一种压机系统及其控制方法与流程
1.本发明涉及压机领域,具体涉及一种压机系统及其控制方法。
背景技术:
2.压机是压力机、液压压机、油压机的简称,压机指用于工业制品通过压力成型的一种成型机械,压机种类多样,压力机是较为常见的一类。
3.压力机(包括冲床、液压机)是一种结构精巧的通用性压力机。具有用途广泛,生产效率高等特点,压力机可广泛应用于切断、冲孔、落料、弯曲、铆合和成形等工艺。通过对金属坯件施加强大的压力使金属发生塑性变形和断裂来加工成零件。机械压力机工作时由电动机通过三角皮带驱动大皮带轮(通常兼作飞轮),经过齿轮副和离合器带动曲柄滑块机构,使滑块和凸模直线下行。机械压力机在锻压工作完成后滑块程上行,离合器自动脱开,同时曲柄轴上的自动器接通,使滑块停止在上止点附近。
4.现在压力机用途比较广泛,其中在塑料薄板加工中,需要使用压力机将塑料薄板进行冲孔、冲剪或切断加工,但是现在压力机的控制系统较为落后,难以实现自动化连续化加工控制,不能满足现在的使用要求。
技术实现要素:
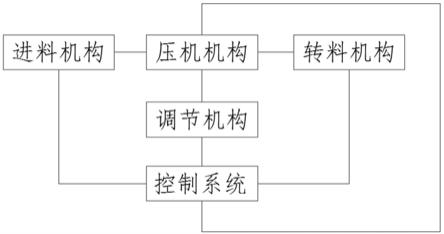
5.为解决上述技术问题,本发明提供一种压机系统,包括进料机构、转料机构和压机机构,进料机构用于向压机机构布置工件,压机机构用于对工件进行加工,转料机构用于将加工完成之后的工件转移到下一工序中,进料机构、转料机构和压机机构分别连接控制系统,控制系统用于控制三者协同工作。
6.优选的:压机机构包括压机组件和多组下模,各下模连接调节机构,调节机构用于调节各下模依次进出压机组件,压机组件用于对下模中的工件进行加工,进料机构用于向未进入压机组件中的下模布置工件,转料机构用于将加工完成离开压机组件的下模中的工件取出并转移到下一工序中,调节机构连接控制系统,控制系统用于控制进料机构、压机组件、调节机构和转料机构协同工作。
7.优选的:调节机构包括固定安装的立柱和转架,下模围绕立柱呈圆周阵列分布,各下模安装在转架上,转架和立柱构成滑动导向配合,转架连接槽轮机构,槽轮机构包括槽轮和主动拨盘,槽轮转动安装在立柱上,槽轮上的槽道数量和下模数量一致,主动拨盘和槽轮配合安装,主动拨盘用于驱使槽轮围绕立柱间歇转动,主动拨盘连接a伺服电机。
8.优选的:压机组件包括加工平台、上模和机架,加工平台和机架固定连接,加工平台上具有水平的加工平面,机架上装有曲柄滑块机构,曲柄滑块机构包括滑块和曲柄,滑块沿着铅锤方向和机架构成滑动导向配合,曲柄用于驱使滑块沿着铅锤方向往复运动,上模可拆卸式安装在滑块上,下模布置在加工平台的加工平面上,下模和上模对应分布,曲柄通过转轴连接大带轮,大带轮通过皮带连接带轮,带轮固定安装在b伺服电机的输出轴上。
9.优选的:进料机构和转料机构均为带有吸盘的工业机器人。
10.优选的:控制系统包括中央控制模块、计时模块、计算模块和位移传感器,a伺服电机、b伺服电机、工业机器人以及计时模块和位移传感器均与中央控制模块连接。
11.一种压机控制方法,包括如下步骤:
12.s1:首先启动a伺服电机,a伺服电机带动主动拨盘转动,主动拨盘带动槽轮转动,槽轮带动转架和下模转动时,位移传感器将位移信号传递给中央控制模块,中央控制模块控制负责进料和转料的工业机器人暂停,同时控制b伺服电机启动,驱使滑块带动上模脱离下模;
13.s2:当位移传感器检测到转架和下模不动时,中央控制模块控制负责进料和转料的工业机器人启动,将待加工工件布置在即将进入到加工平台上的下模中,将离开加工平台的下模中加工好的工件取出并转移到下一工序中,同时控制b伺服电机启动,带动滑块下移,带动上模下行和下模合模,实现加工。
14.s3:重复上述步骤,实现控制自动化进料、加工和转料工作。
15.优选的:中央控制模块控制a伺服电机匀速转动,在位移传感器检测到位移信号开始,计时模块计时,到位移传感器检测不到位移信号时,计时模块计时结束,在此时段内,中央控制模块将时间数据传递给计算模块,计算模块计算出b伺服电机的运行速度,并控制b伺服电机的以此速度运行,运行时,在位移传感器检测到位移信号的时段内,带动滑块从中位上移至高位再下移至中位,在位移传感器检测不到位移信号的时段内,带动滑块从中位下移至低位在从低位上移至中位。
16.优选的:工业机器人在进料和转料的过程中,采用吸盘将工件吸住。
17.优选的:工业机器人再将加工好的工件取出之后,转移至输送带上,输送带将工件输送到下一工序中
18.本发明的技术效果和优点:本发明提出的压机系统,能够实现工件的自动化进料、加工和转料处理,各机构之间分工明确,协作可靠,控制稳定,满足了现在的使用要求。
附图说明
19.图1为本发明提出的一种压机系统的组成示意图。
20.图2为本发明提出的一种压机系统中控制系统的连接框图。
21.图3为本发明提出的一种压机系统中压机机构和调节机构的结构示意图。
22.图4为本发明提出的一种压机系统中槽轮机构的结构示意图。
23.附图标记说明:100-压机机构、110-加工平台、120-机架、130-滑块、140-曲柄、150-转轴、160-大带轮、170-皮带、180-带轮、190-b伺服电机、200-下模、300-上模、400-调节机构、410-立柱、420-槽轮、430-主动拨盘。
具体实施方式
24.下面结合附图和具体实施方式对本发明作进一步详细的说明。本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
25.实施例1
26.参考图1,在本实施例中提出了一种压机系统,包括进料机构、转料机构和压机机构100,进料机构用于向压机机构100布置工件,压机机构100用于对工件进行加工,转料机构用于将加工完成之后的工件转移到下一工序中,进料机构、转料机构和压机机构100分别连接控制系统,控制系统用于控制三者协同工作。
27.参考图3,压机机构100包括压机组件和多组下模200,各下模200连接调节机构400,调节机构400用于调节各下模200依次进出压机组件,压机组件用于对下模200中的工件进行加工,进料机构用于向未进入压机组件中的下模200布置工件,转料机构用于将加工完成离开压机组件的下模200中的工件取出并转移到下一工序中,调节机构400连接控制系统,控制系统用于控制进料机构、压机组件、调节机构和转料机构协同工作。
28.参考图4,调节机构400包括固定安装的立柱410和转架430,下模200围绕立柱410呈圆周阵列分布,各下模200安装在转架430上,转架430和立柱410构成滑动导向配合,转架430连接槽轮机构,槽轮机构包括槽轮420和主动拨盘430,槽轮420转动安装在立柱410上,槽轮420上的槽道数量和下模200数量一致,主动拨盘430和槽轮420配合安装,主动拨盘430用于驱使槽轮420围绕立柱410间歇转动,主动拨盘430连接a伺服电机。
29.参考图3,压机组件包括加工平台110、上模300和机架120,加工平台110和机架120固定连接,加工平台110上具有水平的加工平面,机架120上装有曲柄滑块机构,曲柄滑块机构包括滑块130和曲柄140,滑块130沿着铅锤方向和机架120构成滑动导向配合,曲柄140用于驱使滑块130沿着铅锤方向往复运动,上模300可拆卸式安装在滑块130上,下模200布置在加工平台110的加工平面上,下模200和上模300对应分布,曲柄140通过转轴150连接大带轮160,大带轮160通过皮带170连接带轮180,带轮180固定安装在b伺服电机190的输出轴上。
30.进料机构和转料机构均为带有吸盘的工业机器人。
31.参考图2,控制系统包括中央控制模块、计时模块、计算模块和位移传感器,位移传感器安装在转架上,a伺服电机、b伺服电机190、工业机器人以及计时模块和位移传感器均与中央控制模块连接。
32.实施例2
33.在本实施例中提出了一种压机控制方法,包括如下步骤:
34.s1:首先启动a伺服电机,a伺服电机带动主动拨盘430转动,主动拨盘430带动槽轮420转动,槽轮420带动转架430和下模200转动时,位移传感器将位移信号传递给中央控制模块,中央控制模块控制负责进料和转料的工业机器人暂停,同时控制b伺服电机190启动,驱使滑块130带动上模300脱离下模200;
35.s2:当位移传感器检测到转架430和下模200不动时,中央控制模块控制负责进料和转料的工业机器人启动,将待加工工件布置在即将进入到加工平台110上的下模200中,将离开加工平台110的下模200中加工好的工件取出并转移到下一工序中,同时控制b伺服电机190启动,带动滑块130下移,带动上模300下行和下模200合模,实现加工。
36.s3:重复上述步骤,实现控制自动化进料、加工和转料工作。
37.中央控制模块控制a伺服电机匀速转动,在位移传感器检测到位移信号开始,计时模块计时,到位移传感器检测不到位移信号时,计时模块计时结束,在此时段内,中央控制
模块将时间数据传递给计算模块,计算模块计算出b伺服电机190的运行速度,并控制b伺服电机190的以此速度运行,运行时,在位移传感器检测到位移信号的时段内,带动滑块130从中位上移至高位再下移至中位,在位移传感器检测不到位移信号的时段内,带动滑块130从中位下移至低位在从低位上移至中位。
38.工业机器人在进料和转料的过程中,采用吸盘将工件吸住。
39.工业机器人再将加工好的工件取出之后,转移至输送带上,输送带将工件输送到下一工序中。
40.本发明提出的压机系统,能够实现工件的自动化进料、加工和转料处理,各机构之间分工明确,协作可靠,控制稳定,满足了现在的使用要求。
41.显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域及相关领域的普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。本发明中未具体描述和解释说明的结构、装置以及操作方法,如无特别说明和限定,均按照本领域的常规手段进行实施。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1