一种软体关节弯曲角度传感器及刚柔混合手感知测量方法
1.本发明属于机器人手领域;具体涉及一种软体关节弯曲角度传感器及刚柔混合手感知测量方法。
背景技术:
2.现有的机器人灵巧手多为刚性构件及运动副关节组成的复杂机电系统。由于其复杂的结构,这些灵巧手在抗冲击性能上存在不足,控制复杂且价格昂贵。在一些对柔软易变形物体的抓握或操作任务中存在一定的劣势。如何使软体关节弯曲角度检测更灵敏,检测程度更高,成为刚柔混合手亟待解决的问题。
3.与刚性手不同,目前的软体手一般缺乏传感器,缺乏本体感知功能。即在缺乏外部传感器信息的时候难以判断手指的动作。传统机器人使用的位置传感器缺乏柔性,不能随软体手变形,或对变形产生较大的阻碍作用。
技术实现要素:
4.本发明提供了一种软体关节弯曲角度传感器及刚柔混合手感知测量方法,如何使软体关节弯曲角度检测更灵敏,检测程度更高,成为刚柔混合手亟待解决的问题,本发明利用液态金属传感器反馈闭环,实时反馈当前状态至上位机。
5.本发明通过以下技术方案实现:
6.一种软体关节弯曲角度传感器,将电阻微变信号通过电桥提升信号灵敏度,并将电桥两端毫伏级别的压差通过高倍放大后,以高输入阻抗输入到单端adc中采集信号,并通过spi传输至主控;
7.所述传感器的信号调理电路为开尔文电桥小电阻测量电路,所述开尔文电桥小电阻测量电路包括电阻r1、电阻r2、电阻r3、电阻r4、电阻r5、电阻r6、变阻器r7、电阻rs、放大器ad、adc芯片和放大器op,所述输入电压+5v与电阻r1的一端和电阻r2的一端相连接,所述电阻r1的另一端与电阻r3的一端和放大器ad的正输入端相连接,所述电阻r1的另一端与电阻r3的一端、电阻rs的一端、电阻r5的一端和电阻r6的一端相连接,所述电阻r3的另一端与电阻rs的另一端连接后接地,
8.所述电阻r5的另一端与电阻r6的另一端和放大器ad的负输入端相连接,
9.所述放大器ad的4号端与输入电压+5v和变阻器r7的一端相连接,所述变阻器r7的另一端与输入电压-5v和放大器ad的5号端相连接,所述放大器ad的ref端和放大器op的输出端与负输入端相连接,所述放大器op的正输入端与变阻器r7的第三端相连接。
10.一种软体关节弯曲角度传感器的刚柔混合手感知测量方法,所述刚柔混合手感知测量方法包括电阻测量和手指接触力测量;
11.所述电阻测量使用高精度测量中的四线电阻测量方法,使用开尔文电桥提高测量电路的灵敏度;
12.所述手指接触力测量是由于关节的低刚度及柔顺性特性,当手指抓握物体时,物
体与手指产生的力会导致关节弯曲角度的变化;相同的输入气压下,不同接触力及接触位置的分布会导致不同的弯曲角度;通过各气腔输入气压与关节实际转角反映出手指与物体的不同接触部位的不同接触力分布。
13.进一步的,所述电阻测量具体为,所述液态金属传感器通过fpc线以四线接法接入开尔文电桥,电桥电阻满足关系:r1/r5=r3/r6。设仪表放大器的放大倍率为m
amp
,电桥vcc为ui,则电路输出u0为:
[0014][0015]
进一步的,选用ad8426四通道仪表放大器,放大倍数选取1000倍放大;选用
±
5v隔离电源供电;对应输出饱和电压为
±
4.8v;各路通道通过电位计调节参考电压并经过op2177电压跟随器匹配阻抗,输入ref引脚进行调零;电源设置电容去除高频杂波,输出通道加入低通滤波使之直接驱动单输入adc;放大后的电压信号通过四通道复用adc:ads1220转换成数字信号并通过隔离spi通信。
[0016]
进一步的,关节转角测量具体为,关节在弯曲时视为均匀曲率的弯曲,根据电路测得的电阻值,联立以下两式分别求得ip及mcp关节的弯曲角度;
[0017][0018][0019]
进一步的,所述手指接触力测量具体为,由于关节的低刚度及柔顺性特性,当手指抓握物体时,物体与手指产生的力会导致关节弯曲角度的变化;相同的输入气压下,不同接触力及接触位置的分布会导致不同的弯曲角度;因此,通过各气腔输入气压与关节实际转角能反映出手指与物体的不同接触部位的不同接触力分布;
[0020]
在检测手指接触力时,检测每个指骨区域接触力的方向及大小;因此每根手指需要检测输出三个位置垂直方向压力,一共3个力数值组成的向量;其输入为4个气腔的输入气压与4个关节弯曲角度组成的向量;因此采用三层全连接神经网络对其函数关系进行拟合;
[0021]
在训练网络时,在手指指骨区域粘贴fsr测量接触力,测量不同手指关节弯曲角度及气压输入时的接触力数据形成训练集,用得到的训练集训练网络得到函数关系的非线性近似。
[0022]
本发明的有益效果是:
[0023]
本发明能够同时测量关节弯曲角度及接触力。
[0024]
本发明小电阻测量精度更高,理论测量精度可达1
‰
。
[0025]
本发明的关节能在小尺寸内实现大曲率弯曲,接近人手关节运动特点。本发明所使用的传感器能够减少对软体关节变形的影响。
附图说明
[0026]
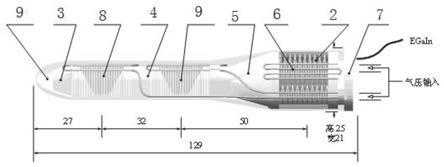
附图1是本发明的驱动感知一体化刚柔软混合手指示意图。
[0027]
附图2是本发明的开尔文电桥小电阻测量电路图。
[0028]
附图3是本发明的ip关节弯曲角度示意图。
[0029]
附图4是本发明的mcp关节弯曲角度示意图。
[0030]
附图5是本发明的接触力计算示意图。
[0031]
附图6是本发明的接触力示意图。
具体实施方式
[0032]
下面将结合本发明实施例中的附图对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0033]
本发明提供了一种将多通道柔性传感器集成进刚柔软手指的方法,使手指能够识别关节弯曲角度及接触力,为手指闭环控制提供反馈信号。其中,两个ip关节传感器分别检测两个ip关节弯曲角度。mcp关节使用对称两通道传感器,通过对信号解耦获得关节的弯曲与侧摆角度信息。通过气压与关节角度的关系,通过训练的多层网络获得接触力信息。
[0034]
一种刚柔混合手指,所述刚柔混合手指包括ip指间关节1、mcp掌指关节2、dp指骨3、mp指骨4、pp指骨5、弯曲传感器6和基座7;所述ip指间关节1包括dip指间关节8与pip指间关节9;
[0035]
所述dp指骨3、dip指间关节8、mp指骨4、pip指间关节9、pp指骨5、mcp掌指关节2和基座7依次连接,所述弯曲传感器6缠绕在ip指间关节1和mcp掌指关节2;
[0036]
所述dp指骨3、dip指间关节8、mp指骨4、pip指间关节9、pp指骨5、mcp掌指关节2和弯曲传感器6外包裹硅胶外壳9;
[0037]
所述dp指骨3、dip指间关节8、mp指骨4、pip指间关节9、pp指骨5形成气腔,该气腔在长度方向呈倒梯形结构。
[0038]
在指间关节中,气腔弹性基体采用dragon skin 10(smooth-on,usa)液态硅胶制成,内孔截面使用半圆与矩形组合的截面形状。这种截面的气腔下部为一平面方便设置应变限制层,上部为均匀半圆面以产生均匀的膨胀变形,中部使用矩形结构调整气腔截面竖向高度与横向宽度的比例,与纯半圆截面相比,能够在相同高度与宽度的条件下拥有更大的气腔截面积。
[0039]
为了形成单向的弯曲,气腔截面下部贴敷一层应变限制层(3m8915),并在整个气腔外部平行缠绕玻璃纤维丝线。在气腔充气时,应变限制层层视为可弯曲但不可伸长,从而限制了气腔下部的变形,而气腔上部仍然可以以较大的拉伸比例变形从而使气腔产生整体向下弯曲的变形。通过在气腔外侧整体缠绕一层纤维丝限制气腔的径向膨胀,进一步增加气腔上部的充气变形量同时增加气腔抵抗高压的能力,使之能够承受更大的气压,输出更大的作用力,提供较高的刚度。
[0040]
为了在关节这样一个很小的范围内实现大曲率的弯曲,气腔在长度方向设计为倒梯形结构,这种结构相比于普通结构能够降低在相同关节弯曲角度下的气腔上部硅胶材料的伸长比,显著降低非线性及材料变形阻力。在相同的充气气压下,倒梯形气腔能够获得更大的弯曲角度;在相同的弯曲角度下,可以缩短气腔下部不可拉伸应变层长度。这种性质有
助于提升关节处的弯曲曲率并减小关节的长度方向尺寸。为实现两指间关节1:1的耦合弯曲,手指具体结构上使用同一气腔贯穿连接两个ip“准关节”,实现dip及pip的同步弯曲运动。
[0041]
在掌指关节中,气腔弹性基体同样采用dragon skin 10(smooth-on,usa)液态硅胶制成。由于掌指关节需要同时实现两个方向的弯曲运动,为了简化结构以及建模复杂度,使用相对于中心对称的关节气腔排布方案。关节截面为外轮廓为上下凭借的两半椭圆弧,在截面上分布三个圆形气腔。为了缩短双向弯曲关节的整体长度同时增加弯曲曲率,每个气腔均缠绕有双螺旋结构的纤维。关节中心通过一玻璃纤维硅胶管作为中央限制气管实现与指间关节气腔连通。中央限制气管同时作为掌指关节的应变限制层,通过向其中一气腔充气,可以使关节向气腔的对向弯曲,通过控制每个气腔的充气压力可以控制关节的弯曲方向及角度形成耦合的运动,以同时产生弯曲与侧摆。
[0042]
一种软体关节弯曲角度传感器,将电阻微变信号通过电桥提升信号灵敏度,并将电桥两端毫伏级别的压差通过高倍放大后,以高输入阻抗输入到单端adc中采集信号,并通过spi传输至主控;
[0043]
液态金属注入各关节上方的毛细硅胶管(0.3mm内径,0.6mm外径),硅胶管两头插入导线并将其连接到开尔文电桥上。关节弯曲时会导致注入液态金属的硅胶管拉长导致电阻增大,微小电阻信号通过电桥采集,通过及放大电路及ad转换得到0-5v电压信号。因为液态金属传感器的电阻只有1-2欧姆,接触电阻及导线电阻对测量精度影响较大,需要采用开尔文电桥。
[0044]
所述传感器的信号调理电路为开尔文电桥小电阻测量电路,所述开尔文电桥小电阻测量电路包括电阻r1、电阻r2、电阻r3、电阻r4、电阻r5、电阻r6、变阻器r7、电阻rs、放大器ad、adc芯片和放大器op,所述输入电压+5v与电阻r1的一端和电阻r2的一端相连接,所述电阻r1的另一端与电阻r3的一端和放大器ad的正输入端相连接,所述电阻r1的另一端与电阻r3的一端、电阻rs的一端、电阻r5的一端和电阻r6的一端相连接,所述电阻r3的另一端与电阻rs的另一端连接后接地,
[0045]
所述电阻r5的另一端与电阻r6的另一端和放大器ad的负输入端相连接,
[0046]
所述放大器ad的4号端与输入电压+5v和变阻器r7的一端相连接,所述变阻器r7的另一端与输入电压-5v和放大器ad的5号端相连接,所述放大器ad的ref端和放大器op的输出端与负输入端相连接,所述放大器op的正输入端与变阻器r7的第三端相连接。
[0047]
一种软体关节弯曲角度传感器的刚柔混合手感知测量方法,所述刚柔混合手感知测量方法包括电阻测量和手指接触力测量;
[0048]
所述电阻测量使用高精度测量中的四线电阻测量方法,使用开尔文电桥提高测量电路的灵敏度;将接触电阻及电阻误差耦合如大电阻中,提升电路测量精度;
[0049]
所述手指接触力测量是由于关节的低刚度及柔顺性特性,当手指抓握物体时,物体与手指产生的力会导致关节弯曲角度的变化;相同的输入气压下,不同接触力及接触位置的分布会导致不同的弯曲角度;通过各气腔输入气压与关节实际转角反映出手指与物体的不同接触部位的不同接触力分布。
[0050]
进一步的,所述电阻测量具体为,所述液态金属传感器通过fpc线以四线接法接入开尔文电桥,电桥电阻满足关系:r1/r5=r3/r6。设仪表放大器的放大倍率为m
amp
,电桥vcc
为ui,则电路输出u0为:
[0051][0052]
进一步的,为了缩小系统体积,选用ad8426四通道仪表放大器,放大倍数选取1000倍放大;选用
±
5v隔离电源供电;对应输出饱和电压为
±
4.8v;为了消除仪表放大器的稳态失调误差,各路通道通过电位计调节参考电压并经过op2177电压跟随器匹配阻抗,输入ref引脚进行调零,减少失调电压的影响;电源设置电容去除高频杂波,输出通道加入低通滤波使之直接驱动单输入adc;放大后的电压信号通过四通道复用adc:ads1220转换成数字信号并通过隔离spi通信。
[0053]
进一步的,关节转角测量具体为,关节在弯曲时视为均匀曲率的弯曲,根据电路测得的电阻值,联立以下两式分别求得ip及mcp关节的弯曲角度;
[0054][0055][0056]
进一步的,所述手指接触力测量具体为,由于关节的低刚度及柔顺性特性,当手指抓握物体时,物体与手指产生的力会导致关节弯曲角度的变化;相同的输入气压下,不同接触力及接触位置的分布会导致不同的弯曲角度;因此,通过各气腔输入气压与关节实际转角能反映出手指与物体的不同接触部位的不同接触力分布;
[0057]
在检测手指接触力时,检测每个指骨区域接触力的方向及大小;因此每根手指需要检测输出三个位置垂直方向压力,一共3个力数值组成的向量;其输入为4个气腔的输入气压与4个关节弯曲角度组成的向量;因此采用三层全连接神经网络对其函数关系进行拟合;
[0058]
在训练网络时,在手指指骨区域粘贴fsr测量接触力,测量不同手指关节弯曲角度及气压输入时的接触力数据形成训练集,用得到的训练集训练网络得到函数关系的非线性近似。
[0059]
图5图6即为该基于液态金属传感器的接触力测量方法,网络使用的标准全连接神经网络,使用的反向传播算法等都是标准算法。此处的特点是将此类模型用于训练并检测刚柔软混合手的力信息。在不用力触觉传感器的情况下,将关节气腔气压及液态金属传感器信号作为输入,训练得到输出接触力的目标函数f:
[0060]
f=f(p,δ)
[0061]
其中,f表示接触力向量,p表示气腔气压输入向量,δ表示关节转角向量。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1