一种基于AI技术的智能机楲用橡胶的生产装置的制作方法
一种基于ai技术的智能机楲用橡胶的生产装置
技术领域
1.本发明属于橡胶生产领域,尤其是涉及一种基于ai技术的智能机楲用橡胶的生产装置。
背景技术:
2.ai技术也即人工智能技术,人工智能不是人的智能,但能像人那样思考、也可能超过人的智能,人工智能是一门极富挑战性的科学,从事这项工作的人必须懂得计算机知识,心理学和哲学,人工智能是包括十分广泛的科学,它由不同的领域组成,如机器学习,计算机视觉等,其主要目标是使机器能够胜任一些通常需要人类智能才能完成的复杂工作。
3.在人工智能机械中橡胶垫圈是必不可少的橡胶制品,主要在各个部位起到密封的作用,但是在橡胶垫圈的加工过程中,主要是将橡胶套筒套设在切割套筒上,然后切割刀再对于橡胶套筒进行切割,但是目前的切割机构多是进行单一的切割,导致切割的效率较低。
4.为此,我们提出一种基于ai技术的智能机楲用橡胶的生产装置来解决上述问题。
技术实现要素:
5.本发明的目的是针对上述问题,提供一种能够同时对于多个橡胶套筒进行切割的基于ai技术的智能机楲用橡胶的生产装置。
6.为达到上述目的,本发明采用了下列技术方案:一种基于ai技术的智能机楲用橡胶的生产装置,包括底座,所述底座上通过连接柱固定连接有固定环,所述固定环上滑动连接有多个滑动箱,所述滑动箱内部设有转动机构,所述滑动箱顶端设有通过转动机构实现自转的套筒;
7.所述底座上固定连接有固定箱,所述固定箱顶端传动连接有转动板,所述转动板位于固定环内侧且与固定环内侧转动连接;
8.所述转动板上开设有多个弧形槽,所述弧形槽上活动连接有圆柱销,所述圆柱销底端通过连接件与滑动箱固定连接;
9.所述底座上固定连接有固定座,所述固定座内设有升降机构,所述升降机构传动连接有用于橡胶管套切割的切割机构。
10.在上述的一种基于ai技术的智能机楲用橡胶的生产装置中,所述固定环上开设有多个滑槽组,所述滑槽组包括两个平行设置的滑槽,所述连接件顶端分别贯穿两个滑槽且与滑槽滑动连接,所述连接件顶端与固定箱底端固定连接。
11.在上述的一种基于ai技术的智能机楲用橡胶的生产装置中,所述转动机构包括第一电机、驱动轴以及转动盘,所述第一电机固定连接在滑动箱内部,所述第一电机输出端与驱动轴固定连接,所述驱动轴贯穿滑动箱顶端设置且与转动盘固定连接,所述套筒套设在驱动轴外侧且底端与转动盘顶端相抵设置,所述套筒顶端与驱动轴固定连接。
12.在上述的一种基于ai技术的智能机楲用橡胶的生产装置中,套筒顶端通过螺栓结构与驱动轴固定连接,所述套筒顶端设有进液管以及排气管
13.在上述的一种基于ai技术的智能机楲用橡胶的生产装置中,所述驱动轴环侧固定连接有多个支撑杆,所述支撑杆远离驱动轴的一端与套筒滑动连接。
14.在上述的一种基于ai技术的智能机楲用橡胶的生产装置中,所述固定箱固定连接有第二电机,所述第二电机输出端固定连接有转动轴,所述转动轴顶端贯穿固定箱且与转动板固定连接。
15.在上述的一种基于ai技术的智能机楲用橡胶的生产装置中,多个所述弧形槽关于转动板中心旋转对称分布设置。
16.在上述的一种基于ai技术的智能机楲用橡胶的生产装置中,所述升降机构包括第三电机、螺纹杆以及控制块,所述固定座内部开设有升降槽,所述螺纹杆转动连接在升降槽内部,所述螺纹杆顶端贯穿升降槽顶壁且与固定连接在固定座顶端的第三电机输出端固定连接,所述控制块滑动连接在升降槽内部,且所述控制块被螺纹杆贯穿且与螺纹杆螺纹连接。
17.与现有的技术相比,本一种基于ai技术的智能机楲用橡胶的生产装置的优点在于:
18.1、本发明通过设置固定环、转动板以及滑动箱可实现在固定环上设置有多个套筒,进而实现切割机构能够同时对于多个套筒上的橡胶进行切割,进而能够实现大大提高了橡胶垫的加工效率。
19.2、本发明通过设置弧形槽、连接件以及滑槽组等结构能够实现当切割刀需要跳刀时,可同时改变多个套筒与切割刀之间的间距,进而能够方便的实现切刀的跳刀。
20.3、本发明通过在套筒顶端设置进液管以及排气管等结构能够实现在加工时,能够在套筒内部注入冷却液,进而实现确保对于套筒上的橡胶筒进行切割时,套筒的温度始终变化不大,进而避免切割时由于摩擦导致套筒的温度过高,套筒将热量传递至其余未切割的橡胶部分,导致的橡胶容易发生形变,进而导致的切割效果不佳等情况发生。
附图说明
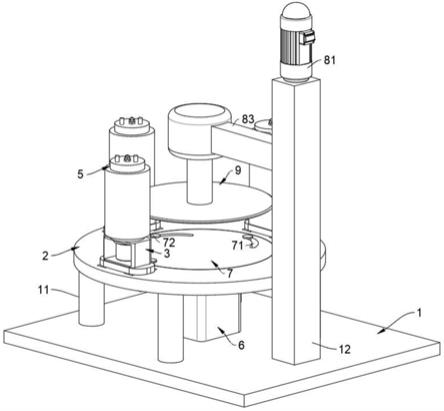
21.图1是本发明提供的一种基于ai技术的智能机楲用橡胶的生产装置的整体结构示意图;
22.图2是本发明提供的一种基于ai技术的智能机楲用橡胶的生产装置中固定环具体结构示意图;
23.图3是本发明提供的一种基于ai技术的智能机楲用橡胶的生产装置中套筒与滑动箱连接结构示意图;
24.图4是本发明提供的一种基于ai技术的智能机楲用橡胶的生产装置中套筒局部剖视结构示意图;
25.图5是本发明提供的一种基于ai技术的智能机楲用橡胶的生产装置中固定环底部结构示意图;
26.图6是本发明提供的一种基于ai技术的智能机楲用橡胶的生产装置中固定座与升降机构结构示意图。
27.图中,1、底座;11、连接柱;12、固定座;13、升降槽;2、固定环;21、滑槽;3、滑动箱;4、转动机构;41、第一电机;42、驱动轴;43、转动盘;44、支撑杆;5、套筒;51、进液管;52、排气
管;6、固定箱;61、第二电机;7、转动板;71、弧形槽;72、圆柱销;73、连接件;8、升降机构;81、第三电机;82、螺纹杆;83、控制块;9、切割机构。
具体实施方式
28.以下实施例仅处于说明性目的,而不是想要限制本发明的范围。
29.如图1-6所示,一种基于ai技术的智能机楲用橡胶的生产装置,包括底座1,底座1上通过连接柱11固定连接有固定环2,固定环2上滑动连接有多个滑动箱3,固定环2上开设有多个滑槽21组,滑槽21组包括两个平行设置的滑槽21,连接件73顶端分别贯穿两个滑槽21且与滑槽21滑动连接,连接件73顶端与滑动箱3底端固定连接,滑动箱3通过连接件73与滑槽21的配合实现滑动连接在固定环2上。
30.滑动箱3内部设有转动机构4,滑动箱3顶端设有通过转动机构4实现自转的套筒5,转动机构4包括第一电机41、驱动轴42以及转动盘43,第一电机41固定连接在滑动箱3内部,第一电机41输出端与驱动轴42固定连接,驱动轴42贯穿滑动箱3顶端设置且与转动盘43固定连接,套筒5套设在驱动轴42外侧且底端与转动盘43顶端相抵设置,套筒5底端通过密封圈与转动盘43密封设置,套筒5顶端与驱动轴42固定连接,套筒5上可套设有橡胶圈,并且在继续拧切割时,通过第一电机41实现带动驱动轴42转动,驱动轴42将会实现套筒5自转,进而方便后续的切割。
31.套筒5顶端通过螺栓结构与驱动轴42固定连接,进而方便的对于套筒5进行更换,套筒5顶端设有进液管51以及排气管52,通过进液管51可实现向套筒5内部注入冷却液,而排气管52用于平衡套筒5内部的压强,在将套筒取下时,在装置底部设置用以收集冷却液的收集系统即可实现冷却液的回收,同时冷却液可为非导电液体,避免影响电机的工作,当套筒5内部完全被冷却液进行填充时,可通过密封夹将进液管51以及排气管52进行夹住使其密封,过程中冷却液能够实现确保对于套筒5上的橡胶筒进行切割时,套筒5的温度始终变化不大,进而避免切割时由于摩擦导致套筒5的温度过高,套筒5将热量传递至其余未切割的橡胶部分,导致的橡胶容易发生形变,进而导致的切割效果不佳等情况发生。
32.驱动轴42环侧固定连接有多个支撑杆44,支撑杆44远离驱动轴42的一端与套筒5滑动连接,支撑杆44能够实现对于套筒5起到支撑的作用,进而避免套筒5容易出现形变等情况发生。
33.底座1上固定连接有固定箱6,固定箱6顶端传动连接有转动板7,转动板7为圆形板状结构,转动板7位于固定环2内侧且与固定环2内侧转动连接,固定箱6固定连接有第二电机61,第二电机61输出端固定连接有转动轴,转动轴顶端贯穿固定箱6且与转动板7固定连接,通过第二电机61可实现转动板7的转动。
34.转动板7上开设有多个弧形槽71,弧形槽71上活动连接有圆柱销72,圆柱销72底端通过连接件73与滑动箱3固定连接,圆柱销72与连接件73固定连接,多个弧形槽71关于转动板7中心旋转对称分布设置,当第二电机61工作时,第二电机61将会通过转动轴实现转动板7转动,进而实现转动板7将会通过弧形槽71实现圆柱销72的移动,圆柱销72将会改变连接件73与转动板7转动中心线之间的垂直距离,进而实现连接件73将会在滑槽21上滑动,进而实现连接件73将会带动滑动箱3进行滑动,并且改变套筒5的中心线与转动轴的中心线之间的间距。
35.底座1上固定连接有固定座12,固定座12内设有升降机构8,升降机构8传动连接有用于橡胶管套切割的切割机构9,升降机构8包括第三电机81、螺纹杆82以及控制块83,第一电机41、第二电机61以及第三电机81均为防水电机,固定座12内部开设有升降槽13,螺纹杆82转动连接在升降槽13内部,螺纹杆82顶端贯穿升降槽13顶壁且与固定连接在固定座12顶端的第三电机81输出端固定连接,控制块83滑动连接在升降槽13内部,且控制块83被螺纹杆82贯穿且与螺纹杆82螺纹连接,控制块83与切割机构9相连接设置。
36.本发明的使用方法如下所示:
37.装置可通过plc控制器进行控制第一电机41、第二电机61以及第三电机81的工作,首先将外部套设有橡胶筒的套筒5固定连接在驱动轴42上,然后控制切割机构9中的切割刀开始旋转,控制第一电机41实现驱动轴42的转动,驱动轴42将会实现套筒5进行自转。
38.再通过第二电机61实现转动板7的转动,转动板7将会通过弧形槽71实现圆柱销72的移动,圆柱销72将会改变连接件73与转动板7转动中心线之间的垂直距离,进而实现连接件73将会在滑槽21上滑动,进而实现连接件73将会带动滑动箱3进行滑动,并且改变套筒5的中心线与转动轴的中心线之间的间距,使得套筒5朝着切割刀的方向进行移动,进而实现套筒5上的橡胶筒被切割;
39.切割一圈之后,控制第二电机61反向转动,第二电机61将会实现转动板7的反向转动,转动板7将会通过圆柱销72以及连接件73等结构实现滑动箱3的反向滑动,进而实现套筒5朝着远离切割刀的方向进行移动,当套筒5移动至橡胶筒不会与切割刀相接触时,控制第三电机81工作,第三电机81将会带动螺纹杆82转动,螺纹杆82转动将会带动控制块83移动,控制块83移动将会改变切割机构9的高度,直到切割机构9高度的改变值与需要切割的橡胶垫的厚度一致时,第三电机81停止工作,此时完全切割刀的跳刀操作,跳刀完成之后,重复上述步骤即可实现对于橡胶筒的继续切割,使之被切割成橡胶垫圈。
40.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1