一种VIP板及其生产用智能上料机器人的制作方法
一种vip板及其生产用智能上料机器人
技术领域
1.本发明涉及vip板生产领域,特别涉及一种vip板及其生产用智能上料机器人。
背景技术:
2.现有的vip板主要有芯材、吸气剂和阻隔膜构成,随着应用环境的变化,vip板的形状和结构一直做适用性改变,对于圆形的芯材,通常做法是在芯材表面开设圆形凹槽,再将圆形吸气剂放入圆形凹槽中,但由于芯材的作用主要是避免真空条件下外部阻隔膜的收缩和塌瘪、阻止热辐射和热传导的发生,因此,对于吸气剂的表面积、体积和放置位置都有要求,否则影响芯材的质量,因此,需要提供一种vip板及其生产用智能上料机器人解决上述问题。
技术实现要素:
3.为解决上述技术问题,本发明提供以下的技术方案:
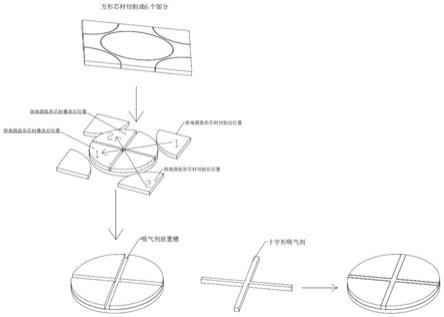
4.一种vip板,包括芯材、吸气剂和阻隔膜,芯材包括下端的圆形芯材和叠放于其上端的四个圆弧形芯材,且叠放时使用智能上料机器人完成,四个圆弧形芯材之间形成十字形区域,所述十字形区域内放置十字形吸气剂。
5.本发明还公开了一种vip板生产用智能上料机器人,包括底板,所述底板上设有转动工位台、裁切组件以及与二者配合使用的上料机器人,所述转动工位台间歇性转动
°
且其设有四个结构对称的凸块,所述裁切组件将圆形芯材切割成个部分,所述上料机器人通过凸块的触发间歇性上料并复位。
6.优选的,所述裁切组件包括安装于底板上的立架,所述立架下端安装两结构对称的气缸,两所述的气缸下端设有裁切刀。
7.优选的,所述转动工位台包括安装于底板上的转轴和电机一,所述转轴外套接齿圈且转轴上端设有托盘,所述托盘的四个拐角设有凸块,所述电机一的输出轴上连接齿轮一,所述齿轮一与齿圈啮合。
8.优选的,所述上料机器人包括安装于底板上的两个支撑架,所述支撑架上安装有滑槽,所述滑槽内设有“u”形的叠放动作杆,所述叠放动作杆下端设有吸盘,所述滑槽上设有驱动组件驱动叠放动作杆实施叠放动作,所述凸块与驱动组件间歇性抵接并触发驱动组件运动。
9.优选的,所述滑槽上滑动连接滑块组件,所述滑块组件内滑动叠放动作杆一端,所述叠放动作杆另一端以及下端分别设有齿条一和齿条二。
10.优选的,所述滑块组件包括两结构对称且分别滑动于滑槽两侧板上的滑块,所述滑块上开有腰型槽,两个腰型槽内设有两个滚柱,两个所述的滚柱间设有弹簧。
11.优选的,所述叠放动作杆的齿条一和齿条二之间的那一部分设有避让圆弧段。
12.优选的,所述驱动组件包括安装于其中一个支撑架上的电机二以及转动于滑槽一侧的齿轮二和转动于滑槽内的齿轮三,所述齿轮二和齿轮三通过皮带组件连接,所述滑槽
上安装有限位槽,所述限位槽内滑动有切换组件,所述电机二的输出轴上连接齿轮四。
13.优选的,所述切换组件包括滑动于限位槽内的顶杆,所述顶杆上端设有连接件,所述连接件上设有啮合的齿轮五和齿轮六,所述顶杆中段部分转动连接齿轮七,所述顶杆下端转动连接辊轮。
14.本发明有益效果:本发明通过设置转动工位台间歇性转动90
°
,利用裁切组件先将方形芯材切割成六个部分,其中四个拐角的圆弧形和中间的圆形料保留,剩余的为废弃料,再将四个拐角的圆弧形芯材叠放至中间的圆形芯材上,中间留出十字形区域放置十字形的吸气剂,通过设置切换组件以及与切换组件配合使用的叠放动作杆并于叠放动作杆上设有吸盘、齿条一和齿条二,使得四个拐角的圆弧形芯材依次叠放于中间的圆形芯材上,且利用凸块与辊轮抵接时,顶杆沿限位槽向上运动,叠放动作杆带着圆弧形料向上、向前运动,凸块与辊轮分离后,顶杆由于自身重力沿限位槽向下运动,叠放动作杆带着圆弧形料向后、向下运动复位;
15.用该装置得出的vip板,由于十字形的吸气剂的设置,能够增大对透过阻隔膜而进入vip板中和vip板内部芯材释放的气体的吸附,保持vip板内较高的真空度,增加了对vip板内部芯材释放的少量水气的吸附。
附图说明
16.图1为本发明的流程示意图。
17.图2为智能上料机器人的结构示意图。
18.图3为图2中转动工位台的结构示意图。
19.图4为图2中上料机器人的结构示意图。
20.图5为本发明中切换组件的结构示意图。
21.图6为本发明中滑块组件的结构示意图。
22.其中,1-底板,2-转动工位台,3-裁切组件,4-上料机器人,5-凸块,6-立架,7-气缸,8-裁切刀,9-转轴,10-电机一,11-齿圈,12-托盘,13-齿轮一,14-支撑架,15-滑槽,16-叠放动作杆,17-吸盘,18-驱动组件,19-滑块组件,20-齿条一,21-齿条二,22-电机二,24-齿轮二,25-齿轮三,26-皮带组件,27-限位槽,28-切换组件,29-齿轮四,30-顶杆,31-连接件,32-齿轮五,33-齿轮六,34-齿轮七,35-辊轮,36-滑块,37-腰型槽,38-滚柱,39-弹簧。
具体实施方式
23.为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
24.如图1至图6所示,一种vip板,包括芯材、吸气剂和阻隔膜,芯材包括下端的圆形芯材和叠放于其上端的四个圆弧形芯材,且叠放时使用智能上料机器人完成,四个圆弧形芯材之间形成十字形区域,所述十字形区域内放置十字形吸气剂。
25.本发明还公开了一种vip板生产用智能上料机器人,包括底板1,所述底板1上设有转动工位台2、裁切组件3以及与二者配合使用的上料机器人4,所述转动工位台2间歇性转动90
°
且其设有四个结构对称的凸块5,所述裁切组件3将圆形芯材切割成6个部分,所述上料机器人4通过凸块5的触发间歇性上料并复位。
26.在本实施例中,所述裁切组件3包括安装于底板1上的立架6,所述立架6下端安装两结构对称的气缸7,两所述的气缸7下端设有裁切刀8。
27.在本实施例中,所述转动工位台2包括安装于底板1上的转轴9和电机一10,所述转轴9外套接齿圈11且转轴9上端设有托盘12,所述托盘12的四个拐角设有凸块5,所述电机一10的输出轴上连接齿轮一13,所述齿轮一13与齿圈11啮合。
28.在本实施例中,所述上料机器人4包括安装于底板1上的两个支撑架14,所述支撑架14上安装有滑槽15,所述滑槽15内设有“u”形的叠放动作杆16,所述叠放动作杆16下端设有吸盘17,所述滑槽15上设有驱动组件18驱动叠放动作杆16实施叠放动作,所述凸块5与驱动组件18间歇性抵接并触发驱动组件18运动。
29.在本实施例中,所述滑槽15上滑动连接滑块组件19,所述滑块组件19内滑动叠放动作杆16一端,所述叠放动作杆16另一端以及下端分别设有齿条一20和齿条二21。
30.在本实施例中,所述滑块组件19包括两结构对称且分别滑动于滑槽15两侧板上的滑块36,所述滑块36上开有腰型槽37,两个腰型槽37内设有两个滚柱38,两个所述的滚柱38间设有弹簧39。
31.在本实施例中,所述叠放动作杆16的齿条一20和齿条二21之间的那一部分设有避让圆弧段。
32.在本实施例中,所述驱动组件18包括安装于其中一个支撑架14上的电机二22以及转动于滑槽15一侧的齿轮二24和转动于滑槽15内的齿轮三25,所述齿轮二24和齿轮三25通过皮带组件26连接,所述滑槽15上安装有限位槽27,所述限位槽27内滑动有切换组件28,所述电机二22的输出轴上连接齿轮四29。
33.在本实施例中,所述切换组件28包括滑动于限位槽27内的顶杆30,所述顶杆30上端设有连接件31,所述连接件31上设有啮合的齿轮五32和齿轮六33,所述顶杆30中段部分转动连接齿轮七34,所述顶杆30下端转动连接辊轮35。
34.工作过程与原理:先将方形芯材置于转动工位台2的托盘12上,启动气缸7,裁切刀8下行,将方形芯材切割成六个部分,其中四个拐角的圆弧形和中间的圆形料需要保留,剩余的为废弃料;
35.再将四个拐角的圆弧形芯材叠放至中间的圆形芯材上,中间留出的十字形区域即为放置十字形吸气剂的位置,具体操作如下:
36.启动电机一10,使得齿轮一13转动,从而与其啮合的齿圈11带着转轴9转动,托盘12带着凸块5转动,当其中一个凸块5与辊轮35抵接时,辊轮35转动的同时带着顶杆30沿限位槽27向上运动,并使得齿轮七34与齿轮四29、齿轮二24啮合,启动电机二22正转,使得齿轮四29转动,从而使得齿轮七34、齿轮二24转动,又由于设置的皮带组件26,从而使得齿轮三25转动,与齿轮三25啮合的齿条一20带着整个叠放动作杆16向上吸起其中一个拐角的圆弧形料运动,随着齿条一20向上运动,使得齿轮三25与叠放动作杆16下端的齿条二21啮合,从而使得叠放动作杆16带着圆弧形料向前运动至其对角方向(如图1所示),吸盘17将该圆弧形料放下;
37.随着托盘12转动,当凸块5与辊轮35分离时,切换组件28由于自身重力作用下落,顶杆30沿限位槽27向下运动,且齿轮七34与齿轮四29、齿轮二24分离,但连接件31上的齿轮六33与齿轮四29啮合、齿轮五32与齿轮二24啮合,并且使得齿轮二24、齿轮三25反转,从而
使得叠放动作杆16向后运动复位,当齿轮三25与齿条一20啮合时,带着整个叠放动作杆16向下运动复位,以此类推,将四个拐角处的圆弧形芯材叠放至中间的圆形芯材上,中间留出十字形放置十字形吸气剂的位置。
38.本发明通过设置转动工位台2间歇性转动90
°
,利用裁切组件3先将方形芯材切割成六个部分,其中四个拐角的圆弧形和中间的圆形料保留,剩余的为废弃料,再将四个拐角的圆弧形芯材叠放至中间的圆形芯材上,中间留出十字形区域放置十字形的吸气剂,通过设置切换组件28以及与切换组件28配合使用的叠放动作杆16并于叠放动作杆16上设有吸盘17、齿条一20和齿条二21,使得四个拐角的圆弧形芯材依次叠放于中间的圆形芯材上,且利用凸块5与辊轮35抵接时,顶杆30沿限位槽27向上运动,叠放动作杆16带着圆弧形料向上、向前运动,凸块5与辊轮35分离后,顶杆30由于自身重力沿限位槽27向下运动,叠放动作杆16带着圆弧形料向后、向下运动复位;
39.用该装置得出的vip板,由于十字形的吸气剂的设置,能够增大对透过阻隔膜而进入vip板中和vip板内部芯材释放的气体的吸附,保持vip板内较高的真空度,增加了对vip板内部芯材释放的少量水气的吸附。
40.由技术常识可知,本发明可以通过其它的不脱离其精神实质或必要特征的实施方案来实现。因此,上述公开的实施方案,就各方面而言,都只是举例说明,并不是仅有的。所有在本发明范围内或在等同于本发明的范围内的改变均被本发明包含。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1