应变仪及机器人的制作方法
1.本发明涉及检测在对象物的被测量部分上产生的变形的应变仪及机器人,特别地涉及在向该被测量部分安装的安装结构上具有特征的应变仪及在其一部分上配备有该应变仪的工业用等的机器人。
背景技术:
2.以往,已知各种的应变仪。作为其中之一,已知专利文献1中记载的结构的应变仪。该文献中记载的应变仪是将圆环状的膜片和在膜片的外周缘一体形成的圆环状的凸台的相互连续的端面设为位于同一平面上的平坦面部分,将应变仪的电阻线粘贴在膜片侧的平坦面部分,将用于将电阻线与引线连接的端子粘贴在凸台侧的平坦面部分的应变仪(参照专利文献1)。
3.在专利文献1中,成为这样的安装结构:不同于在弯曲的表面部分粘贴应变仪的情况,由于能够在平坦面部分可靠地粘贴应变仪,因此能够避免剥离等导致的可靠性下降,并且由于端子粘贴在没有弹性变形的凸台侧的平坦面部分,因此该部分也有可能反复遭受弹性变形而发生断线。
4.在先技术文献
5.专利文献
6.专利文献1:日本特开2005-69402号公报
技术实现要素:
7.发明所要解决的技术问题
8.但是,专利文献1中所述的应变仪的安装结构只能应用于被测量部分(膜片)与不发生弹性变形的部分(凸台)相邻并且它们是平坦的这样的结构中,能够应用的结构/用途受限。
9.本发明是为了解决上述技术问题而做出的,其主要目的在于提供一种具有能够提高耐久性并且能够应用于更多结构的安装结构的应变仪及搭载有该应变仪的机器人。
10.用于解决技术问题的技术手段
11.用于解决上述技术问题的第一方案是,
12.一种在被测量部分安装应变仪的结构,
13.所述应变仪具备:膜状或者板状的基底部件;电阻元件,设置在所述基底部件上;第一布线,设置在所述基底部件上并且与所述电阻元件连接;端子,设置在所述基底部件上并且与所述第一布线连接;以及第二布线,与所述端子连接;
14.所述基底部件中的设置有所述电阻元件的第一基底部分粘接到所述被测量部分,
15.所述基底部件中的设置有所述端子的第二基底部分以未粘接到被测量部分的被测量部件的方式被安装。
16.根据上述结构,所述应变仪具备:基底部件;电阻元件,设置在所述基底部件上;第
一布线,设置在所述基底部件上并且与所述电阻元件连接;端子,设置在所述基底部件上并且与所述第一布线连接;以及第二布线,与所述端子连接。所述基底部件中的设置有所述电阻元件的第一基底部分粘接到所述被测量部分。
17.因此,能够根据被测量部分的变形使设置在第一基底部分上的电阻元件变形。然后,通过经由与端子连接的第二布线来测量电阻元件的电阻值,能够基于电阻元件的电阻值的变化来测量被测量部分的变形。另外,能够将应变仪的各结构部分汇集于一个基底部件,使得应变仪的操作变得容易。
18.另一方面,所述基底部件中的设置有所述端子的第二基底部分未粘接到被测量部件。因此,即使被测量部分发生了变形,也能够抑制设置在第二基底部分的端子变形。由此,能够抑制应力反复作用于端子上,能够抑制端子与第二布线之间的连接部损伤。进一步,由于无需在与被测量部分相邻的部分粘接第二基底部分,因此能够更加自由地设定与被测量部分相邻的部分的结构。由此,能够提供一种应变仪的安装结构,其能够提高耐久性并且能够应用于更多的结构/用途中。
19.在第二方案中,所述第一布线从所述电阻元件朝向规定方向延伸,所述端子从所述第一布线朝向规定方向延伸,并且在所述规定方向上所述第一布线的长度比所述端子的长度更长。
20.根据上述结构,所述第一布线从所述电阻元件朝向规定方向延伸,所述端子从所述第一布线朝向规定方向延伸。因此,能够从电阻元件向规定方向拉出第一布线以及端子。而且,在所述规定方向上,所述第一布线的长度比所述端子的长度更长。由此,能够通过基底部件中的设置有第一布线的部分(以下称为“第三基底部分”)来抑制在被测量部分上产生的变形经由基底部件传递至第二基底部分。
21.在第三方案中,在所述规定方向上,所述电阻元件的长度比所述端子的长度更长,在所述规定方向上,所述第一布线的长度比所述电阻元件的长度更长。
22.根据上述结构,在所述规定方向上,所述第一布线的长度比所述电阻元件的长度(>端子的长度)更长。由此,能够通过上述第三基底部分有效地抑制在被测量部分上产生的变形经由基底部件传递至第二基底部分。进一步,在将第一基底部分通过粘合剂向被测量部分粘接的情况下,即使粘合剂溢出到第一基底部分的外侧,也能够通过第三基底部分来抑制粘合剂到达第二基底部分进而抑制第二基底部分粘接到被测量部件。
23.在第四方案中,构成所述被测量部分的被测量部件从所述被测量部分延伸至与所述第二基底部分相对置的位置,所述第二基底部分与所述被测量部件相抵接。即使是这样的结构,第二基底部分与被测量部件(即,被测量系统的部件)不粘接,因此能够发挥与第一方案相同的作用效果。
24.另外,在第五方案中,在构成所述被测量部分的被测量部件与所述第二基底部分之间形成有规定空间。根据这样的结构,能够有效地利用规定空间。
25.在基底部件中与被测量部分相对置的一侧的面上设置有端子的情况下,将第二布线与端子连接的时候被测量部件有可能成为妨碍。
26.对于这一点,以第五方案为前提,在第六方案中,所述端子设置在所述基底部件中与所述被测量部分相对置的一侧的面上。根据这样的结构,在被测量部件与设置有端子的第二基底部分之间形成有上述规定空间,因此能够抑制将第二布线与端子连接的时候被测
量部件成为妨碍。
27.具体地,以第一方案至第六方案中的任一方案为前提,如第七方案那样,能够采用将所述端子与所述第二布线通过锡焊连接这样的结构。根据这样的结构,由于以能够抑制应力反复作用于端子的结构为前提,因此能够抑制锡焊出现裂纹或者端子与锡焊之间的边界破裂。
28.具体地,如第八方案那样,能够采用具备第一方案至第七方案中任一方案所述的应变仪的安装结构的机器人这样的结构。
附图说明
29.在附图中:
30.图1是应变仪的安装结构的俯视图。
31.图2是应变仪的安装结构的侧视图。
32.图3是应变仪的安装结构的比较例的俯视图。
33.图4是应变仪的安装结构的比较例的侧视图。
34.图5是应变仪的安装结构的变形例的侧视图。
35.图6是应变仪的安装结构的其他变形例的侧视图。
36.图7是应变仪的安装结构的其他变形例的侧视图。
37.附图标记说明
38.10:应变仪
39.11:薄膜(基底部件)
40.13:热固性树脂(粘合剂)
41.20:电阻元件
42.30:印刷布线(第一布线)
43.40:印刷端子(端子)
44.50:导线(第二布线)
45.55:锡焊
46.90:被测量部件
47.91:被测量部分
48.110:应变仪
49.111:薄膜(基底部件)
50.140:印刷端子(端子)
51.190:被测量部件
52.210:应变仪
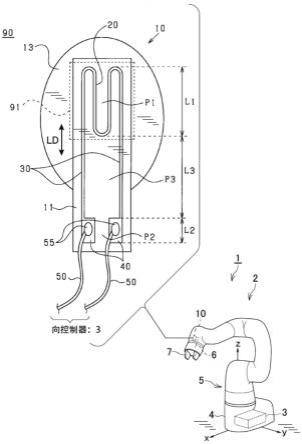
53.211:薄膜(基底部件)
54.910:应变仪
55.911:薄膜
具体实施方式
56.下面,参照附图,对工业用机器人以及设置在该机器人的臂的关节上的应变仪的
一个实施方式进行说明。
57.机器人的控制器(控制部)检测设置在应变仪上的电阻材料的金属箔(以下,简单称作电阻元件)的电阻值,并基于该电阻值的变化来测量被测量部分上产生的变形。控制器基于测量出的变形,计算作用于机器人的关节上的转矩。即,应变仪用作检测转矩的转矩传感器。此外,这样计算转矩的方法为公知方法,因此省略详细的说明。另外,机器人也可以是人型机器人。
58.对图1所示的机器人系统1进行说明。该机器人系统1具备作为垂直多关节型机器人的六轴垂直多关节型机器人2以及控制该机器人2的运动的控制器3。该机器人2在基座4上设置有具有第一轴(关节)至第五轴(关节)的多关节型的臂构件5,并且该臂构件5的顶端以可旋转的方式设置有第六轴(关节)6。经由该第六轴6以可扭转的方式连接有手部7。作为一例,在提供第六轴6的关节(被测量部件)的一部分构件(被测量部分)上设置有应变仪10。另外,作为应变仪的安装的另一例,在日本特开2019-144236中进行了例示。如该示例所示,可以在用于安装设置在关节上的电机的转矩变换器的一部分上设置应变仪。
59.当然,机器人2不限于六轴垂直多关节型,也可以是其他的类型。另外,设置应变仪10的位置不限于第六轴的关节部分,也可以是其他的关节部分。各轴上还设置有与各轴相对应并成为驱动源的未图示的电机。
60.如图1、图2所示,应变仪10被构成为输出与在机器人2的臂构件5的关节6等被测量部件90的被测量部分91上产生的变形相对应的、电气的电阻值的变化。该应变仪10与控制器3的测量电路(未图示)电连接,并通过该测量电路测量变形。
61.作为一例,应变仪10具备薄膜11、电阻元件20(金属箔等)、印刷布线30、印刷端子40、导线50、锡焊55等。此外,在图2中,省略了电阻元件20、印刷布线30以及印刷端子40的图示。
62.薄膜11(基底部件)例如通过聚酰亚胺(绝缘性树脂)形成为矩形的膜状。
63.电阻元件20在薄膜11的上表面(一侧的面)上通过电阻材料形成为(设置成)规定的图案(形状)。电阻元件20形成在膜11的占据长度方向ld的一端侧的一部分面积的范围的部分。
64.印刷布线30(第一布线)在薄膜11的上表面上通过电阻材料或者导电材料形成为(设置成)直线状。印刷布线30连接到电阻元件20,印刷布线30从薄膜11的长度方向的一侧朝向另一侧(规定方向)从电阻元件20延伸。
65.印刷端子40(端子)在薄膜11的上表面上通过电阻材料或者导电材料形成为(设置成)矩形形状。印刷端子40连接到印刷布线30,印刷端子40从薄膜11的长度方向的一侧朝向另一侧(规定方向)从印刷布线30延伸。
66.在薄膜11的长度方向上,电阻元件20的长度l1比印刷端子40的长度l2更长。在薄膜11的长度方向上,印刷布线30的长度l3比印刷端子40的长度l2以及电阻元件20的长度l1更长。
67.导线50(第二布线)通过导电材料形成为线状。导线50通过锡焊55连接到印刷端子40。
68.电阻元件20以折回的方式形成在薄膜11的表面上,薄膜11具有第一薄膜部分p1(构成第一基底部分),第一薄膜部分p1具有包含应变仪长度的长度方向ld的长度。该第一
薄膜部分p1的表面上例如通过热固性树脂13(粘合剂)粘接(粘贴)有被测量部分91。另外,如图所示,薄膜11在其长度方向ld上的第一薄膜部分p1的相反侧具有第二薄膜部分p2(构成第二基底部分)。进一步,在该长度方向ld上,薄膜11的第一薄膜部分p1和第二薄膜部分p2经由位于它们之间的第三薄膜部分p3(构成第三基底部分)连续地连结。第三薄膜部分p3设置为对振动等的缓冲用途。
69.构成被测量部分91的被测量部件90从被测量部分91延伸至与第二薄膜部分p2相对置的位置。即,被测量部件90的与第一薄膜部分p1、第三薄膜部分p3以及第二薄膜部分p2相对置的面成为位于同一平面上的平面。
70.但是,薄膜11中的形成有印刷端子40的第二薄膜部分p2未粘接到关节6等的被测量部件90(即,被测量系统的部件)。即,第二薄膜部分p2离开被测量部件90。
71.热固性树脂13将第一薄膜部分p1与薄膜11中的形成有印刷布线30的第三薄膜部分p3的一部分粘接到被测量部件90,第二薄膜部分p2未粘接到被测量部件90。
72.热固性树脂13可以仅将第一薄膜部分p1粘接到被测量部件90,但是有时候溢出到第一薄膜部分p1的外侧。在这种情况下,热固性树脂13可以将第三薄膜部分p3也粘接到被测量部件90。薄膜11具有挠性,第二薄膜部分p2与被测量部件90实际上抵接。此外,第二薄膜部分p2与被测量部件90也可以不抵接。
73.在上述结构的应变仪10的安装结构中,当机器人动作时,在被测量部件90上例如如箭头a1所示发生变形。伴随于此,如箭头a2所示,薄膜11中的通过热固性树脂13粘接到被测量部件90的部分也发生变形。因此,在第一薄膜部分p1上形成的电阻元件20(例如,金属箔)变形,电阻元件20的电阻值发生变化。然后,机器人2的控制器3例如具备桥电路(未图示),并通过该桥电路来测量电阻元件20的电阻值。控制器3基于该电阻值的变化来测量被测量部分91的变形。控制器3基于测量出的变形,计算作用于机器人2的关节6上的转矩。
74.在此,第二薄膜部分p2未粘接到被测量部件90。因此,即使在被测量部件90上如箭头a1所示发生了变形,该变形也不会传递至第二薄膜部分p2。进一步,由于在第一薄膜部分p1与第二薄膜部分p2之间存在缓冲用的第三薄膜部分p3,因此有效地抑制了应变传递至第二薄膜部分p2。由此,抑制了应力反复作用于第二薄膜部分p2。
75.图3是应变仪的安装结构的比较例的俯视图,图4是应变仪的安装结构的比较例的侧视图。此外,对与图1、图2相同的部分赋予相同的附图标记。
76.应变仪910的薄膜911不具备上述第三薄膜部分p3。应变仪910不具备上述印刷布线30。而且,电阻元件20与印刷端子40连接。
77.第一薄膜部分p1以及第二薄膜部分p2通过热固性树脂13被粘接到被测量部件90。即,薄膜911整体通过热固性树脂13被粘接到被测量部件90。
78.当机器人动作时,在被测量部件90上如箭头a1所示发生变形。随后,如箭头a2所示,薄膜911整体也发生变形。因此,应力反复作用于第二薄膜部分p2,容易造成锡焊55出现裂纹或者印刷端子40与锡焊55之间的边界破裂。
79.以上详细说明的本实施方式参照上述比较例,具有以下优点。
80.·
薄膜11中的设置有电阻元件20的第一薄膜部分p1粘接到被测量部分91。因此,能够根据被测量部分91的应变,使设置在第一薄膜部分p1上的电阻元件20变形。然后,通过经由连接到印刷端子40的导线50来测量电阻元件20的电阻值,能够基于电阻元件20的电阻
值的变化来测量被测量部分91的变形。另外,能够将应变仪的各构成部分汇集于一个薄膜11,应变仪10的操作变得容易。
81.·
薄膜11中的设置有印刷端子40的第二薄膜部分p2未粘接到其他部件(即,被测量部件90)。因此,即使在被测量部分91上发生了变形,也能够抑制设置在第二薄膜部分p2上的印刷端子40变形。由此,能够抑制应力反复作用于印刷端子40,能够抑制印刷端子40与导线50之间的连接部损伤。进一步,由于无需在与被测量部分91相邻的部分上粘接第二薄膜部分p2,因此能够更加自由地设定与被测量部分91相邻的部分的结构。由此,能够提供一种应变仪10的安装结构,其能够提高耐久性,并且能够应用于更多的结构。
82.·
印刷布线30从电阻元件20朝向规定方向延伸,印刷端子40从印刷布线30朝向规定方向延伸。因此,能够从电阻元件20向规定方向拉出印刷布线30以及印刷端子40。而且,在规定方向上,印刷布线30的长度l3比印刷端子40的长度l2更长。由此,能够通过薄膜11中的设置有印刷布线30的第三薄膜部分p3来抑制在被测量部分91上产生的变形经由薄膜11传递至第二薄膜部分p2。
83.·
在规定方向上,印刷布线30的长度l3比电阻元件20的长度l1(>印刷端子40的长度l2)更长。由此,能够通过上述第三薄膜部分p3有效地抑制在被测量部分91上产生的变形经由薄膜11传递至第二薄膜部分p2。进一步,在将第一薄膜部分p1通过热固性树脂13粘接到被测量部分91的情况下,即使热固性树脂13溢出到第一薄膜部分p1的外侧,也能够通过第三薄膜部分p3来抑制热固性树脂13到达第二薄膜部分p2进而抑制第二薄膜部分p2被粘接到被测量部件90。
84.·
构成被测量部分91的被测量部件90从被测量部分91延伸至与第二薄膜部分p2相对置的位置,第二薄膜部分p2与被测量部件90抵接。即使是这样的结构,由于第二薄膜部分p2与被测量部件90未粘接,因此能够发挥上述作用效果。
85.·
印刷端子40与导线50通过锡焊55连接。如上所述,能够抑制应力反复作用于印刷端子40,因此能够抑制锡焊55出现裂纹或者印刷端子40与锡焊55之间的边界破裂。
86.此外,也能够将上述实施方式如下所示进行变更来实施。对与上述实施方式相同的部分,赋予相同的附图标记并省略说明。
87.·
如图5所示,还能够将在柔性印刷电路基板15(印刷电路基板)上形成的印刷端子(省略图示)与上述印刷端子40通过锡焊55等连接。
88.·
如图6所示,可以在构成被测量部分91的被测量部件190与第二薄膜部分p2之间形成有规定空间s。根据这样的结构,能够有效地利用规定空间s。在应变仪110中,电阻元件20、印刷布线30以及印刷端子40设置在薄膜111中的与被测量部分91相对置的一侧的面111b的相反侧的面111a上。另一方面,印刷端子140设置在薄膜111中的与被测量部分91相对置的一侧的面111b上。而且,印刷端子40与印刷端子140通过贯穿薄膜111的导电部件70连接。
89.根据上述结构,在被测量部件190与设置有印刷端子140的第二部分p2之间形成有上述规定空间s,因此能够抑制在将导线50向印刷端子140连接时被测量部件190成为妨碍。
90.·
如图7所示,在构成被测量部分91的被测量部件190与第二薄膜部分p2之间形成有规定空间s。电阻元件20、印刷布线30以及印刷端子40设置在薄膜211中的与被测量部分91相对置的一侧的面211b上。而且,薄膜211的面211b通过热固性树脂13被粘接到被测量部
件190。
91.根据上述结构,在被测量部件190与设置有印刷端子40的第二薄膜部分p2之间形成有上述规定空间s,因此能够抑制将导线50向印刷端子40连接时被测量部件190成为妨碍。此外,在应变仪210中,可以通过由聚酰亚胺等形成的罩层来覆盖电阻元件20(第一薄膜部分p1)以及印刷布线30(第三薄膜部分p3)。另外,在上述实施方式中也同样地,可以通过由聚酰亚胺等形成的罩层来覆盖电阻元件20(第一薄膜部分p1)以及印刷布线30(第三薄膜部分p3)。
92.·
也能够通过胶带等将第一薄膜部分p1粘接(粘贴)到被测量部分91。
93.·
也能够取代薄膜11、111、211,由板状的基板构成基底部件。
94.·
印刷布线30不限于直线状的形状,也可以是弯曲状的形状。在这种情况下,薄膜11、111、211中的设置有印刷端子40、140的第二薄膜部分p2除导线50以外也不粘接到被测量部件90的部件即可,即,从被测量部件90浮起即可。
95.·
应变仪10、110、210的安装结构不限于应用于工业用机器人或人型机器人,也能够应用于其他产业机械或一般机械。另外,应变仪10、110、210的安装结构也能够应用于减速机或电机。另外,应变仪10、110、210不限于用作转矩传感器,也能够用作力传感器。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1