一种智能送物机器人及其控制方法与流程
1.本发明涉及机器人技术领域,特别涉及一种智能送物机器人及其控制方法。
背景技术:
2.服务机器人在世界范围内具有很大的发展潜力,在世界范围内,中国、美国、日本、韩国、德国等主要国家均在着力发展机器人。尤其是在发达国家,人工成本较高、老龄化严重的地区,服务机器人更是拥有着广阔的应用空间,服务机器人相对于工业机器人而言,更加贴近终端的用户,更贴近人,服务机器人的受众群体也更加广泛,由于服务行业本身特点千差万别,因此,服务机器人在功能、种类、特点方面也更加多样。从某种意义上说,服务机器人的市场空间比工业机器人更为广阔。服务机器人可以在很多领域代替人类,做更多重复性劳动。
3.室内服务型机器人的应用场景复杂,例如,酒店场景中的智能机器人,可以对接自动货柜,实现全流程的无人配送服务,也可实现送外卖等服务,但是,现有的机器人送物过程中的平稳性不足,比如在通过楼层与轿厢之间沟坎、门槛时机器人主体倾斜,会导致物品滑落或食物等汤汁、茶水等洒落,因此,有必要提出一种平稳行走的智能送物机器人。
技术实现要素:
4.本发明提供了一种智能送物机器人,包括机器人主体、行走系统、超声波距离传感器、红外摄像机和控制器,基于红外影像和超声波距离传感器解析得到障碍物高度,并通过控制行走机构两端和中心轴交替升降来跨越障碍物,越障过程中机器人主体始终保持平衡,仅通过竖直升降跨越障碍物,稳定性强。
5.本发明的技术方案为:
6.一种智能送物机器人,包括:
7.机器人主体,其具有多层置物盘;
8.行走系统,其可拆卸连接机器人主体的底盘,且具有相互铰接的第一履带轮和第二履带轮;
9.超声波距离传感器,其可拆卸设置在机器人主体上,能够检测机器人主体前方的障碍物距离;
10.红外摄像机,其可拆卸设置在机器人主体上,并与超声波距离传感器同轴设置,能够拍摄机器人主体前方的红外影像;
11.控制器,其连接超声波距离传感器、红外摄像机和行走系统,能够对障碍物距离和红外影像进行解析得到障碍物高度,并在障碍物高度低于越障高度阈值时,控制第一履带轮与第二履带轮的夹角,使行走系统的两端和中心轴交替升高,以跨越障碍物。
12.优选的是,行走系统包括:
13.第一履带轮;
14.第二履带轮,其一端与第一履带轮的一端铰接;
15.辅助轮,其位于机器人底盘的中心轴上;
16.升降机构,其一端支撑在机器人主体的底盘上,另一端连接辅助轮;
17.第一拉杆,其一端与第一履带轮的另一端铰接;
18.第二拉杆,其一端与第二履带轮的另一端铰接;
19.第一传动机构,其一端与升降机构转动配合,另一端与第一拉杆的另一端转动配合;
20.第二传动机构,其一端与升降机构转动配合,另一端与第二拉杆的另一端转动配合;
21.其中,升降机构升降能够驱动传动机构转动,带动拉杆另一端转动,以改变第一履带轮与第二履带轮的夹角。
22.优选的是,升降机构包括:
23.驱动电机;
24.伸缩杆,其连接驱动电机,且具有外齿。
25.优选的是,传动机构包括:
26.传动齿轮,其与伸缩杆的外齿啮合,伸缩杆伸缩能够带动传动齿轮转动;
27.同步槽,其与传动齿轮同轴,能够随传动齿轮转动;
28.同步轮,其与拉杆的另一端固连;
29.同步带,其设置在同步槽和同步轮之间,以使同步槽与同步轮同步转动。
30.优选的是,还包括:
31.限位滑槽,其为弧形,且与同步轮同心;
32.轴销,其一端与限位滑槽滑动配合,另一端连接拉杆。
33.一种智能送物机器人的控制方法,使用上述的智能送物机器人,包括:
34.步骤一、利用红外摄像机拍摄机器人主体前方的红外影像,识别出红外影像中的障碍物,并确定障碍物转角;
35.步骤二、利用超声波传感器,检测障碍物与机器人主体的距离,并根据距离和转角估算障碍物的高度;
36.步骤三、若障碍物的高度低于越障高度阈值,控制行走系统跨越障碍物。
37.优选的是,步骤一包括:
38.对红外影像进行预处理;
39.对预处理后的红外影像内的像素点进行逐像素滑窗,并计算每个像素点的局部对比度,进而得到全图的局部对比度图;
40.对局部对比度图进行阈值分割,识别出红外影像中的障碍物,并确定障碍物转角。
41.优选的是,障碍物转角计算过程为:
42.计算障碍物中心位置点坐标,中心轴坐标(x
z
,y
z
)的计算公式为:
[0043][0044]
其中,
m和n分别为障碍物边界的像素点行数与列数;
[0045]
计算障碍物水平转角为:
[0046][0047]
其中,α为障碍物水平转角,ω为红外摄像机拍摄得到的红外影像时的转角,p(x
z
,y
z
)为障碍物中心位置与红外影像中心轴的水平距离,γ为红外摄像机拍摄得到的红外影像水平方向边界角,x为红外摄像机拍摄得到的红外影像的宽度;
[0048]
计算障碍物俯仰角度为:
[0049][0050]
其中,q(x
z
,y
z
)为障碍物中心位置与红外影像中心轴的纵向距离。
[0051]
优选的是,障碍物高度计算公式为:
[0052][0053]
其中,为障碍物高度,h
z
为红外影像中障碍物底部边界与红外影像底部边界的距离,l
z
为超声波传感器检测识别出的红外影像中障碍物与所述机器人主体的距离,s
z
为红外影像中障碍物面积,μ
i
为单个像素点宽度;
[0054]
优选的是,跨越障碍物的过程为:
[0055]
步骤a、伸缩杆下降,辅助轮下降并与地面接触,同时驱动传动齿轮转动,并通过同步带拉动同步轮转动;
[0056]
步骤b、拉杆沿限位滑槽向上滑动,以抬起履带轮的另一端;
[0057]
步骤c、机器人主体向障碍物靠近,直到障碍物的顶端与第一履带轮接触;
[0058]
步骤d、伸缩杆上升,辅助轮上升,同时驱动传动齿轮转动,并带动拉杆沿限位滑槽向下滑动,以抬起履带轮的一端;
[0059]
步骤e、机器人主体继续前进,直到障碍物的顶端与第二履带轮接触,重复步骤a
‑
b以跨越障碍物。
[0060]
本发明的有益效果是:
[0061]
1、本发明提供的智能送物机器人,基于红外影像和超声波距离传感器解析得到障碍物高度,并通过控制行走机构两端和中心轴交替升降来跨越障碍物,越障过程中机器人主体始终保持平衡,仅通过竖直升降跨越障碍物,稳定性强,避免了因越障过程中机器人主体倾斜导致的物品滑落、汤汁、茶水洒落等问题。
[0062]
2、本发明还给出了智能送物机器人的控制方法,能够精确识别机器人行进前方障碍物,并快速解析出障碍物的高度,通过改变第一履带轮和第二履带轮间夹角,并配合辅助轮跨越障碍物,结构紧凑,易于控制。
附图说明
[0063]
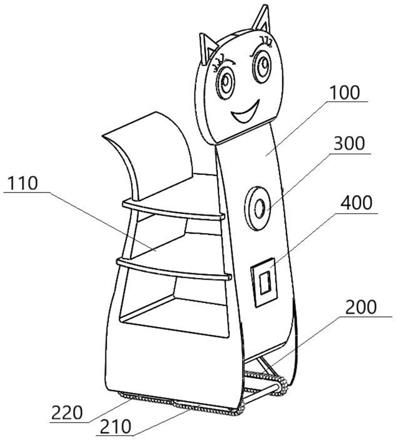
图1为本发明的提供的一种智能送物机器人结构示意图。
[0064]
图2为本发明的一个实施例中行走系统结构示意图。
[0065]
图3为本发明的一个实施例中的升降机构和传动机构的结构示意图。
具体实施方式
[0066]
以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0067]
需要说明的是,在本发明的描述中,术语“中”、“上”、“下”、“横”、“内”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0068]
此外,还需要说明的是,在本发明的描述中,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本发明中的具体含义。
[0069]
如图1所示一种智能送物机器人,包括机器人主体100、行走系统200、超声波距离传感器300、红外摄像机400和控制器。
[0070]
机器人主体100具有多层置物盘110,行走系统200可拆卸连接机器人主体100的底盘,且具有相互铰接的第一履带轮210和第二履带轮220,超声波距离传感器300可拆卸设置在机器人主体100上,能够检测机器人主体100前方的障碍物距离,红外摄像机400可拆卸设置在机器人主体100上,并与超声波距离传感器200同轴设置,能够拍摄机器人主体100前方的红外影像,控制器连接超声波距离传感器300、红外摄像机400和行走系统200,能够对障碍物距离和红外影像进行解析得到障碍物高度,并在障碍物高度低于越障高度阈值时,控制第一履带轮210与第二履带轮的夹角220,使行走系统的两端和中心轴交替升高,以跨越障碍物。
[0071]
一个优选的实施例是,行走系统200为两个,且对称设置在机器人主体100的底盘的两侧,第一履带轮210和第二履带轮220的铰接点位于机器人底盘的横向中心轴上。
[0072]
如图2所示,行走系统200包括第一履带轮210、第二履带轮220、辅助轮230、升降机构240、第一拉杆250、第二拉杆260、第一传动机构270和第二传动机构280。
[0073]
第二履带轮220一端与第一履带轮210一端铰接,辅助轮230位于机器人底盘的中心轴上,升降机构240一端支撑在机器人主体110的底盘上,另一端连接辅助轮230,第一拉杆250一端与第一履带轮210的另一端铰接,第二拉杆260一端与第二履带轮220的另一端铰接,第一传动机构270一端与升降机构240转动配合,另一端与第一拉杆250的另一端转动配合,第二传动机构280一端与升降机构240转动配合,另一端与第二拉杆260的另一端转动配合,其中,升降机构240升降能够驱动传动机构270(280)转动,带动拉杆250(260)另一端转动,以改变第一履带轮210与第二履带轮220的夹角。
[0074]
如图3所示,升降机构240包括驱动电机241和伸缩杆242,伸缩杆242其连接驱动电
机,且具有外齿。
[0075]
传动机构270(280)包括:传动齿轮271(281)、同步槽272(282)、同步轮273(283)、同步带274(284)。
[0076]
传动齿轮271(281)与伸缩杆242的外齿啮合,伸缩杆242伸缩能够带动传动齿轮271(281)转动,同步槽272(282)与传动齿轮271(281)同轴,能够随传动齿轮271(281)转动,同步轮273(283)与拉杆250(260)的另一端固连,同步带274(284)设置在同步槽272(282)和同步轮273(283)之间,以使同步槽272(282)与同步轮273(283)同步转动。
[0077]
一个优选的实施例是,还包括限位滑槽275(285)和轴销276(286),限位滑槽275(285)为弧形,且与同步轮273(283)同心,轴销276(286)一端与限位滑槽275(285)滑动配合,另一端连接拉杆250(260)。
[0078]
一种智能送物机器人的控制方法,使用上述的智能送物机器人,包括:
[0079]
步骤一、利用红外摄像机拍摄机器人主体前方的红外影像,识别出红外影像中的障碍物,并确定障碍物转角;
[0080]
步骤二、利用超声波传感器,检测障碍物与机器人主体的距离,并根据距离和转角估算障碍物的高度;
[0081]
步骤三、若障碍物的高度低于越障高度阈值,控制行走系统跨越障碍物。
[0082]
优选的是,步骤一包括:
[0083]
首先,对红外影像进行预处理。
[0084]
对采集的红外影像进行二值化处理,得到二值化后的红外影像:
[0085][0086]
其中,i(x,y)为(x,y)位置的灰度值,thresh为预设阈值,f(x,y)为二值化后红外图像(x,y)位置的灰度值;
[0087]
对二值化图像进行像素点分割,得到ξ=m
×
n个像素点;其中,m为横向像素个数,n为纵向像素个数;
[0088]
然后,对预处理后的红外影像内的像素点进行逐像素滑窗,并计算每个像素点的局部对比度,进而得到全图的局部对比度图。
[0089]
对像素点分割后的图像分别进行取反与直方图均衡化操作,从而获得m
×
n像素大小的预处理的红外影像。
[0090]
优选的是,红外影像像素点局部对比度计算公式为:
[0091][0092]
其中,d
h
(x,y)为(x,y)位置像素点的红外影像局部对比度,f
s
(x,y)为(x,y)位置像素点的二值化后灰度均值,f(x
c
,y
c
)为红外影像区域中心位置像素点的二值化后灰度值;
[0093]
最后,对局部对比度图进行阈值分割,识别出红外影像中的障碍物,并确定障碍物转角。
[0094]
通过对全局对比度图进行阈值分割:
[0095]
当时,将像素点确定为障碍物像素点,遍历全局对比度图,划分出
多个障碍物的边界;
[0096]
其中,阈值计算公式为:
[0097][0098]
其中,t为分割阈值,加权局部对比度图的平均值、d
max
为加权局部对比度图的最大值,δ为常数。
[0099]
进一步的,障碍物转角计算过程为:
[0100]
计算障碍物中心位置点坐标,中心轴坐标(x
z
,y
z
)的计算公式为:
[0101][0102]
其中,m和n分别为障碍物边界的像素点行数与列数;
[0103]
计算障碍物水平转角为:
[0104][0105]
其中,α为障碍物水平转角,ω为红外摄像机拍摄得到的红外影像时的转角,p(x
z
,y
z
)为障碍物中心位置与红外影像中心轴的水平距离,γ为红外摄像机拍摄得到的红外影像水平方向边界角,x为红外摄像机拍摄得到的红外影像的宽度;
[0106]
计算障碍物俯仰角度为:
[0107][0108]
其中,q(x
z
,y
z
)为障碍物中心位置与红外影像中心轴的纵向距离。
[0109]
进一步的,障碍物高度计算公式为:
[0110][0111]
其中,为障碍物高度,h
z
为红外影像中障碍物底部边界与红外影像底部边界的距离,l
z
为超声波传感器检测识别出的红外影像中障碍物与所述机器人主体的距离,s
z
为红外影像中障碍物面积,μ
i
为单个像素点宽度;
[0112]
进一步的,跨越障碍物的过程为:
[0113]
步骤a、伸缩杆下降,辅助轮下降并与地面接触,同时驱动传动齿轮转动,并通过同步带拉动同步轮转动;
[0114]
步骤b、拉杆沿限位滑槽向上滑动,以抬起履带轮的另一端;
[0115]
步骤c、机器人主体向障碍物靠近,直到障碍物的顶端与第一履带轮接触;
[0116]
步骤d、伸缩杆上升,辅助轮上升,同时驱动传动齿轮转动,并带动拉杆沿限位滑槽向下滑动,以抬起履带轮的一端;
[0117]
步骤e、机器人主体继续前进,直到障碍物的顶端与第二履带轮接触,重复步骤a
‑
b以跨越障碍物。
[0118]
在一个实施例中,智能送物机器人送物过程中实时获取机器人前方红外影像,并识别障碍物,当识别到机器人主体行进路线前方存在障碍物时,通过超声波距离传感器获得障碍物与机器人之间的距离,控制器解析出障碍物转角,并通过障碍物转角和障碍物与机器人之间的距离计算障碍物高度,当障碍物高度低于越障高度阈值时,行走系统执行越障行走。
[0119]
机器人向前行进,此时第一履带轮和第二履带轮间夹角为180度,履带轮作为主要轮转动前进,到达障碍物前方,第一履带轮前端与障碍物接触或具有一定间隙时,驱动电机驱动伸缩杆下降,辅助轮随伸缩杆下降与地面接触,同时驱动传动齿轮转动,同步槽随之转动,通过同步带带动同步轮转动,与同步轮固连的拉杆沿限位滑槽向上滑动,第一履带轮与第二履带轮的另一端均受拉杆的拉力沿铰接点转动,第一履带轮与第二履带轮间夹角变小,其夹角范围在100
‑
120度之间,此时辅助轮作为主要轮转动前进,直到第一履带轮底侧与障碍物顶端接触;
[0120]
驱动电机驱动伸缩杆上升,辅助轮随伸缩杆上升离开地面,同时驱动传动齿轮转动,同步槽随之转动,通过同步带带动同步轮转动,与同步轮固连的拉杆沿限位滑槽向下滑动,第一履带轮与第二履带轮的另一端均受拉杆的推力沿铰接点转动,第一履带轮与第二履带轮间夹角变大,其夹角范围在240
‑
260度之间,此时履带轮作为主要轮转动前进,直到第二履带轮底侧与障碍物顶端接触;
[0121]
驱动电机驱动伸缩杆下降,辅助轮随伸缩杆下降与地面接触,同时驱动传动齿轮转动,同步槽随之转动,通过同步带带动同步轮转动,与同步轮固连的拉杆沿限位滑槽向上滑动,第一履带轮与第二履带轮的另一端均受拉杆的拉力沿铰接点转动,第一履带轮与第二履带轮间夹角变小,其夹角范围在100
‑
120度之间,此时辅助轮作为主要轮转动前进,直到机器人主体远离障碍物。
[0122]
驱动电机驱动伸缩杆上升,辅助轮随伸缩杆上升离开地面,同时驱动传动齿轮转动,同步槽随之转动,通过同步带带动同步轮转动,与同步轮固连的拉杆沿限位滑槽向下滑动,第一履带轮与第二履带轮的另一端均受拉杆的推力沿铰接点转动,第一履带轮与第二履带轮间夹角变大,直到第一履带轮与第二履带轮间夹角恢复到180度。
[0123]
以上内容仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不脱离本发明的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1