一种电气自动化实验用的机械夹持臂的制作方法
1.本实用新型涉及电气自动化设备技术领域,尤其涉及一种电气自动化实验用的机械夹持臂。
背景技术:
2.电气自动化技术成人高考专业是培养具有一定的电子技术、微机控制技术和计算机网络技术的基础知识;熟悉常用电气设备的工作原理,掌握应用计算机技术实现电气控制的基本原理和方法,具有较强的自动控制系统运行、维护、系统集成及一定的工程设计能力和企业管理能力的高等技术应用性专门人才。电气自动化技术专业主要培养掌握电气技术、电力自动化技术、各种电气设备及自动化设备的基本原理和分析方法,能够从事供用电、各类电气设备、电气控制及自动化系统的安装、设计、调试、维护、技术改造、产品开发和技术管理的高级技术应用性专门人才。
3.电气自动化设备中常使用到机械夹持臂,现有机械夹持臂的结构复杂,操作繁琐,难以满足实际中的需求,为此我们提出一种电气自动化实验用的机械夹持臂。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种电气自动化实验用的机械夹持臂。
5.为达到以上目的,本实用新型采用的技术方案为:一种电气自动化实验用的机械夹持臂,包括k形固定板,所述k形固定板的右端上下两部均通过合页活动铰接有三角夹持板,两个所述三角夹持板相远离的一侧均设置有弹力机构,所述k形固定板的左端固定连接有伺服电机,所述伺服电机的输出端固定连接有齿轮,所述k形固定板的左端前后两部均固定连接有支撑板,两个所述支撑板的前端均开凿有方孔,两个所述方孔内均滑动连接有滑动板,两个所述滑动板相靠近的一端均固定连接有齿条,两个所述齿条均啮合连接于齿轮,前部所述齿条的下端和后部齿条的上端均固定连接有连接块,两个所述连接块的右侧均设置有连接机构。
6.优选的,所述弹力机构包括三角连接板和弹簧,所述三角连接板固定连接于k形固定板的上端,所述弹簧的下端固定连接于上部三角夹持板的上端,所述弹簧的上端固定连接于三角连接板的下端。
7.优选的,所述连接机构包括圆孔、牵引绳、固定环和套管,所述固定环固定连接于上部三角夹持板的下端,所述套管套设于固定环,所述牵引绳的右端固定连接于套管的左端,所述圆孔开凿于k形固定板的左端,所述牵引绳活动插接于圆孔内,所述牵引绳的左端固定连接于上部连接块的右端。
8.优选的,两个所述滑动板相远离的一端均固定连接有限位板,两个所述限位板的长度分别大于两个方孔的长度。
9.优选的,两个所述三角夹持板的表面均包裹有橡胶套,且两个橡胶套的表面均刻
有防滑纹。
10.优选的,两个所述三角夹持板均选用不锈钢材质,且两个三角夹持板的表面均作镀锌处理。
11.与现有技术相比,本实用新型具有以下有益效果:
12.(1)本方案中打开伺服电机,伺服电机的输出端旋转带动齿轮旋转,齿轮的旋转带动两个齿条向相远离的一端移动,两个滑动板在两个方孔内滑动,两个齿条带动两个连接块向相远离的一端移动,两个连接块拉动两个牵引绳在两个圆孔内移动,两个牵引绳拉动两个套管向左移动,两个套管拉动两个固定环向左移动,两个固定环带动两个三角夹持板向相靠近的一端旋转,两个弹簧被拉伸,实现对物体进行抓取,关闭伺服电机后,伺服电机的输出端可以自由旋转,在弹簧的弹性复位下,两个三角夹持板向相远离的一端移动,实现放下抓取物。
13.(2)本方案中设置有滑动板和方孔,滑动板在方孔内滑动有益于防止齿条旋转,防止齿条和齿轮发生滑牙。
附图说明
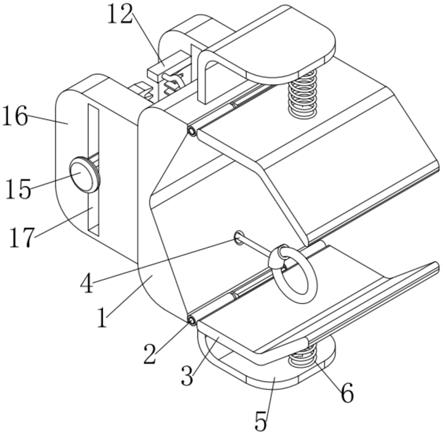
14.图1为本实用新型的立体图;
15.图2为本实用新型的立体爆炸图;
16.图3为本实用新型齿条处的立体图;
17.图4为本实用新型套管处的立体图。
18.图中:k形固定板1、合页2、三角夹持板3、圆孔4、三角连接板5、弹簧6、牵引绳7、套管8、固定环9、伺服电机10、齿轮11、连接块12、齿条13、滑动板14、限位板15、支撑板16、方孔17。
具体实施方式
19.以下描述用于揭露本实用新型以使本领域技术人员能够实现本实用新型。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。
20.如图1
‑
4所示的一种电气自动化实验用的机械夹持臂,包括k形固定板1,k形固定板1的右端上下两部均通过合页2活动铰接有三角夹持板3,两个三角夹持板3相远离的一侧均设置有弹力机构,k形固定板1的左端固定连接有伺服电机10,伺服电机10的输出端固定连接有齿轮11,k形固定板1的左端前后两部均固定连接有支撑板16,两个支撑板16的前端均开凿有方孔17,两个方孔17内均滑动连接有滑动板14,两个滑动板14相靠近的一端均固定连接有齿条13,两个齿条13均啮合连接于齿轮11,前部齿条13的下端和后部齿条13的上端均固定连接有连接块12,两个连接块12的右侧均设置有连接机构。
21.本实施例中,打开伺服电机10,伺服电机10的输出端旋转带动齿轮11旋转,齿轮11的旋转带动两个齿条13向相远离的一端移动,两个滑动板14在两个方孔17内滑动,两个齿条13带动两个连接块12向相远离的一端移动,两个连接块12拉动两个牵引绳7在两个圆孔4内移动,两个牵引绳7拉动两个套管8向左移动,两个套管8拉动两个固定环9向左移动,两个固定环9带动两个三角夹持板3向相靠近的一端旋转,两个弹簧6被拉伸,实现对物体进行抓取,关闭伺服电机10后,伺服电机10的输出端可以自由旋转,在弹簧6的弹性复位下,两个三
角夹持板3向相远离的一端移动,实现放下抓取物,对于本领域技术人员而言,伺服电机10为现有技术,不对其作过多赘述。
22.具体的,弹力机构包括三角连接板5和弹簧6,三角连接板5固定连接于k形固定板1的上端,弹簧6的下端固定连接于上部三角夹持板3的上端,弹簧6的上端固定连接于三角连接板5的下端。
23.本实施例中,弹簧6的设置便于关闭伺服电机10后在弹簧6的弹性复位下带动两个三角夹持板3向相远离的一端旋转,便于将两个三角夹持板3之间的夹持物放下。
24.具体的,连接机构包括圆孔4、牵引绳7、固定环9和套管8,固定环9固定连接于上部三角夹持板3的下端,套管8套设于固定环9,牵引绳7的右端固定连接于套管8的左端,圆孔4开凿于k形固定板1的左端,牵引绳7活动插接于圆孔4内,牵引绳7的左端固定连接于上部连接块12的右端。
25.本实施例中,牵引绳7的设置便于连接套管8和连接块12,套管8的设置便于连接牵引绳7和固定环9,套管8在固定环9的表面滑动,防止牵引绳7拉动过程中方向改变造成断裂。
26.具体的,两个滑动板14相远离的一端均固定连接有限位板15,两个限位板15的长度分别大于两个方孔17的长度。
27.本实施例中,限位板15的设置有益于防止滑动板14脱离方孔17,限位板15对滑动板14起到限位作用。
28.具体的,两个三角夹持板3的表面均包裹有橡胶套,且两个橡胶套的表面均刻有防滑纹。
29.本实施例中,橡胶套的设置有益于提高三角夹持板3和抓取物之间的摩擦力,防滑纹的设置有益于防止抓取物从两个三角夹持板3之间掉落。
30.具体的,两个三角夹持板3均选用不锈钢材质,且两个三角夹持板3的表面均作镀锌处理。
31.本实施例中,选用不锈钢材质有益于防止三角夹持板3和水接触被腐蚀损坏,延长了本装置的使用寿命,镀锌处理使本装置更加美观。
32.本实用新型工作原理:
33.打开伺服电机10,伺服电机10的输出端旋转带动齿轮11旋转,齿轮11的旋转带动两个齿条13向相远离的一端移动,两个滑动板14在两个方孔17内滑动,两个齿条13带动两个连接块12向相远离的一端移动,两个连接块12拉动两个牵引绳7在两个圆孔4内移动,两个牵引绳7拉动两个套管8向左移动,两个套管8拉动两个固定环9向左移动,两个固定环9带动两个三角夹持板3向相靠近的一端旋转,两个弹簧6被拉伸,实现对物体进行抓取,关闭伺服电机10后,伺服电机10的输出端可以自由旋转,在弹簧6的弹性复位下,两个三角夹持板3向相远离的一端移动,实现放下抓取物。
34.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是本实用新型的原理,在不脱离本实用新型精神和范围的前提下本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型的范围内,本实用新型要求的保护范围由所附的权利要求书及其等同物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1