一种用于自动驾驶测试的遥控机器人的制作方法
1.本实用新型涉及自动驾驶测试技术领域,具体涉及一种用于自动驾驶测试的遥控机器人。
背景技术:
2.自动驾驶汽车(autonomous vehicles;self
‑
driving automobile)又称无人驾驶汽车、电脑驾驶汽车或轮式移动机器人,是一种通过电脑系统控制实现无人驾驶的智能汽车。无人驾驶汽车是集环境感知、智能决策以及规划和控制等功能于一体的复杂系统。
3.毫米波雷达,是工作在毫米波波段(millimeter wave)探测的雷达,通常毫米波为30~300ghz频域(波长为1~10mm)的,毫米波的波长介于微波和厘米波之间,因此毫米波雷达兼具微波雷达和光电雷达的特点,具有高距离分辨率、高测距精度、高速度分辨率、高测量精度、体积小等优点,逐渐广泛应用于汽车自动驾驶技术领域。
4.众所周知,在自动驾驶技术领域,车辆对行人的识别能力和控制决策能力是研发的重点,自动驾驶汽车在研制的过程中需要大量的实验来验证其识别能力和智能决策水平是否已经达到完全自主控制的效果。现有技术中,采用毫米波雷达识别方案的自动驾驶汽车行人识别测试过程中有两种行人方案,第一种是采用真人进行测试,该方案不仅效率低且存在安全隐患,第二种采用塑料或橡胶材料的人形模具(仿真人),因毫米波可以穿透塑料、玻璃等材质,故常用的塑料或橡胶材质制作而成的人形模具无法精确反应真人的识别效果,因此这种人形模具不能满足毫米波雷达的识别要求,目前亟需一种经过精确标定人形模具和可以模拟行人的运动方式的人形机器人,以满足采用毫米波雷达识别方案的自动驾驶汽车的测试要求,并助推自动驾驶汽车的识别能力和智能决策水平的提升。
5.有鉴于此,本发明人专门针对毫米波雷达识别方案设计了一种用于自动驾驶测试的遥控机器人。
技术实现要素:
6.本实用新型的目的在于提供一种用于自动驾驶测试的遥控机器人,其采用铜箔覆盖人形模具的方式获得模拟真人对毫米波雷达的反射率,满足自动驾驶汽车的识别能力和智能决策水平的测试要求,通过遥控器远程控制机器人模型动作,安全性高,可调整设置运行参数和反馈实时数值,测试的精确性高,而且具备可重复性和可度量性从而提高测试精确度和测试效率。
7.为实现上述目的,本实用新型采用的技术方案是:
8.一种用于自动驾驶测试的遥控机器人,包括机器人模型和遥控器;
9.所述机器人模型由小车和固定在小车上的人形模具组成,所述小车包括控制模块、检测模块、第一发送模块和第一接收模块,所述第一发送模块连接检测模块,第一接收模块连接控制模块;所述人形模具的各个部位覆盖有一定厚度和密度的铜箔;
10.所述遥控器包括控制信号输入模块、显示模块、第二发送模块和第二接收模块,所
述第二发送模块连接控制信号输入模块,该第二发送模块与所述第一接收模块之间通讯连接,所述第二接收模块连接显示模块,该第二接收模块与第一发送模块通讯连接。
11.进一步的,人形模具各个部位的铜箔的厚度和密度根据铜箔的覆盖方式进行调整,铜箔覆盖方式可以采用单层、双层或多层覆盖。
12.进一步的,所述单层覆盖方式采用点阵式排布覆盖或平铺式排布覆盖,所述双层或多层铜箔的覆盖方式为交叉堆叠覆盖。
13.进一步的,所述小车还包括电源模块和实时数据存储模块,电源模块与小车的各模块电连接,所述实时数据存储模块与控制模块和检测模块分别连接。
14.进一步的,所述电源模块采用可充电锂电池,实时数据存储模块采用sd卡或usb外接存储设备,所述小车和遥控器上均设有与控制模块连接的电源开关和状态灯。
15.进一步的,所述小车还包括底盘和四个车轮,所述控制模块、检测模块、第一发送模块、第一接收模块均安装在底盘上,所述控制模块包括单片机、电机驱动器、转向器、伺服电机,单片机连接电机驱动器、转向器和第一接收模块,伺服电机连接电机驱动器、转向器和车轮。
16.进一步的,所述人形模具材质为塑料或橡胶,所述底盘采用钢化玻璃制成,所述车轮直径为6cm。
17.进一步的,所述检测模块包括与第二发送模块连接的转速传感器和角度传感器。
18.进一步的,所述第一发送模块、第一接收模块、第二发送模块和第二接收模块采用lora模块、蓝牙模块或zigbee模块。
19.进一步的,所述显示模块设有设定值显示区和实时值显示区,所述控制信号输入模块包括启/停按钮、前进按钮、后退按钮、加速按钮、减速按钮、左转向按钮、右转向按钮、停车按钮。
20.采用上述方案后,本实用新型的控制过程包括以下步骤:
21.步骤一、手动通过遥控器的控制信号输入模块输入控制指令,该控制指令为包含启动、停止、前进、后退、加速、减速和/或转向动作的信息和速度、角度信息,控制指令通过第二发送模块远程发送至小车的第一接收模块;
22.步骤二、小车的控制模块从第一接收模块获取控制指令,并根据该控制指令控制小车进行启动、停止、前进、后退、加速、减速和/或转向动作;
23.步骤三、在小车动作时检测模块检测的转速和转向角度数据,并通过第一发送模块将转速和转向角度数据远程发送至第二接收模块;
24.步骤四、遥控器的显示模块从第二接收模块获取转速和转向角度数据,实时显示当速度和转向角数值。
25.进一步的,在控制指令通过第二发送模块远程发送至小车的第一接收模块以及第一发送模块将转速和转向角度数据远程发送至第二接收模块时,通过频段或检验码进行区别且通讯过程中的数据在传输前和接收后分别进行编码和解码处理。
26.采用上述方案后,本实用新型具有以下优点:
27.1、本实用新型具有广泛的适用性:采用一定厚度和密度的铜箔覆盖人形模具的设计可模拟真人对毫米波雷达的反射率,铜箔厚度和密度(覆盖面积)通过精确测试和标定,达到和真人识别95%的相似度的识别效果,以满足自动驾驶汽车对真人场景的精缺识别和
测试,不仅适用于毫米波雷达方案的测试,也可适用于视觉摄像头、激光雷达、及超声波雷达的行人识别方案测试。
28.2、采用遥控控制方式,测试人员远离测试现场,提高安全系数;
29.3、通过遥控器可调整设置运行参数(如速度、转向角),且可以反馈实时数值,具备可重复性和可度量性从而提高测试精确度和测试效率。
附图说明
30.图1和图2为本实用新型的机器人模型立体图;
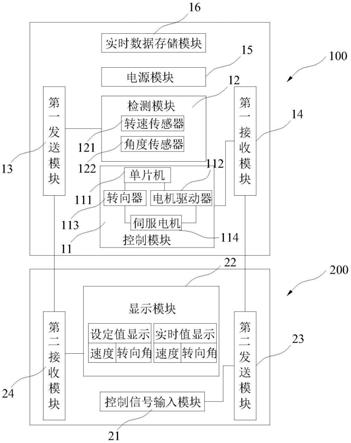
31.图3为本实用新型的结构框图;
32.图4为点阵式排布铜箔覆盖示意图;
33.图5为平铺式排布铜箔覆盖示意图;
34.图6为双层或多层铜箔的交叉堆叠覆盖示意图。
35.标号说明:
36.机器人模型100,小车1,控制模块11,单片机111,电机驱动器112,转向器113,伺服电机114,检测模块12,转速传感器121,角度传感器122,第一发送模块13,第一接收模块14,电源模块15,实时数据存储模块16,底盘17,车轮18,人形模具2,铜箔3;
37.遥控器200,控制信号输入模块21,显示模块22,设定值显示区221,实时值显示区222,第二发送模块23,第二接收模块24。
具体实施方式
38.如图1
‑
3所示,本实用新型揭示了一种用于自动驾驶测试的遥控机器人,包括机器人模型100和遥控器200;
39.上述机器人模型100由小车1和固定在小车1上的人形模具2组成,所述小车1包括控制模块11、检测模块12、第一发送模块13和第一接收模块14;该控制模块11可根据控制指令控制小车1进行启动、停止、前进、后退、加速、减速和/或转向动作;所述检测模块12用于检测小车1动作时的转速和转向角度数据,所述第一发送模块13连接检测模块12,第一接收模块14连接控制模块11;所述人形模具2的各个部位覆盖有一定厚度和密度的铜箔3;
40.上述遥控器200包括控制信号输入模块21、显示模块22、第二发送模块23和第二接收模块24,所述控制信号输入模块21用于输入控制指令,所述第二发送模块23连接控制信号输入模块21,该第二发送模块23与所述第一接收模块14之间通讯连接,所述第二接收模块24连接显示模块22,该第二接收模块24与第一发送模块13通讯连接;
41.作为进一步优选的实施例,人形模具2各个部位的铜箔3的厚度和密度根据铜箔3的覆盖方式进行调整,铜箔3覆盖方式可以采用单层、双层或多层覆盖,如图4和5所示,单层覆盖方式采用点阵式排布覆盖或平铺式排布覆盖,如图6所示,所述双层或多层铜箔3的覆盖方式为交叉堆叠覆盖。
42.作为进一步优选的实施例,所述小车1还包括电源模块15和实时数据存储模块16,电源模块与小车1的各模块电连接,所述实时数据存储模块16与控制模块11和检测模块12分别连接,电源模块15采用可充电锂电池,实时数据存储模块16采用sd卡或usb外接存储设备,实时数据存储模块16会将运动信息进行记录存储。记录信息以某种格式进行记录,如文
本格式文件进行存储。该实时数据存储模块16的数据采用sd卡存储读取或usb接口下载等方式获取,可以满足测试人员测试数据回放及分析,对被测产品开发完善起到重要促进作用。上述小车1和遥控器200上均设有与控制模块11连接的电源开关和状态灯(图中未示出)。
43.作为进一步优选的实施例,小车1还包括底盘17和四个车轮18,控制模块11、检测模块12、第一发送模块13、第一接收模块14均安装在底盘上,上述控制模块11包括单片机111(或小型工控机)、电机驱动器112、转向器113、伺服电机114,单片机111连接电机驱动器112、转向器113和第一接收模块14,伺服电机114连接电机驱动器112、转向器113和车轮,单片机111用于根据控制指令给电机驱动器112和转向器113分别下发执行指令,电机驱动器112和转向器113用于根据执行指令控制伺服电机114动作以驱动车轮进行启动、停止、前进、后退、加速、减速和/或转向动作。上述单片机11(或小型工控机)采用市面上常见的产品便可满足本实用新型的使用需求,人形模具2材质为塑料或橡胶,底盘17采用钢化玻璃制成,车轮18直径为6cm。
44.作为进一步优选的实施例,上述检测模块12包括与第二发送模块23连接的转速传感器121和角度传感器122,转速传感器121和角度传感器122分别用于将检测到的转速、转向实际值发送给实时数据存储模块16和第二发送模块23,从而远程传输到第一接收模块14,最后在显示模块22进行显示。
45.进一步的,所述第一发送模块13、第一接收模块14、第二发送模块23和第二接收模块24采用lora模块、蓝牙模块或zigbee模块,其中lora模块为基于lpwan的远距离无线通信模块,支持lorawan标准协议,如rn2483型号lora模块。
46.进一步的,所述显示模块22设有设定值显示区221和实时值显示区222,设定值显示区221用于显示设定的速度及转向角数值,实时值显示区222用于显示检测到的当前速度和转向角数值,所述控制信号输入模块21包括启/停按钮、前进按钮、后退按钮、加速按钮、减速按钮、左转向按钮、右转向按钮、停车按钮,各个按钮对应机器人的控制动作。
47.本实施例还提供一种用于自动驾驶测试的遥控机器人的具体控制方法,包括以下步骤:
48.步骤一、通过遥控器200的控制信号输入模块21输入控制指令,该控制指令为包含启动、停止、前进、后退、加速、减速和/或转向动作的信息和速度、角度信息,控制指令通过第二发送模块23远程发送至小车1的第一接收模块14;
49.步骤二、小车1的控制模块11从第一接收模块14获取控制指令,并根据该控制指令控制小车1进行启动、停止、前进、后退、加速、减速和/或转向动作,具体是控制伺服电机114的正转、反转、加速、停车,转向器113的转向角度等;
50.步骤三、在小车1动作时检测模块12检测的转速和转向角度数据,并通过第一发送模块13将转速和转向角度数据远程发送至第二接收模块24;
51.步骤四、遥控器200的显示模块22从第二接收模块24获取转速和转向角度数据,实时显示当速度和转向角数值。
52.在控制指令通过第二发送模块23远程发送至小车1的第一接收模块14以及第一发送模块13将转速和转向角度数据远程发送至第二接收模块24时,通过频段或检验码进行区别,发送的无线的信号只会被对应的接收端接收而不影响其他接收端的工作避免信号冲
突,通讯过程中的数据在传输前和接收后分别进行编码和解码处理。
53.以上所述仅为本实用新型实施实例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1