一种电机生产用智能机械手的制作方法
1.本发明涉及电机生产技术领域,尤其涉及一种电机生产用智能机械手。
背景技术:
2.电机是指依据电磁感应定律实现电能转换或传递的一种电磁装置。在电路中用字母m(旧标准用d)表示。它的主要作用是产生驱动转矩,作为用电器或各种机械的动力源。发电机在电路中用字母g表示。它的主要作用是利用机械能转化为电能,目前最常用的是,利用热能、水能等推动发电机转子来发电;现有的电机生产用机械手通常只能完成对某一道工序中的物料进行操作,只能一次性拿取固定个数的物料,不能根据需求改变拿取物料部件的个数,且结构复杂,在机械手内部零件损坏后,需要拆除外部零件才能对内部的零件进行维修和更换,增加了维修人员的维修难度,不便于操作。
技术实现要素:
3.基于现有的机械手只能完成对某一道工序中的物料进行操作,难以运用到别的工序内,同时不能根据需求改变拿取物料部件的个数,且内部零件损坏后,需要拆除外部零件才能对内部的零件进行维修和更换,增加了维修人员的维修难度,不便于操作的技术问题,本发明提出了一种电机生产用智能机械手。
4.本发明提出的一种电机生产用智能机械手,包括安装底座,所述安装底座的下方固定安装有行走部件,所述安装底座的上表面固定安装有呈六边体结构的支撑柱,所述支撑柱的上表面分别开设有第一安装口和第一环形槽,所述第一安装口的内壁固定安装有第一驱动电机,所述支撑柱的上端表面设置有升降装置,所述升降装置的上表面固定安装有旋转装置;所述升降装置包括第一安装板,所述第一安装板固定连接于所述第一驱动电机的主轴外表面,所述第一安装板的上表面开设有第二连通口,所述第二连通口的内壁活动套接有安装杆,所述安装杆的外表面固定连接有呈线性阵列分布的齿圈,所述第一驱动齿轮与所述安装杆外表面的所述齿圈啮合传动,所述安装杆的下表面固定连接有第一上料装置;所述第一上料装置包括第一安装块和第二安装块,所述第一安装块和第二安装块的内壁均开设有螺纹口,所述螺纹口的内侧壁开设有第一连接口;所述旋转装置包括l形支撑板和第二支撑座,两个所述第二支撑座的相对表面均开设有第一连接槽,所述第一连接槽的内壁旋转套接有第一连接环,所述第一连接环的内壁固定套接有安装筒,所述安装筒的上表面固定安装有第二安装板,所述第二安装板的下表面开设有第三连通口,所述安装杆的上端外表面与所述第三连通口的内壁活动套接;所述第二安装板的下表面固定安装有第二上料装置,所述第二上料装置包括第二液压缸。
5.优选地,所述第一安装板的下表面固定连接有第一滑环,所述第一滑环的外表面与所述第一环形槽的内壁旋转套接,所述第一安装板的一端表面开设有第一滑槽,所述第一滑槽的内壁滑动插接有第一u形框;通过上述技术方案,达到了通过第一滑环与第一环形槽之间的配合使得第一安装板能够平稳的与支撑柱之间接触,通过第一滑槽与第一u形框的配合对第一u形框进行导向和限位的效果。
6.优选地,所述第一安装板的另一端表面固定安装有第一液压缸,所述第一安装板的另一端表面开设有第一连通口,所述第一液压缸的液压杆的外表面与所述第一连通口的内壁滑动插接,并与所述第一u形框的一端表面固定连接;通过上述技术方案,达到了通过第一液压缸驱动第一u形框在第一滑槽内滑动,通过第一连通口使得第一液压缸的液压杆在运行过程中可以在第一连通口内滑动,不会被阻碍。
7.优选地,所述第一u形框的两侧上表面均固定连接有第一齿条,所述第一安装板的两侧上表面均固定连接有第一支撑座,两个所述第一支撑座的内壁通过轴承固定连接有第一转轴,所述第一转轴的外表面固定套接有第一驱动齿轮,所述第一驱动齿轮的外表面分别与两个所述第一齿条啮合传动;通过上述技术方案,达到了通过第一液压缸带动第一u形框移动,带动第一齿条进行移动,由于第一齿条与第一驱动齿轮啮合,使得第一驱动齿轮进行旋转的效果。
8.优选地,所述安装底座的上表面固定安装有真空泵,所述真空泵的连接管与其中一个所述第一连接口的内壁固定套接,所述螺纹口的内壁开设有四个呈矩形阵列的伸缩口,所述伸缩口的内壁滑动插接有密封块,四个所述伸缩口的一端内壁均固定连接有压力弹簧,所述压力弹簧的自由端分别与四个所述密封块的一端表面固定连接;通过上述技术方案,达到了通过四个密封块将与外界之间连通的螺纹口的一端进行封堵,使得真空泵可以对连接的第一安装块和第二安装块内部的空气进行抽真空的效果。
9.优选地,所述螺纹口的内壁螺纹连接有t形管,所述t形管的一端表面通过轴承与所述第二安装块的一端表面固定连接,所述第一安装块和第二安装块的下表面均开设有通孔,且多个所述通孔的上端分别贯穿并延伸至多个所述螺纹口的内壁,所述第一安装块和第二安装块的下表面均固定连接有吸盘,且吸盘的内壁与所述通孔相互连通;通过上述技术方案,达到了通过t形管将第一安装块与第二安装块之间进行连通,在将t形管旋入螺纹口的同时,t形管的端面对密封块进行挤压,使得密封块缩入伸缩口内的效果。
10.优选地,所述安装筒的内壁与所述安装杆的外表面活动套接,所述安装筒的外表面固定套接有第一齿盘,两个所述l形支撑板的相对表面固定安装有第二驱动电机,所述第二驱动电机的主轴表面固定连接有第二齿轮,所述第二齿轮与所述第一齿盘啮合传动;通过上述技术方案,达到了通过第二驱动电机带动第二齿轮进行转动,通过第二齿轮与第一齿盘的啮合,带动第一齿盘进行转动,进而带动安装筒进行旋转,进而带动第二安装板进行旋转的效果。
11.优选地,所述第二安装板的一端表面开设有第二滑槽,所述第二滑槽的内壁滑动
插接有第二u形框,所述第二u形框的两侧上表面均固定连接有第二齿条,所述第二安装板的上表面固定连接有第三支撑座,两个所述第三支撑座的内壁均通过轴承固定连接有第二转轴,所述第二转轴的外表面固定套接有第二驱动齿轮,所述第二驱动齿轮分别与所述第二齿条和所述安装杆外表面的所述齿圈啮合传动;通过上述技术方案,达到了通过第二驱动齿轮与安装杆外部的齿圈的啮合,进一步保证了安装杆的稳定移动的效果。
12.优选地,所述第二液压缸的液压杆的一端固定连接有第三安装块,所述第三安装块的一端呈圆盘形状,所述第三安装块的一端表面开设有第二安装口,所述第二安装口的内壁固定安装有第三驱动电机,所述第三驱动电机的主轴表面固定套接有旋转块,所述第三安装块的一端表面开设有半环形槽,所述旋转块的一侧表面固定连接有滑杆,所述滑杆的外表面与所述半环形槽的内壁滑动连接,所述半环形槽的两端内壁均固定连接有限位开关,所述旋转块的另一侧表面开设有第三滑槽;通过上述技术方案,达到了通过第二安装口对第三驱动电机进行安装,通过第三驱动电机的旋转带动旋转块进行旋转,并且通过滑杆与半环形槽的配合控制第三驱动电机在旋转180
°
后停止的效果。
13.优选地,所述旋转块的一端内壁固定安装有第四驱动电机,所述第四驱动电机的输出轴固定连接有螺纹杆,所述螺纹杆的两端通过轴承与所述旋转块的内壁固定连接,所述螺纹杆的外表面分别螺纹连接有第一夹爪和第二夹爪,所述第一夹爪和所述第二夹爪的一端外表面均与所述第三滑槽的内壁滑动插接,所述第一夹爪和第二夹爪的上表面开设有夹取口,两个所述夹取口的内壁固定连接有橡胶层;通过上述技术方案,达到了通过第四驱动电机带动螺纹杆进行旋转,通过螺纹杆两端的螺旋旋向相反,使得第一夹爪与第二夹爪做相对运动,进而对物料进行夹取,通过橡胶层软性的特点,使得在对物料夹取时可随着物料的形状而改变的效果。
14.本发明中的有益效果为:1、通过设置升降装置,升降装置带动第一上料装置夹取物料进行上下移动,第一液压缸推动第一u形框,使得第一u形框在第一滑槽内滑动,同时,带动第一齿条进行移动,第一齿条与第一驱动齿轮啮合使得第一驱动齿轮转动,由于第一驱动齿轮与安装杆表面的齿圈啮合,进而带动安装杆进行升降,进而带动第一上料装置随着安装杆而移动的效果。
15.2、通过设置旋转装置,达到了通过第二驱动电机带动第二齿轮与安装筒表面的第一齿盘啮合,带动安装筒旋转,进而带动安装筒上端连接的第二安装板进行旋转,第二安装板下方的第二液压缸带动第三安装块进行升降的效果。
16.3、通过设置第一上料装置,在第一上料装置对物料进行夹取时,由于第一安装块内部的螺纹口的两端密封块将螺纹口的两端密封,配合真空泵通过第一连接口以及通孔对将吸盘抽真空,使得吸盘将物料吸附住,当需要同时对多个物料进行吸附夹取时,将第二安装块一端的t形管旋入螺纹口内,多个第二安装块依次连接,t形管对密封块进行挤压,使得四个密封块缩入伸缩口内,通过t形管使得第一安装块与第二安装块之间连通,进而增加吸盘的数量。
17.4、通过设置第二上料装置第三驱动电机带动旋转块进行旋转,当滑杆触碰到限位开关后,控制第三驱动电机在旋转180
°
后停止,旋转块一端的第四驱动电机带动螺纹杆进
行旋转,通过螺纹杆两端的螺旋旋向相反,使得第一夹爪与第二夹爪做相对运动,进而对物料进行夹取,通过橡胶层软性的特点,使得在对物料夹取时可随着物料的形状而改变的效果。
附图说明
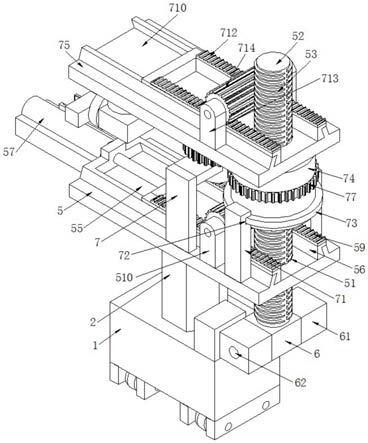
18.图1为本发明提出的一种电机生产用智能机械手的示意图;图2为本发明提出的一种电机生产用智能机械手的剖视图;图3为本发明提出的一种电机生产用智能机械手的立体图;图4为本发明提出的一种电机生产用智能机械手的爆炸图;图5为本发明提出的一种电机生产用智能机械手的第三安装块结构剖视图;图6为本发明提出的一种电机生产用智能机械手的第一安装块结构剖视图;图7为本发明提出的一种电机生产用智能机械手的第一安装块结构剖视图;图8为本发明提出的一种电机生产用智能机械手的密封块结构立体图。
19.图中:1、安装底座;2、支撑柱;3、第一环形槽;4、第一驱动电机;5、第一安装板;51、第二连通口;52、安装杆;53、齿圈;54、第一滑环;55、第一滑槽;56、第一u形框;57、第一液压缸;58、第一连通口;59、第一齿条;510、第一支撑座;511、第一驱动齿轮;6、第一安装块;61、第二安装块;62、螺纹口;63、第一连接口;64、伸缩口;65、密封块;66、压力弹簧;67、t形管;68、通孔;69、吸盘;7、l形支撑板;71、第二支撑座;72、第一连接槽;73、第一连接环;74、安装筒;75、第二安装板;76、第三连通口;77、第一齿盘;78、第二驱动电机;79、第二齿轮;710、第二滑槽;711、第二u形框;712、第二齿条;713、第三支撑座;714、第二驱动齿轮;8、第二液压缸;81、第三安装块;82、第二安装口;83、第三驱动电机;84、旋转块;841、滑杆;85、半环形槽;86、限位开关;87、第三滑槽;88、第四驱动电机;89、螺纹杆;810、第一夹爪;811、第二夹爪;812、夹取口;813、橡胶层;9、真空泵。
具体实施方式
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
21.参照图1-8,一种电机生产用智能机械手,包括安装底座1,安装底座1的下方固定安装有行走部件,安装底座1的上表面固定安装有呈六边体结构的支撑柱2,为了对升降装置进行稳定的安装以及将第一驱动电机4进行安装,在支撑柱2的上表面分别开设第一安装口和第一环形槽3,进一步的,在第一安装口的内壁固定安装有第一驱动电机4,支撑柱2的上端表面设置有升降装置,升降装置的上表面固定安装有旋转装置;升降装置包括第一安装板5,为了使第一安装板5稳定的与支撑柱2之间进行放置,在第一安装板5的下表面固定连接有第一滑环54,并且使第一滑环54的外表面与第一环形槽3的内壁旋转套接,为了使第一u形框56在第一滑槽55内进行固定方向的移动,在第一安装板5的一端表面开设有呈梯形结构的第一滑槽55,并且在第一滑槽55的内壁滑动插接有第一u形框56,达到了通过第一滑环54与第一环形槽3之间的配合使得第一安装板5能够平稳的与支撑柱2之间接触,通过第一滑槽55与第一u形框56的配合对第一u形框56进行导向和限位的效果;
为了带动第一安装板5进行旋转,将第一安装板5固定连接于第一驱动电机4的主轴外表面,为了驱动第一u形框56进行运动,在第一安装板5的另一端表面固定安装有第一液压缸57,进一步的,在第一安装板5的另一端表面开设有第一连通口58,使第一液压缸57的液压杆的外表面与第一连通口58的内壁滑动插接,并与第一u形框56的一端表面固定连接,达到了通过第一液压缸57驱动第一u形框56在第一滑槽55内滑动,通过第一连通口58使得第一液压缸57的液压杆在运行过程中可以在第一连通口58内滑动,不会被阻碍;为了通过第一u形框56的移动带动第一驱动齿轮511进行旋转,在第一u形框56的两侧上表面均固定连接有第一齿条59,进一步的,为了对第一驱动齿轮511进行安装,在第一安装板5的两侧上表面均固定连接有第一支撑座510,进一步的在两个第一支撑座510的内壁通过轴承固定连接有第一转轴,在第一转轴的外表面固定套接有第一驱动齿轮511,使得第一驱动齿轮511的外表面分别与两个第一齿条59啮合传动,达到了通过第一液压缸57带动第一u形框56移动,带动第一齿条59进行移动,由于第一齿条59与第一驱动齿轮511啮合,使得第一驱动齿轮511进行旋转的效果;为了对安装杆52进行限位和导向,在第一安装板5的上表面开设有第二连通口51,第二连通口51的内壁活动套接有安装杆52,为了控制安装杆52随着第一驱动齿轮511的旋转而升降,在安装杆52的外表面固定连接有呈线性阵列分布的齿圈53,第一驱动齿轮511与安装杆52外表面的齿圈53啮合传动,进一步的,安装杆52的下表面固定连接有第一上料装置;第一上料装置包括第一安装块6和第二安装块61,为了使第一安装块6与第二安装块61之间进行连接,在第一安装块6和第二安装块61的内壁均开设有螺纹口62,螺纹口62的内侧壁开设有第一连接口63,为了对第一安装块6和第二安装块61内部抽真空,在安装底座1的上表面固定安装有真空泵9,进一步的,使真空泵9的连接管与其中一个第一连接口63的内壁固定套接,为了使第一安装块6单个使用,或对最外面的第二安装块6与外界连通的通口进行密封,在螺纹口62的内壁开设有四个呈矩形阵列的伸缩口64,进一步的,在伸缩口64的内壁滑动插接有密封块65,为了使密封块65在不受挤压的情况下复位,在四个伸缩口64的一端内壁均固定连接有压力弹簧66,进一步的,使压力弹簧66的自由端分别与四个密封块65的一端表面固定连接,达到了通过四个密封块66将与外界之间连通的螺纹口62的一端进行封堵,使得真空泵9可以对连接的第一安装块6和第二安装块61内部的空气进行抽真空的效果;为了将第二安装块61安装到第一安装块6上,在螺纹口62的内壁螺纹连接有t形管67,为了在t形管67旋转时,第二安装块61保持正放的状态,将t形管67的一端表面通过轴承与第二安装块61的一端表面固定连接,为了使螺纹口62的内壁与吸盘69之间连通,在第一安装块6和第二安装块61的下表面均开设有通孔68,进一步的,使多个通孔68的上端分别贯穿并延伸至多个螺纹口62的内壁,进一步的,在第一安装块6和第二安装块61的下表面均固定连接有吸盘69,且吸盘69的内壁与通孔68相互连通,达到了通过t形管67将第一安装块6与第二安装块61之间进行连通,在将t形管67旋入螺纹口62的同时,t形管67的端面对密封块65进行挤压,使得密封块65缩入伸缩口64内的效果;旋转装置包括l形支撑板7和第二支撑座71,为了对安装筒74进行安装,在两个第二支撑座71的相对表面均开设有第一连接槽72,进一步的,第一连接槽72的内壁旋转套接
有第一连接环73,进一步的,第一连接环73的内壁固定套接有安装筒74,为了带动第二安装板75进行旋转,使安装筒74的上表面固定安装有第二安装板75,为了使安装杆52与第二安装板75之间套接,在第二安装板75的下表面开设有第三连通口76,并使安装杆52的上端外表面与第三连通口76的内壁活动套接;为了使安装杆52可以在安装筒74内升降,并不妨碍安装筒74的运行,使安装筒74的内壁与安装杆52的外表面活动套接,为了带动安装筒74进行旋转,在安装筒74的外表面固定套接有第一齿盘77,两个l形支撑板7的相对表面固定安装有第二驱动电机78,通过两个l形支撑板7对第二驱动电机78进行安装,进一步的,第二驱动电机78的主轴表面固定连接有第二齿轮79,进一步的,第二齿轮79与第一齿盘77啮合传动,达到了通过第二驱动电机78带动第二齿轮79进行转动,通过第二齿轮79与第一齿盘77的啮合,带动第一齿盘77进行转动,进而带动安装筒74进行旋转,进而带动第二安装板75进行旋转的效果;第二安装板75的一端表面开设有第二滑槽710,为了在第二上料装置运行时,减小第二安装板75一端的重量,在第二滑槽710的内壁滑动插接有第二u形框711,进一步的,第二u形框711的两侧上表面均固定连接有第二齿条712,为了对第二驱动齿轮714进行安装,在第二安装板75的上表面固定连接有第三支撑座713,并在两个第三支撑座713的内壁均通过轴承固定连接有第二转轴,进一步的,在第二转轴的外表面固定套接有第二驱动齿轮714,使得第二驱动齿轮714分别与第二齿条712和安装杆52外表面的齿圈53啮合传动,达到了通过第二驱动齿轮714与安装杆52外部的齿圈53的啮合,进一步保证了安装杆52的稳定移动的效果;第二安装板75的下表面固定安装有第二上料装置,第二上料装置包括第二液压缸8,为了控制第三安装块81进行升降,第二液压缸8的液压杆的一端固定连接有第三安装块81,进一步的,将第三安装块81的一端呈圆盘形状,为了对第三驱动电机83进行安装,在第三安装块81的一端表面开设有第二安装口82,进而使第二安装口82的内壁固定安装有第三驱动电机83,为了带动旋转块84进行旋转,在第三驱动电机83的主轴表面固定套接有旋转块84,为了控制旋转块84在旋转180
°
后停止,在第三安装块81的一端表面开设有半环形槽85,进一步的,在旋转块84的一侧表面固定连接有滑杆841,并使滑杆841的外表面与半环形槽85的内壁滑动连接,进一步的,在半环形槽85的两端内壁均固定连接有限位开关86,旋转块84的另一侧表面开设有第三滑槽87,达到了通过第二安装口82对第三驱动电机83进行安装,通过第三驱动电机83的旋转带动旋转块84进行旋转,并且通过滑杆841与半环形槽85的配合控制第三驱动电机83在旋转180
°
后停止的效果;旋转块84的一端内壁固定安装有第四驱动电机88,为了控制第一夹爪810和第二夹爪811对物料进行夹取,在第四驱动电机88的输出轴固定连接有螺纹杆89,将螺纹杆89的两端通过轴承与旋转块84的内壁固定连接,进一步的,在螺纹杆89的外表面分别螺纹连接有第一夹爪810和第二夹爪811,为了对第一夹爪810和第二夹爪811进行导向,将第一夹爪810和第二夹爪811的一端外表面均与第三滑槽87的内壁滑动插接,进一步的,第一夹爪810和第二夹爪811的上表面开设有夹取口812,为了便于对物料进行夹取,在两个夹取口812的内壁固定连接有橡胶层813,达到了通过第四驱动电机88带动螺纹杆89进行旋转,通过螺纹杆89两端的螺旋旋向相反,使得第一夹爪810与第二夹爪811做相对运动,进而对物料进行夹取,通过橡胶层813软性的特点,使得在对物料夹取时可随着物料的形状而改变的效果。
22.工作原理:升降装置带动第一上料装置夹取物料进行上下移动,旋转装置带动第二上料装置夹取物料左右移动;第一液压缸57推动第一u形框56,使得第一u形框56在第一滑槽55内滑动,同时,带动第一齿条59进行移动,第一齿条59与第一驱动齿轮511啮合使得第一驱动齿轮511转动,由于第一驱动齿轮511与安装杆52表面的齿圈53啮合,进而带动安装杆52进行升降,在安装杆52升降的同时,带动第一安装块6进行移动,在第一上料装置对物料进行夹取时,由于第一安装块6内部的螺纹口62的两端密封块65将螺纹口62的两端密封,配合真空泵9通过第一连接口63以及通孔68对将吸盘69抽真空,使得吸盘69将物料吸附住,当需要同时对多个物料进行吸附夹取时,将第二安装块61一端的t形管67旋入螺纹口62内,t形管67对密封块65进行挤压,使得四个密封块65缩入伸缩口64内,通过t形管67使得第一安装块6与第二安装块61之间连通,进而增加吸盘69的数量,当第一上料装置需要旋转时,通过第一驱动电机4带动第一安装板5进行旋转;在使用第二上料装置对物料进行上料时,第二驱动电机78带动第二齿轮79与安装筒74表面的第一齿盘77啮合,带动安装筒74旋转,进而带动安装筒74上端连接的第二安装板75进行旋转,第二安装板75下方的第二液压缸8带动第三安装块81进行升降,第三驱动电机83带动旋转块84进行旋转,当滑杆841触碰到限位开关86后,控制第三驱动电机83停止,旋转块84一端的第四驱动电机88带动螺纹杆89进行旋转,通过螺纹杆89两端的螺旋旋向相反,使得第一夹爪810与第二夹爪811做相对运动,进而对物料进行夹取,第三驱动电机83可带动旋转块84进行旋转,进而达到带动物料翻转的效果。
23.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1