一种高负载的二轴机器人的制作方法
1.本发明涉及机器人技术领域,尤其涉及一种高负载的二轴机器人。
背景技术:
2.在生产中的工件在进行工位转运时通常使用搬运机器人对其搬运,随着工件精密程度的上升,对于搬运时的精度也随之上升;同时为了提高搬运的稳定性,搬运机器人在进行搬运动作时对工件的移动速度变化速率有很高的要求;目前搬运机器人主要存在提速慢、精度低、负载小等缺陷问题。
技术实现要素:
3.发明目的:为了克服现有技术中存在的不足,本发明提供一种高负载的二轴机器人可以有效提高搬运精度且增加了提速速度。
4.技术方案:为实现上述目的,本发明的一种高负载的二轴机器人,包括立柱、z轴滑板、x轴悬臂和x轴滑板;所述立柱底端设有固定脚,所述立柱顶端设有z轴架板,所述z轴架板轨道连接于z轴滑板,所述z轴架板设有z轴伺服电机驱动连接于z轴滑板;所述z轴滑板连接于x轴悬臂,所述x轴滑板轨道连接于x轴悬臂,所述x轴悬臂设有x轴伺服电机,所述x轴伺服电机通过传动机构驱动连接于x轴滑板。
5.进一步地,所述传动机构包括减速机、半程同步带和全程同步带;所述x轴伺服电机的输出端连接于减速机,所述减速机的传动端对应于半程同步带的驱动端,所述半程同步带的传动端对应于上传动齿轮,所述上传动齿轮通过传动轴同步连接于下传动齿轮,所述下传动齿轮对应于全程同步带的传动端,所述全程同步带的驱动端对应于x轴滑板的驱动齿轮。
6.进一步地,所述x轴滑板底面沿长度方向设有夹轨。
7.进一步地,所述夹轨可配合夹设气缸夹爪或电磁吸附装置。
8.进一步地,所述立柱设有油水分离器,所述油水分离器的进气端连接于外源压缩气泵,所述油水分离器的出气端对应于x轴滑板的供气端。
9.进一步地,所述z轴滑板、x轴悬臂和x轴滑板均采用铝材质制作。
10.有益效果:本发明的一种高负载的二轴机器人可以有效提高搬运精度且增加了提速速度,包括但不限于以下技术效果:
11.1)通过半程同步带和全程同步带配合可以使x轴左右行程一样,通过减速机直连同步带,减小了速比值,提高了提速效率;
12.2)通过传动机构和减速机实现传动功能,避免x轴悬臂的负载直接作用于x轴伺服电机,x轴伺服电机只发挥驱动作用,因此可以提高整体结构的大负载驱动能力;
13.3)将承重结构改为铝制品,可以降低自身重量,在负载能力不变的前提下可以提高负载重量,且空载运动时耗能更少。
附图说明
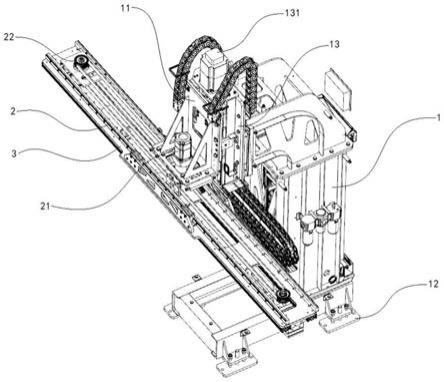
14.附图1为本发明的结构图;
15.附图2为本发明的传动机构的结构图。
具体实施方式
16.下面结合附图对本发明作更进一步的说明。
17.如附图1-2:一种高负载的二轴机器人,包括立柱1、z轴滑板11、x轴悬臂2和x轴滑板3;所述立柱1底端设有固定脚12,所述立柱1顶端设有z轴架板13,所述z轴架板13轨道连接于z轴滑板11,所述z轴架板13设有z轴伺服电机131驱动连接于z轴滑板11;所述z轴滑板11连接于x轴悬臂2,所述x轴滑板3轨道连接于x轴悬臂2,所述x轴悬臂2设有x轴伺服电机21,所述x轴伺服电机21通过传动机构22驱动连接于x轴滑板3;z轴滑板11沿z轴架板13轨道移动,带动x轴悬臂2进行上下移动,x轴滑板3沿x轴悬臂2进行左右移动,x轴滑板3可以夹取工件,并对工件进行搬运;设备中所采用的电机为高精度伺服电机,减速机221采用高精度行星减速机,所能达到的精度为3弧分。
18.所述传动机构22包括减速机221、半程同步带222和全程同步带223;所述x轴伺服电机21的输出端连接于减速机221,所述减速机221的传动端对应于半程同步带222的驱动端,所述半程同步带222的传动端对应于上传动齿轮224,所述上传动齿轮224通过传动轴225同步连接于下传动齿轮226,所述下传动齿轮226对应于全程同步带223的传动端,所述全程同步带223的驱动端对应于x轴滑板3的驱动齿轮31;使用两段同步带,通过半程同步带222和全程同步带223配合可以使x轴左右行程一样,通过减速机221直连同步带,减小了速比值,提高了提速效率;通过传动机构22和减速机221实现传动功能,避免x轴悬臂2的负载直接作用于x轴伺服电机21,x轴伺服电机21只发挥驱动作用,因此可以提高整体结构的大负载驱动能力。
19.所述x轴滑板3底面沿长度方向设有夹轨32。
20.所述夹轨32可配合夹设气缸夹爪或电磁吸附装置。
21.所述立柱1设有油水分离器,所述油水分离器的进气端连接于外源压缩气泵,所述油水分离器的出气端对应于x轴滑板3的供气端。
22.所述z轴滑板11、x轴悬臂2和x轴滑板3均采用铝材质制作;将承重结构改为铝制品,可以降低自身重量,在负载能力不变的前提下可以提高负载重量,且空载运动时耗能更少。
23.以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
技术特征:
1.一种高负载的二轴机器人,其特征在于:包括立柱(1)、z轴滑板(11)、x轴悬臂(2)和x轴滑板(3);所述立柱(1)底端设有固定脚(12),所述立柱(1)顶端设有z轴架板(13),所述z轴架板(13)轨道连接于z轴滑板(11),所述z轴架板(13)设有z轴伺服电机(131)驱动连接于z轴滑板(11);所述z轴滑板(11)连接于x轴悬臂(2),所述x轴滑板(3)轨道连接于x轴悬臂(2),所述x轴悬臂(2)设有x轴伺服电机(21),所述x轴伺服电机(21)通过传动机构(22)驱动连接于x轴滑板(3)。2.根据权利要求1所述的一种高负载的二轴机器人,其特征在于:所述传动机构(22)包括减速机(221)、半程同步带(222)和全程同步带(223);所述x轴伺服电机(21)的输出端连接于减速机(221),所述减速机(221)的传动端对应于半程同步带(222)的驱动端,所述半程同步带(222)的传动端对应于上传动齿轮(224),所述上传动齿轮(224)通过传动轴(225)同步连接于下传动齿轮(226),所述下传动齿轮(226)对应于全程同步带(223)的传动端,所述全程同步带(223)的驱动端对应于x轴滑板(3)的驱动齿轮(31)。3.根据权利要求1所述的一种高负载的二轴机器人,其特征在于:所述x轴滑板(3)底面沿长度方向设有夹轨(32)。4.根据权利要求1所述的一种高负载的二轴机器人,其特征在于:所述夹轨(32)可配合夹设气缸夹爪或电磁吸附装置。5.根据权利要求1所述的一种高负载的二轴机器人,其特征在于:所述立柱(1)设有油水分离器,所述油水分离器的进气端连接于外源压缩气泵,所述油水分离器的出气端对应于x轴滑板(3)的供气端。6.根据权利要求1所述的一种高负载的二轴机器人,其特征在于:所述z轴滑板(11)、x轴悬臂(2)和x轴滑板(3)均采用铝材质制作。
技术总结
本发明公开了一种高负载的二轴机器人,包括立柱、Z轴滑板、X轴悬臂和X轴滑板;所述立柱底端设有固定脚,所述立柱顶端设有Z轴架板,所述Z轴架板轨道连接于Z轴滑板,所述Z轴架板设有Z轴伺服电机驱动连接于Z轴滑板;所述Z轴滑板连接于X轴悬臂,所述X轴滑板轨道连接于X轴悬臂,所述X轴悬臂设有X轴伺服电机,所述X轴伺服电机通过传动机构驱动连接于X轴滑板;通过半程同步带和全程同步带配合可以使X轴左右行程一样,通过减速机直连同步带,减小了速比值,提高了提速效率;通过传动机构和减速机实现传动功能,避免X轴悬臂的负载直接作用于X轴伺服电机,X轴伺服电机只发挥驱动作用,因此可以提高整体结构的大负载驱动能力。高整体结构的大负载驱动能力。高整体结构的大负载驱动能力。
技术研发人员:赵宇
受保护的技术使用者:无锡鑫金雨智能制造有限公司
技术研发日:2021.11.04
技术公布日:2022/1/14
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1