传动最终使得关节连杆二105相对关节连杆一104转动,实现小臂旋转运动;
28.患者进行主动训练时,人体主动进行小臂旋转训练导致关节连杆二105相对关节连杆一104转动,经过齿轮一201和齿轮二202之间的齿轮传动和减速机构211反向增速,传动轴一203转动,离合器212从动盘与主动盘贴合,带动传动轴二213转动,旋转式磁流变阻尼器提供反向阻尼力,为小臂旋转运动提供训练阻力。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1