一种带伸缩结构可自动抓取的机械手臂的制作方法
1.本发明涉及机械手领域,尤其涉及一种带伸缩结构可自动抓取的机械手臂。
背景技术:
2.机械手,指能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。其主要由执行机构、驱动机构和控制系统三大部分组成。它可代替人进行繁重劳动以实现生产的机械化和自动化,广泛应用于机械制造、轻工和原子能等部门。
3.现有的机械手臂多利用轴关节转动或者各种梁架进行移动,这种机械手体积大,且工作时需要的转动空间大,配置在机械手臂末端的执行机构转动不灵活,无法满足在狭小空间内进行自动抓取作业。
4.因此,有必要提供一种新的带伸缩结构可自动抓取的机械手臂解决上述技术问题。
技术实现要素:
5.为解决上述技术问题,本发明提供一种体积小、伸缩转动灵活的带伸缩结构可自动抓取的机械手臂。
6.本发明提供的带伸缩结构可自动抓取的机械手臂包括:连接臂、伸缩机构、调节机构和夹持机构,连接臂一端固定连接有安装架,所述安装架的支撑端内侧壁上对称设有直线导轨,所述直线导轨上滑动安装有安装座,所述安装座内嵌装有中空球形杆,所述中空球形杆内部嵌装有电动缸,所述电动缸的输出端穿过中空球形杆固定连接有连接板,用于驱动安装座伸缩移动的所述伸缩机构安装于安装架和安装座上,用于驱动中空球形杆进行万向调节的所述调节机构设置于中空球形杆的靠近连接臂一端,用于自动抓取物料的所述夹持机构固定安装于连接板上。
7.优选的,所述中空球形杆包括中空管和球头套,所述球头套套设在中空管末端,所述安装座内部固定安装有球座,所述球头套与球座滑动连接。
8.优选的,所述连接板上对称设置有导向杆,两个所述导向杆一端与连接板固定连接,两个导向杆的另一端插设在中空管侧壁开设的通孔中。
9.优选的,所述伸缩机构包括齿条板、驱动箱、转动轴、直齿轮、第一圆锥齿轮、第一伺服电机和第二圆锥齿轮,两个所述齿条板对称安装于安装架的上表面,所述驱动箱固定安装于安装座的上表面,所述转动轴通过轴承转动安装于驱动箱内,且转动轴两端均穿过驱动箱固定连接有直齿轮,所述直齿轮与同侧的齿条板啮合,所述第一圆锥齿轮套设在转动轴上并位于驱动箱内部,所述第一伺服电机固定安装于驱动箱的上表面,且第一伺服电机的输出轴伸入驱动箱内部并固定连接有第二圆锥齿轮,所述第二圆锥齿轮和第一圆锥齿轮啮合。
10.优选的,所述调节机构包括连接座、摆动板、摆动架、第一驱动组件、连接杆和第二
驱动组件,所述连接座固定安装于球头套上,且连接座的侧壁上焊接有连接块,两个所述摆动板对称设置于安装座的侧壁上并与安装座转动连接,且两个摆动板一侧均设有第一驱动组件,所述摆动架固定安装于两个摆动板上,且摆动架呈圆弧状,且摆动架中部开设有圆弧槽,所述连接块插设在圆弧槽中并与圆弧槽滑动连接,所述连接杆固定安装于连接块穿过圆弧槽的一端,且连接杆上设有第二驱动组件。
11.优选的,所述第一驱动组件包括第二伺服电机和第一齿轮,所述摆动板上固定安装有摆动轴,所述摆动轴与安装座通过转动连接,且摆动轴一端套设有第二齿轮,所述第二伺服电机固定安装于安装座上并位于摆动轴的上方,且第二伺服电机的输出轴上套设有第一齿轮,所述第一齿轮与第二齿轮啮合。
12.优选的,所述第二驱动组件包括双联气缸和滑套,所述双联气缸固定安装于摆动架上,且双联气缸的伸缩端固定安装有滑套,所述滑套与连接杆滑动连接。
13.优选的,所述滑套数量为两个,且两个滑套对称设置于双联气缸的伸缩端上,两个滑套之间的间距等于摆动架的宽度。
14.优选的,所述夹持机构包括摆动气缸、法兰连接件、第三驱动组件、夹持架、v型夹持爪和连接头,所述摆动气缸固定安装于连接板上,且摆动气缸的输出端固定安装有法兰连接件上,所述第三驱动组件固定安装于法兰连接件上,第三驱动组件伸缩端固定安装有连接头,所述夹持架固定安装于法兰连接件上,两个所述v型夹持爪对称设置于夹持架上并与夹持架转动连接,且两个所述v型夹持爪上贯穿开设有滑槽,所述连接头的两个圆柱分别插设在同侧v型夹持爪的滑槽中。
15.优选的,所述第三驱动组件为电动伸缩杆、液压缸或气缸中任意一种。
16.与相关技术相比较,本发明提供的带伸缩结构可自动抓取的机械手臂具有如下有益效果:
17.1、通过在连接臂上设置伸缩机构,伸缩机构利用齿条板、驱动箱、转动轴、直齿轮、第一圆锥齿轮、第一伺服电机和第二圆锥齿轮配合使用可以推动安装座进行移动伸缩,安装座上设置电动缸进一步推动俩连接板进行移动伸缩,双重移动可以机械手工作时,同时伸出,伸缩便捷,且收缩后机械手体积小;
18.2、通过设置万向调节机构,利用连接座、摆动板、摆动架、第一驱动组件、连接杆和第二驱动组件可以对中空球形杆进行万向调节提高了机械手的灵活性,机械手的夹持机构通过摆动气缸、法兰连接件、第三驱动组件、夹持架、v型夹持爪和连接头配合,便于机械手在狭小空间内进行作业。
附图说明
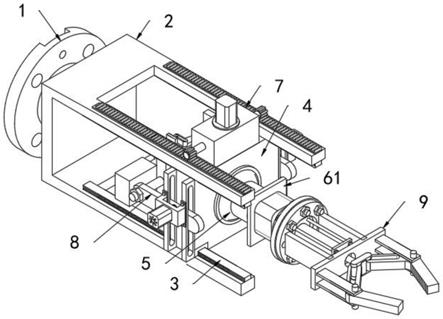
19.图1为本发明提供的带伸缩结构可自动抓取的机械手臂的一种较佳实施例的结构示意图;
20.图2为图1所示的中空球形杆和安装座的内部结构示意图;
21.图3为图1所示的伸缩机构的结构示意图;
22.图4为图1所示的调节机构的结构示意图;
23.图5为图4所示的a的局部放大图;
24.图6为图4所示的b的局部放大图;
25.图7为图1所示的夹持机构的结构示意图。
26.图中标号:1、连接臂;2、安装架;3、直线导轨;4、安装座;41、球座;5、中空球形杆;51、中空管;52、球头套;6、电动缸;61、连接板;62、导向杆;7、伸缩机构;71、齿条板;72、驱动箱;73、转动轴;74、直齿轮;75、第一圆锥齿轮;76、第一伺服电机;77、第二圆锥齿轮;8、调节机构;81、连接座;811、连接块;82、摆动板;821、摆动轴;822、第二齿轮;83、摆动架;831、圆弧槽;84、第一驱动组件;841、第二伺服电机;842、第一齿轮;85、连接杆;86、第二驱动组件;861、双联气缸;862、滑套;9、夹持机构;91、摆动气缸;92、法兰连接件;93、第三驱动组件;94、夹持架;95、v型夹持爪;951、滑槽;96、连接头。
具体实施方式
27.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
28.以下结合具体实施例对本发明的具体实现进行详细描述。
29.请参阅图1至图7,本发明实施例提供的一种带伸缩结构可自动抓取的机械手臂。带伸缩结构可自动抓取的机械手臂包括连接臂1、伸缩机构7、调节机构8和夹持机构9。
30.连接臂1,连接臂1一端固定连接有安装架2,安装架2的支撑端内侧壁上对称设有直线导轨3,直线导轨3上滑动安装有安装座4,安装座4内嵌装有中空球形杆5,中空球形杆5内部嵌装有电动缸6,电动缸6的输出端穿过中空球形杆5固定连接有连接板61,用于驱动安装座4伸缩移动的伸缩机构7安装于安装架2和安装座4上,用于驱动中空球形杆5进行万向调节的调节机构8设置于中空球形杆5的靠近连接臂1一端,用于自动抓取物料的夹持机构9固定安装于连接板61上。
31.需要说明的是:使用时,位于连接臂1末端的夹持机构9通过电动缸6推动连接板61移动伸缩,伸缩机构7推动安装座4带动电动缸6移动伸缩,电动缸6和伸缩机构7可实现快速双重伸缩,减小了机械手的体积的同时,满足器伸缩需求量,再通过调节机构8上,可以对中空球形杆5进行快速万向调节,使得机械手更加灵活。
32.参考图1和图2所示,中空球形杆5包括中空管51和球头套52,球头套52套设在中空管51末端,安装座4内部固定安装有球座41,球头套52与球座41滑动连接。
33.需要说明的是:中空球形杆5通过球头套52与安装座4内部的球座41进行配合工作,球头套52可以带动中空管51围绕球座41进行万向转动。
34.参考图1和图2所示,连接板61上对称设置有导向杆62,两个导向杆62一端与连接板61固定连接,两个导向杆62的另一端插设在中空管51侧壁开设的通孔中。
35.需要说明的是:通过在连接板61上设置导向杆62既可以提高连接板61的移动平稳性,又可以提高连接板61的支撑强度。
36.参考图1和图3所示,伸缩机构7包括齿条板71、驱动箱72、转动轴73、直齿轮74、第一圆锥齿轮75、第一伺服电机76和第二圆锥齿轮77,两个齿条板71对称安装于安装架2的上表面,驱动箱72固定安装于安装座4的上表面,转动轴73通过轴承转动安装于驱动箱72内,且转动轴73两端均穿过驱动箱72固定连接有直齿轮74,直齿轮74与同侧的齿条板71啮合,第一圆锥齿轮75套设在转动轴73上并位于驱动箱72内部,第一伺服电机76固定安装于驱动
箱72的上表面,且第一伺服电机76的输出轴伸入驱动箱72内部并固定连接有第二圆锥齿轮77,第二圆锥齿轮77和第一圆锥齿轮75啮合.
37.需要说明的是:伸缩机构7使用时,通过控制第一伺服电机76启动,第一伺服电机76带动第二圆锥齿轮77转动,第二圆锥齿轮77与第一圆锥齿轮75啮合传动,第一圆锥齿轮75带动转动轴73转动,转动轴73驱动直齿轮74在齿条板71上移动,从而驱动安装座4在直线导轨3上移动,从而实现安装座4的移动伸缩。
38.参考图1、图4、图5和图6所示,调节机构8包括连接座81、摆动板82、摆动架83、第一驱动组件84、连接杆85和第二驱动组件86,连接座81固定安装于球头套52上,且连接座81的侧壁上焊接有连接块811,两个摆动板82对称设置于安装座4的侧壁上并与安装座4转动连接,且两个摆动板82一侧均设有第一驱动组件84,摆动架83固定安装于两个摆动板82上,且摆动架83呈圆弧状,且摆动架83中部开设有圆弧槽831,连接块811插设在圆弧槽831中并与圆弧槽831滑动连接,连接杆85固定安装于连接块811穿过圆弧槽831的一端,且连接杆85上设有第二驱动组件86.
39.需要说明的是:调节机构8使用时,通过第一驱动组件84驱动两个摆动板82带动摆动架83进行转动,摆动架83通过连接块811和连接座81带动中空球形杆5进行一个方向的转动,通过第二驱动组件86控制连接杆85进行移动,连接杆85通过连接块811和连接座81带动中空球形杆5进行另一个方向的转动,两个转动方向组合实现对中空球形杆5进行万向调节。
40.其中,第一驱动组件84包括第二伺服电机841和第一齿轮842,摆动板82上固定安装有摆动轴821,摆动轴821与安装座4通过转动连接,且摆动轴821一端套设有第二齿轮822,第二伺服电机841固定安装于安装座4上并位于摆动轴821的上方,且第二伺服电机841的输出轴上套设有第一齿轮842,第一齿轮842与第二齿轮822啮合,这样通过控制第二伺服电机841转动,第二伺服电机841通过第一齿轮842与第二齿轮822啮合传动,从而实现带动摆动板82转动,安装座4上还设有限制摆动板82转动的限位架,便于摆动板82可以进行稳定转动。
41.其中,第二驱动组件86包括双联气缸861和滑套862,双联气缸861固定安装于摆动架83上,且双联气缸861的伸缩端固定安装有滑套862,滑套862与连接杆85滑动连接,滑套862数量为两个,且两个滑套862对称设置于双联气缸861的伸缩端上,两个滑套862之间的间距等于摆动架83的宽度,这样通过双联气缸861的伸缩端伸出或者收缩时带动滑套862进行移动,滑套862推动连接杆85带动连接块811在圆弧槽831内转动,从而实现对中空球形杆5的调节,两个滑套862之间的间距等于摆动架83的宽度,这样两个滑套862滑动时紧贴摆动架83的侧壁,可以减少转动调节时的振动,提高调节的稳定性。
42.参考图1和图7所示,夹持机构9包括摆动气缸91、法兰连接件92、第三驱动组件93、夹持架94、v型夹持爪95和连接头96,摆动气缸91固定安装于连接板61上,且摆动气缸91的输出端固定安装有法兰连接件92上,第三驱动组件93固定安装于法兰连接件92上,第三驱动组件93伸缩端固定安装有连接头96,夹持架94固定安装于法兰连接件92上,两个v型夹持爪95对称设置于夹持架94上并与夹持架94转动连接,且两个v型夹持爪95上贯穿开设有滑槽951,连接头96的两个圆柱分别插设在同侧v型夹持爪95的滑槽951中。
43.需要说明的是:夹持机构9使用时,通过第三驱动组件93带动连接头96的移动,连
接头96向前移动时,连接头96通过圆柱在滑槽951内前滑动,带动两个v型夹持爪95张开,然后两个v型夹持爪95在机械手的移动下靠近工件,然后控制连接头96向后移动,连接头96通过圆柱在滑槽951内后滑动,带动两个v型夹持爪95靠近完成对工件的自动抓取,且摆动气缸91控制法兰连接件92进行转动,从而带动两个v型夹持爪95进行转动,进一步提高两个v型夹持爪95的抓取能力。
44.其中,所述第三驱动组件93为电动伸缩杆、液压缸或气缸中任意一种,可以根据具有需求进行灵活配置。
45.本发明提供的工作原理如下:
46.使用时,通过第三驱动组件93带动连接头96的移动,连接头96向前移动时,连接头96通过圆柱在滑槽951内前滑动,带动两个v型夹持爪95张开,然后两个v型夹持爪95在机械的伸缩机构7和调节机构8的的调节下靠近工件,伸缩机构7通过控制第一伺服电机76启动,第一伺服电机76带动第二圆锥齿轮77转动,第二圆锥齿轮77与第一圆锥齿轮75啮合传动,第一圆锥齿轮75带动转动轴73转动,转动轴73驱动直齿轮74在齿条板71上移动,从而驱动安装座4在直线导轨3上移动,从而实现安装座4的移动伸缩,安装座4上设置电动缸6进行二级组合伸缩,调节机构8通过第一驱动组件84驱动两个摆动板82带动摆动架83进行转动,摆动架83通过连接块811和连接座81带动中空球形杆5进行一个方向的转动,通过第二驱动组件86控制连接杆85进行移动,连接杆85通过连接块811和连接座81带动中空球形杆5进行另一个方向的转动,两个转动方向组合实现对中空球形杆5进行万向调节,靠近后,然后控制连接头96向后移动,连接头96通过圆柱在滑槽951内后滑动,带动两个v型夹持爪95靠近完成对工件的自动抓取,且摆动气缸91控制法兰连接件92进行转动,从而带动两个v型夹持爪95进行转动,进一步提高两个v型夹持爪95的抓取能力。
47.本发明中涉及的电路以及控制均为现有技术,在此不进行过多赘述。
48.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1