用于粘贴扣子的机械手的制作方法
1.本实用新型涉及一种机械手,尤指一种用于粘贴扣子的机械手。
背景技术:
2.目前生产头盔的产业,许多零配件的组装都是倚靠人力,以头盔内衬装配多数扣子为例,过去都是人工用手将带有强力黏性的扣子从蜡光纸上剥下来,再依序粘贴在头盔内侧面。
3.这种用手一个一个将扣子从蜡光纸上取下,再一个一个粘贴到头盔内侧面的重复性工序,不但速度慢,工作效率低,也容易造成操作员手部伤害,而扣子在装配过程中如果有粘贴位置不一致的情形,必须剥离重贴,又增加了生产成本。
4.中国第202010941471.8号发明专利申请公开了“头盔扣子装配机械手”,以机械手的上钳和下钳模仿人食指及拇指将一部分扣子夹在上下钳之间,上钳受气压推动向下将扣子往下钳夹紧,机械手通过坐标定位将抓起的扣子移动到头盔内衬预定粘贴位置,使扣子与头盔的衬吻碰,将上钳向上脱离原夹取位置,使气压杆得以向下点压将扣子粘贴在头盔内衬预定位置。
5.上述机械手从抓起扣子,再将扣子粘贴在头盔内衬的动作过程,是否稳定夹取扣子、吻碰及下压到位等工序及其相对应所需装配,将直接影响粘贴良率及生产成本。
技术实现要素:
6.实用新型目的:有鉴于此,本实用新型以自动化机械手取代人工粘贴头盔扣子,有效降低劳动成本,并以机械化作业完成的一致性,提升生产效率及生产良率。
7.技术方案:用于粘贴扣子的机械手,包括固定基座,固定基座与外部多轴式机械手设备连接,接受该设备控制在自由空间作多方向轨迹移动,固定基座向自由端延伸为一手臂轴,自由端装置有夹爪模块,该夹爪模块系由多个辐射状延伸的转贴头均匀布设而成。
8.在本实用新型的一个实施例中,该手臂轴上设有气压调节阀。
9.在本实用新型的一个实施例中,该夹爪模块由四个辐射状延伸的转贴头均匀布设而成。
10.在本实用新型的一个实施例中,该夹爪模块由三个辐射状延伸的转贴头均匀布设而成。
11.在本实用新型的一个实施例中,转贴头包括伸缩气缸及魔术贴。
12.在本实用新型的一个实施例中,该手臂轴上的气压调节阀能够调控转贴头伸缩气缸的力度。
附图说明
13.图1为本实用新型公开的用于粘贴扣子的机械手的工作示意图一;
14.图2为本实用新型公开的用于粘贴扣子的机械手的工作示意图二;
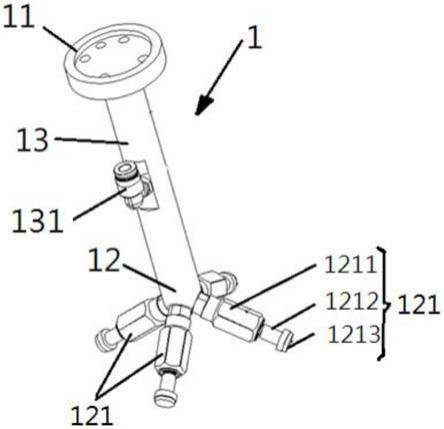
15.图3为本实用新型公开的用于粘贴扣子的机械手的结构图;
16.图4为本实用新型公开的用于粘贴扣子的机械手取料的实施示意图。
17.其中:
18.具体实施方式:
19.为利于本领域技术人员了解本实用新型的技术特征、内容与优点及其所能达成的功效,下面将本实用新型配合附图,并以实施例的表达形式详细说明如下:
20.其中所使用的附图,其主旨仅为示意及辅助说明书的用,未必为本实用新型实施后的真实比例与精准配置,故不应就所附附图的比例与配置关系解读、局限本实用新型于实际实施上的权利范围。
21.如图3所示,用于粘贴扣子的机械手1是以固定基座11与外部多轴式机械手设备2连接,接受外部多轴式机械手设备2控制在自由空间作多方向轨迹移动,固定基座11向自由端12延伸为一手臂轴13,该手臂轴13上设有气压调节阀131,自由端12装置有夹爪模块;其中,该夹爪模块由四个辐射状延伸的转贴头1211所构成,任一个转贴头1211包括一伸缩气缸1212及魔术贴1213。
22.请同时参阅图1
‑
4,用于粘贴扣子的机械手1受多轴式机械手设备2控制移动至送料台3,用于粘贴扣子的机械手1的夹爪模块分四次,每次旋转90度,以转贴头魔术贴1213各自由送料台3上粘取一个扣子31,再度接受多轴式机械手设备2控制移动至装配台4,令其夹爪模块分四次,每次旋转90度,将上述魔术贴1213上的扣子31依序粘贴在头盔41内的预定位置。
23.当魔术贴1213上的扣子粘贴在头盔41内预定位置时,为了避免粘贴接触刚性造成压痕,上述气压调节阀131可调控转贴头1211伸缩气缸的力度,以缓冲两者接触时的刚性。
24.在上述的实施例中,夹爪模块由四个辐射状延伸的转贴头所构成,因此粘取扣子及粘贴扣子都以四次,每次旋转90度完成。但并不因此限制夹爪模块转贴头的数量。换言之,视需要,该夹爪模块的转贴头如果设为三个,则黏取扣子及粘贴扣子将分三次,每次旋转 120度完成。
25.综上所述,本实用新型公开的用于粘贴扣子的机械手与现有技术比较,具有以下优点:
26.1.以自动化机械手取代人工粘贴头盔扣子,有效降低劳动成本;
27.2.以自动化机械手分成四次,每次旋转90度的方式,快速且稳固的将扣子依序粘贴至头盔内衬预定位置,机械化作业完成的一致性,有益于生产效率及生产良率的提升。
28.以上所述,仅为本实用新型最佳具体实施例,惟本实用新型的构造特征并不局限于此,任何本领域技术人员在本实用新型领域内,可轻易思及的变化或修饰,皆可涵盖在以下本案的专利范围。
技术特征:
1.用于粘贴扣子的机械手,包括固定基座,所述固定基座向自由端延伸为一手臂轴,所述自由端装置有夹爪模块,其特征在于:该夹爪模块是由多个辐射状延伸的转贴头均匀布设而成。2.如权利要求1所述用于粘贴扣子的机械手,其特征在于,该手臂轴上设有气压调节阀。3.如权利要求1所述用于粘贴扣子的机械手,其特征在于,该夹爪模块由四个辐射状延伸的转贴头均匀布设而成。4.如权利要求1所述用于粘贴扣子的机械手,其特征在于,该夹爪模块由三个辐射状延伸的转贴头均匀布设而成。5.如权利要求1或3所述用于粘贴扣子的机械手,其特征在于,所述转贴头包括有伸缩气缸及魔术贴。6.如权利要求2所述用于粘贴扣子的机械手,其特征在于,该手臂轴上的气压调节阀用于调控转贴头上的伸缩气缸的力度。
技术总结
本实用新型公开了一种用于粘贴扣子的机械手,包括固定基座,所述固定基座向自由端延伸为一手臂轴,所述自由端装置有夹爪模块,其特征在于:该夹爪模块是由多个辐射状延伸的转贴头均匀布设而成。本实用新型公开的用于粘贴扣子的机械手与现有技术比较,具有以下优点:1.以自动化机械手取代人工粘贴头盔扣子,有效降低劳动成本;2.以自动化机械手分成四次,每次旋转90度的方式,快速且稳固的将扣子依序粘贴至头盔内衬预定位置,机械化作业完成的一致性,有益于生产效率及生产良率的提升。有益于生产效率及生产良率的提升。有益于生产效率及生产良率的提升。
技术研发人员:王宁 钟健杰
受保护的技术使用者:惠州韬略运动器材有限公司
技术研发日:2021.03.10
技术公布日:2021/12/24
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1