一种基于六轴机器人的多功能装配机械手爪
1.在本实用新型涉及工业机器人技术领域,属于一种六轴机器人与多功能机械抓手相结合对不同外形、金属或非金属零件加以装配与抓取的装置。
背景技术:
2.机械手爪经常用于物品的夹持与搬运,但每种手爪的功能较为单一,对于不同外形、不同材质零件的夹取没有针对性,满足不了不同的工作要求,导致其工作不稳定,工作效率较低。且不同种类机械手爪更换不方便。
技术实现要素:
3.为提高对于不同零件的装配及抓取的效率,增加机械手爪的功能,本实用新型提供了一种基于六轴机器人的多功能装配机械手爪。
4.一种基于六轴机器人的多功能装配机械手爪,包括六轴机器人、夹取手爪、吸盘手爪、电磁吸盘手爪、以及带导杆薄型气缸;所述机械手爪通过顶板上端与六轴机器人末端相连接,机械手爪的带导杆薄型气缸固定于顶板下端正中央,吸盘手爪和电磁吸盘手爪固定于顶板的两侧,与夹取手爪呈45
°
;本实用新型分别通过带导杆薄型气缸带动两侧的机械手爪开合运动、吸盘内外产生的压力差、电磁吸盘内部线圈通电产生的电磁力达到了其对金属或非金属零件的装配与抓取的目的。
5.所述机械手爪,其特征在于所述顶板有数个通孔用以通过螺钉连接安装于六轴机器人末端,其两侧开有通孔及凹槽以安装夹取手爪连接轴用以连接夹取手爪;所述夹取手爪通过夹取手爪连接轴安装于顶板正下方,并由带导杆薄型气缸为动力带动两侧的夹取手爪开合运动从而实现其对表面不规则零件的装配与夹取的目的;吸盘手爪与电磁吸盘手爪分别安装在顶板两侧,且与夹取手爪呈45
°ꢀ
,吸盘手爪的吸盘连接真空发生器,使吸盘内外产生压力差,针对于表面较为平整的零件;电磁吸盘手爪通过内部线圈通电产生的电磁力来实现对金属零件的装配。根据六轴机器人的转动来实现三个手爪的切换工作。
6.所述的机械手爪其特征在于整个机械手爪由三个不同功能的手爪组成,分别为夹取手爪、吸盘手爪、电磁吸盘手爪。吸盘手爪、电磁吸盘手爪分别固定在夹取手爪的两侧;夹取手爪利用带导杆薄型气缸带动其做开合运动,并通过导杆来实现夹取工作;吸盘手爪侧臂上的吸盘与真空发生器连接,通过对零件的吸附完成工作;电磁吸盘手爪通过内部线圈通电产生的电磁力完成工作。
7.本实用新型所提出的一种基于六轴机器人的多功能装配机械手爪装置,其多功能机械手爪整体安装于六轴机器人末端随六轴机器人运动而实现搬运的目的,六轴机器人更加灵活,可进行旋转与直线运动;其总体结构简单紧凑,功能多,切换方便,有利于维护与维修,可适用于不同工作要求。
附图说明
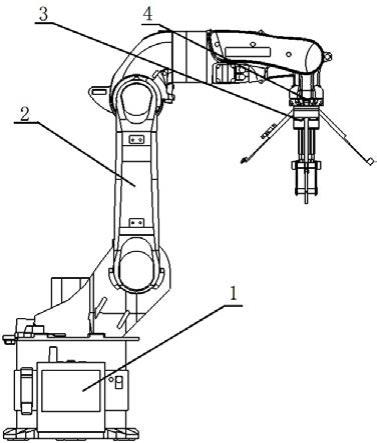
8.图1为一种基于六轴机器人的多功能装配机械手爪的整体结构示意图。
9.图2为一种基于六轴机器人的多功能装配机械手爪结构示意图。
10.图3为一种基于六轴机器人的多功能装配机械手爪正视示意图。
11.图中:1六轴机器人底座、2六轴机器人、3多功能装配机械手爪、4六轴机器人末端、5机械手爪(5a夹取手爪、5b吸盘手爪、5c电磁吸盘手爪)、6机械手爪中间轴、7连接杆、8气缸末端、9夹取手爪连接轴、10带导杆薄型气缸、11顶板、12气缸末端轴承、13真空发生器、14电磁吸盘、15吸盘。
具体实施方式
12.如图1所示一种基于六轴机器人的多功能装配机械手爪的整体结构示意图。
13.本实用新型为一种基于六轴机器人的多功能装配机械手爪,其主体多功能装配机械手爪(3)由顶板(11)通过螺钉连接安装固定于六轴机器人末端(4),通过六轴机器人(2)转动可实现不同功能的切换。
14.如图2所示一种机器人气动机械手爪的结构示意图。
15.所述气动机械手爪整体结构主要包括机械手爪(5a夹取手爪、5b吸盘手爪、5c电磁吸盘手爪)、连接杆(7)、气缸末端(8)、带导杆薄型气缸(10)、顶板(11)与气缸末端轴承(12);其实施方式为带导杆薄型气缸(10)带动气缸末端(8)一起上下往复运动,气缸末端(8)推动由气缸末端轴承(12)、连接杆(7)和气缸末端轴承(12)组成的传动机构带动夹取手爪(5)开合运动从而实现其对表面不规则零件的装配与夹取的目的;吸盘手爪(5b)与电磁吸盘手爪(5c)分别安装在顶板(11)两侧,且与夹取手爪(5a)呈45
°
,吸盘手爪(5b)的吸盘连接真空发生器(13),使吸盘(15)内外产生压力差,针对于表面较为平整的零件;电磁吸盘手爪(5c)通过内部线圈通电产生的电磁力来实现对金属零件的装配;所述顶板(11)中央有数个通孔用以通过螺钉连接安装于六轴机器人(2)末端,在其两侧开有凹槽以及通孔用以安装机械手爪(5)。
16.如图3所示一种机器人气动机械手爪正视示意图。
17.所述带导杆薄型气缸(10)通过螺钉连接安装于顶板(11)的正中央,在其导杆顶部由螺钉连接固定有气缸末端(8);所述气缸末端(8)在其左右两侧开有凹槽与通孔用以连接安装气缸末端轴承(12),此气缸末端轴承(12)与上述机械手爪连接件(5c)所安装的气缸末端轴承(12)用连接杆(7)相连接,组成传动机构,以实现带导杆薄型气缸(10)上下往复运动对两侧夹取手爪(5)开合的控制。吸盘手爪(5b)与电磁吸盘手爪(5c)分别安装在顶板(11)两侧,且与夹取手爪(5a)呈45
°
,吸盘手爪(5b)上末端固定吸盘(15)与真空发生器(13),电磁吸盘手爪(5c)末端固定电磁吸盘(14)。
18.装置整体由顶板(11)安装于六轴机器人末端(4),由带导杆薄型气缸(10)上下往复运动通过传动机构间接对两侧机械手爪(5)开合的控制、吸盘(15)内外产生压力差以及电磁吸盘手爪(5c)通过电磁吸盘(14)内部线圈通电产生的电磁力来实现对不同零件的装配和抓取。
技术特征:
1.一种基于六轴机器人的多功能装配机械手爪,包括六轴机器人(2)、夹取手爪(5a)、吸盘手爪(5b)、电磁吸盘手爪(5c)、连接杆(7)、气缸末端(8)、带导杆薄型气缸(10)及顶板(11),其特征在于所述顶板(11)有数个通孔用以通过螺钉连接安装于六轴机器人末端(4),其两侧开有通孔及凹槽以安装夹取手爪连接轴(9)用以连接夹取手爪(5a);所述夹取手爪(5a)通过夹取手爪连接轴(9)安装于顶板(11)正下方,并由带导杆薄型气缸(10)为动力带动两侧的夹取手爪(5a)开合运动从而实现其对表面不规则零件的装配与夹取的目的;吸盘手爪(5b)与电磁吸盘手爪(5c)分别安装在顶板(11)两侧,且与夹取手爪(5a)呈45
°
,吸盘手爪(5b)的吸盘(15)连接真空发生器(13),使吸盘(15)内外产生压力差,针对于表面较为平整的零件;电磁吸盘手爪(5c)通过电磁吸盘(14)内部线圈通电产生的电磁力来实现对金属零件的装配;根据六轴机器人(2)的转动来实现三个手爪的切换工作。2.根据权利要求1所述的一种基于六轴机器人的多功能装配机械手爪,其特征在于整个机械手爪由三个不同功能的手爪组成,分别为夹取手爪(5a)、吸盘手爪(5b)、电磁吸盘手爪(5c);吸盘手爪(5b)、电磁吸盘手爪(5c)分别固定在夹取手爪(5a)的两侧;夹取手爪(5a)利用带导杆薄型气缸(10)带动其做上下往复运动,并通过连接杆(7)来实现夹取工作;吸盘手爪(5b)侧臂上的吸盘(15)与真空发生器(13)连接,通过对零件的吸附完成工作,电磁吸盘手爪(5c)通过内部线圈通电产生的电磁力完成工作。
技术总结
本实用新型公开了一种基于六轴机器人的多功能装配机械手爪,包括六轴机器人、夹取手爪、吸盘手爪、电磁吸盘手爪以及带导杆薄型气缸。所述机械手爪通过顶板上端与六轴机器人末端相连接,机械手爪的带导杆薄型气缸固定于顶板下端正中央;本实用新型分别通过带导杆薄型气缸带动两侧的机械手爪开合运动、吸盘内外产生的压力差、电磁吸盘内部线圈通电产生的电磁力达到了其对金属或非金属零件的装配与抓取的目的。的目的。的目的。
技术研发人员:包佳伟 黄玉林 范振 陈乃建 张来伟 董春超 李亚辉
受保护的技术使用者:济南大学
技术研发日:2021.03.29
技术公布日:2021/10/23
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1