一种双位轮毂搬运机械手的制作方法
1.本发明及轮毂加工设备领域,特别涉及一种双位轮毂搬运机械手。
背景技术:
2.目前,随着企业的自动化程度不断提高,目前轮毂生产过程中的搬运工作已逐渐由机器人代替人工搬运,尤其是针对加工设备的上下料过程。目前轮毂普遍采用混线生产,因此要求机械手能适配多种直径尺寸的轮毂,然而目前大多数轮毂搬运机械手均通过夹取轮毂的径向外缘实现搬运,尺寸较大,需要较大的活动空间,不利于轮毂储料的紧凑性,尤其在需要适配的轮毂外径尺寸变化较大时,机械手将会变得臃肿笨重,增加机器人的负载从而增加设备投入成本。
技术实现要素:
3.本发明的目的在于至少解决现有技术中存在的技术问题之一,提供一种双位轮毂搬运机械手,有助于适应多种轮毂尺寸的同时使机械手结构更紧凑。
4.根据本发明的第一方面,提供一种双位轮毂搬运机械手,应用于工业机器人,轮毂具有中心凸台,包括:连接臂,固定于工业机器人的手腕末端;夹取气缸,安装于连接臂上,在搬运轮毂时,夹取气缸夹紧轮毂的中心凸台;限位开关,设置于夹取气缸靠近轮毂的中部;夹片,安装于夹取气缸上,通过夹取气缸推动夹片夹持轮毂;吹气模块,包括吹气管和吹气支架,吹气支架安装于接近夹取气缸的连接臂的两端,吹气管连接固定于吹气支架。
5.本发明所述的一种双位轮毂搬运机械手至少具有以下有益效果:本实施例设有连接臂、夹取气缸、限位开关、夹片、和吹气模块,连接臂安装有夹取气缸,夹取气缸上设有夹持轮毂中心凸台的夹片,其中夹取气缸设有位于夹取气缸靠近轮毂的中部的限位开关,用于检测轮毂中心凸台的高度是否超过预设值,有利于避免因未加工的轮毂的坯料偏差过大导致加工过程中出现干涉或碰撞。连接臂上安装有吹气模块,用于清洁加工完成的轮毂,在工业机器人换料时对轮毂进行及时的清洁有利于提升夹持轮毂的可靠性和维持生产环境的洁净。通过夹持轮毂中心凸台进行搬运的方式有利于使机械手具有紧凑的结构,活动空间小,适合在空间不充裕的生产线内活动,同时能在适配不同尺寸的轮毂时保持良好的紧凑性,有利于降低工业机器人的负载,提升效率并降低成本。
6.根据本发明所述的一种双位轮毂搬运机械手,夹取系统设有两个夹取气缸并分别安装于连接臂的两端,两个夹取气缸分别夹取一个轮毂。
7.根据本发明所述的一种双位轮毂搬运机械手,连接臂的中心安装于机器人的手腕末端,两端的夹取气缸呈对称分布。
8.根据本发明所述的一种双位轮毂搬运机械手,夹取气缸上设有行程开关,行程开关包括夹持行程开关和释放行程开关,用于检测夹取气缸夹持轮毂和释放轮毂的动作信号,有利于出现异常情况时的及时反馈。
9.根据本发明所述的一种双位轮毂搬运机械手,夹片上与轮毂接触的一侧具有与中
心凸台的径向外缘配合的弧面,有利于夹持轮毂时更加稳固。
10.根据本发明所述的一种双位轮毂搬运机械手,连接臂与工业机器人手腕末端连接的部位设有连接法兰,便于连接臂的拆装。
11.根据本发明所述的一种双位轮毂搬运机械手,连接臂上设有线束固定器,安装于连接臂上接近工业机器人的外侧,线束固定位用于固定输送高压气体的输气管和电信号传输线,有利于管线的合理布置,实现整洁美观的同时避免实际使用中管线与其他部件缠绕。
12.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
13.下面结合附图和实施例对本发明进一步地说明;
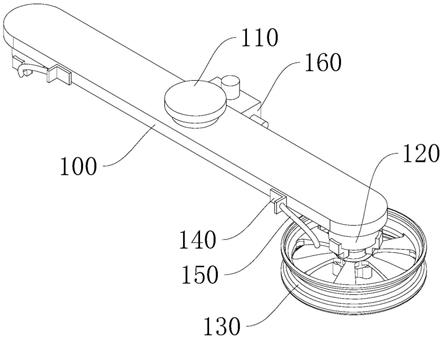
14.图1为本发明实施例一种双位轮毂搬运机械手的轴测图;
15.图2为本发明实施例一种双位轮毂搬运机械手的局部侧视图;
16.图3为本发明实施例一种双位轮毂搬运机械手的剖视图;
17.图4为本发明实施例一种双位轮毂搬运机械手的局部下视图。
18.附图标记:
19.连接臂100;连接法兰110;夹取气缸120;夹片121;释放行程开关122;夹持行程开关123;限位开关124;弧面125;轮毂130;中心凸台131;吹气支架140;吹气管150;线束固定器160。
具体实施方式
20.本部分将详细描述本发明的具体实施例,本发明之较佳实施例在附图中示出,附图的作用在于用图形补充说明书文字部分的描述,使人能够直观地、形象地理解本发明的每个技术特征和整体技术方案,但其不能理解为对本发明保护范围的限制。
21.在本发明的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
22.在本发明的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
23.本发明的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。
24.参照图1和图2,本发明的实施例提供了一种双位轮毂搬运机械手,包括:连接臂100,固定于工业机器人的手腕末端。在本方案中优选在连接臂100上设置两个夹取轮毂130的夹取气缸120,因此优选地连接臂100的两端安装夹取气缸120,中央部位通过螺栓连接安装在工业机器人的手腕末端,两个夹取气缸120相对于工业机器人的手腕末端对称设置,因
此连接臂100优选使用金属板材通过铣削或铸造成型,考虑到减轻机器人的负载,连接臂100优选使用铝合金材质。可选地,连接臂100与工业机器人手腕末端连接的部位设有连接法兰110,便于连接臂100的拆装。
25.夹取气缸120,安装于连接臂100上。夹取气缸120上设有若干个夹片121,本方案中夹片121优选三个在搬运轮毂130时,夹取气缸120在气压的推动下带动夹片121动作,进而夹紧轮毂130的中心凸台131。考虑到夹持的刚性和稳定性,本方案优选夹片121选用不锈钢、碳钢等金属材质,通过螺栓连接于夹取气缸120上。夹取气缸120优选使用具有自定心作用的气动卡盘,夹取气缸120在气压的推动下带动夹片121同时往夹取气缸120的中央部位收拢,把轮毂130夹紧后轮毂130位于轮毂130的盘面圆心与夹取气缸120的收拢中心在纵向重合的位置,定位一致性佳,有利于提高标定夹取位置的便捷性。
26.可选地,夹取气缸120靠近轮毂130一侧的中部设有与工业机器人信号连接的限位开关124,限位开关124外部设有一块用于接触轮毂130的中心凸台131端面的压片,压片与夹取气缸120为弹性连接,压片受到压力时会往夹取气缸120反向回缩。需要说明的是,双位轮毂130搬运机械手夹持轮毂130前移动到使夹取气缸120与轮毂130的中心凸台131端面具有预设距离的位置,此时压片接触轮毂130的中心凸台131端面并受压缩到一定的预设距离,若压片的回缩量超出预设值,限位开关124的信号传输到工业机器人并触发报警,停止工业机器人的动作。限位开关124用于检测轮毂130的中心凸台131高度是否超出预设值,同时有利于检测轮毂130是否出现被垫高等非预设情况,有效避免夹取轮毂130时产生碰撞或干涉。
27.可选地,参考图2,夹取气缸120上设有行程开关,行程开关包括夹持行程开关123和释放行程开关122,用于检测夹取气缸120夹持轮毂130和释放轮毂130的动作信号。在夹取轮毂130前,夹取气缸120在高压气体的作用下带动夹片121张开,此时释放行程开关122检测到夹片121张开的信号;在夹紧轮毂130时,夹取气缸120在高压气体的作用下带动夹片121往中心收拢,此时夹持行程开关123检测到夹片121收拢的信号,并把电信号传输到工业机器人;若轮毂130因碰撞或其他异常而从夹取气缸120中掉落,夹片121则在高压气体作用下收拢至预设的行程极限位置,此时夹持行程开关123和释放行程开关122均没有预设的检测信号,则工业机器人或与行程开关连接的自动控制系统进行报警,同时工业机器人的动作停止,使用行程开关有利于监控上下料过程中的异常情况,有利于及时避免异常情况继续扩大。同时夹持行程开关123和释放行程开关122外部设有可观察的指示灯,通过显示不同的颜色或通过开闭指示灯的方式标示不同的电信号状态,便于工人进行调试和观察。
28.可选地,连接臂100上设有吹气模块,包括吹气管150和吹气支架140,吹气支架140安装于接近夹取气缸120的连接臂100的两端,吹气管150连接固定于吹气支架140。吹气管150的设置有便于在加工设备下料时对加工完成的轮毂130进行清洁,有助于对轮毂130夹持的稳定和可靠,同时也利于保障生产线的洁净,避免搬运轮毂130过程中金属屑或切削油污染其他设备或环境。为使吹气管150稳定耐用,本方案优选吹气管150使用铜管或不锈钢管制成,通过给吹气管150折弯一定的角度实现最佳的喷气角度,有利于最大限度发挥清洁效果。优选地,吹气管150使用气动快插接头与供应高压气体的管道进行连接,方便拆装,同时管道使用供气软管,有利于管道的灵活布置。
29.可选地,参考图4,夹片121上与轮毂130接触的一侧具有与中心凸台131的径向外
缘配合的弧面125,夹取气缸120在高压气体的推动下进行收拢动作,带动夹片121夹持轮毂130的中心凸台131,弧面125与中心凸台131的径向外缘接触,有利于增大夹片121与轮毂130的接触面积,有利于夹持轮毂130时更加稳固。进一步地,在夹取轮毂130的过程中,本方案优选夹紧中心凸台131径向外缘,同时优选在夹片121上与轮毂130接触的弧面125安装弹性塑料材质的垫块,可以选用如聚氨酯、pom或弹性橡胶等材料,有利于增大接触时的摩擦力,也能避免在夹紧时碰伤轮毂130的外表面。
30.可选地连接臂100上设有线束固定器160,安装于连接臂100上接近工业机器人的外侧,线束固定位用于固定输送高压气体的输气管和电信号传输线,有利于管线的合理布置,实现整洁美观的同时避免实际使用中管线与其他部件缠绕。
31.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
32.尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1