一种核环境用机器人关节的制作方法
1.本实用新型涉及核设施领域,尤其是核设施机械设备领域,具体为一种核环境用机器人关节。
背景技术:
2.随着核工业科学与技术的发展,核能发电、军用核动力装置、辐照产业得到了大力的推广和应用。与此同时,对于核设施的检查、维修需求也日益剧增。在核工业发展早期,由于检修、保养和事故过程中人员操作不当,或核环境中核物质放射性剂量过高,导致人员伤亡事故时有发生。为此,人们对应用于核环境的机械设备进行了大量研究,并取得了可观的进展。例如,中国专利申请cn105666478a公开了一种核辐射环境下的关节式机械臂快速拆装系统,中国专利申请cn110962117a公开了一种核电厂多关节水下异物夹取装置。应用于核环境的相关机械设备对于减少或避免操作人员的辐照伤害,保护操作人员的身体健康,取得了较好的效果,操作的安全性与可靠性也大大得到了提高。
3.由于核辐射环境内的设备繁多,各种管道错综复杂,通道狭隘,工作空间小,对机械设备的灵活性提出了更高的要求。关节部件作为机械设备的重要组成,对于机械设备的运行,具有重要作用。目前,市面上现有机器人的关节单元大多采用伺服电机、步进电机或无刷电机进行驱动控制。伺服电机、步进电机或无刷电机内通常设置有编码器、霍尔传感器等半导体元件,而半导体元件在核辐射环境下会失效,导致关节单元无法正常工作。针对这一问题,通常采用增加屏蔽结构的方式予以解决,但这会导致关节单元的结构复杂程度、生产成本增加,在一定程度上会影响关节的灵活性和可靠性。
4.为此,本技术提供一种新的结构,以解决上述问题。
技术实现要素:
5.本实用新型的发明目的在于:针对现有机器人的关节单元大多采用伺服电机、步进电机或无刷电机进行驱动控制,其内通常设置有编码器、霍尔传感器等半导体元件,而半导体元件在核辐射环境下会失效,导致关节单元无法正常工作的问题,提供一种核环境用机器人关节。针对核环境下的设备防护要求,本技术以有刷电机作为驱动装置,通过对连接结构的改进,在不额外增加屏蔽防护结构的前提下,实现机器人关节在核环境下的可靠、稳定运行。本技术的关节构思巧妙,设计合理,活动灵活,能够满足核环境下的应用需求,对于核领域的机械设备发展,具有重要的意义。
6.为了实现上述目的,本实用新型采用如下技术方案:
7.一种核环境用机器人关节,包括第一机械臂、有刷电机、控制系统、蜗杆、蜗轮、谐波减速器、第二机械臂,所述谐波减速器包括波发生器、柔轮、刚轮,所述波发生器、柔轮、刚轮由内至外依次相连为一体;
8.所述第一机械臂内设置有第一空腔,所述有刷电机设置在第一空腔内且有刷电机与第一机械臂固定连接,所述有刷电机与控制系统相连;
9.所述有刷电机的输出轴与蜗杆相连且有刷电机的输出轴能带动蜗杆转动,所述蜗轮与蜗杆相啮合且蜗杆能带动蜗轮转动,所述蜗杆的中心轴线与蜗轮的中心轴线相垂直,所述蜗轮与波发生器固定连接且蜗轮能带动波发生器同步转动;
10.所述第一机械臂与柔轮相连,所述第二机械臂与刚轮相连;或所述第一机械臂与刚轮相连,所述第二机械臂与柔轮相连。
11.所述蜗杆的中心轴线与第一机械臂的中心轴线相平行。
12.所述第一机械臂包括第一连接管、第一连接壳体,所述第一连接管内设置有第一空腔,所述有刷电机设置在第一空腔内且有刷电机与第一机械臂固定连接;
13.所述第一连接壳体内设置有第二空腔,所述谐波减速器设置在第二空腔内,所述第一连接壳体与第一连接管固定连接。
14.还包括电机支座,所述电机支座设置在第一连接管内,所述有刷电机通过电机支座与第一连接管相连。
15.所述第一连接管为中空管体。
16.所述第一连接管沿垂直于其轴向的剖面呈圆形或多边形。
17.所述第一连接管沿垂直于其轴向的剖面呈n边形,n为自然数且n≥3。
18.所述谐波减速器内设置有用于布线的第三空腔。
19.所述波发生器包括与柔轮相配合的发生连接一部、与蜗轮相配合的发生连接二部,所述蜗轮套设在发生连接二部外周上且蜗轮能带动波发生器同步运动,所述发生连接一部与发生连接二部采用一体成型。
20.还包括角度测量装置,所述角度测量装置为电位器或旋转变压器,所述角度测量装置设置在第二机械臂上且角度测量装置测量第二机械臂与第一机械臂的相对角度,所述角度测量装置与控制系统电连接且角度测量装置能将测定结果传递给控制系统。
21.所述电位器的旋转中心轴或旋转变压器的旋转中心轴与第一机械臂相连。当第一机械臂与第二机械臂相对转动时,第一机械臂能带动电位器的旋转中心轴相对电位器壳体转动,或第一机械臂能带动旋转变压器的旋转中心轴相对旋转变压器壳体转动。
22.本技术的核环境用机器人关节,以有刷电机作为动力源,通过蜗杆、蜗轮、波发生器、刚轮、柔轮、第一机械臂、第二机械臂之间的相互配合,实现关节的灵活运动;同时,通过谐波减速器内刚轮与柔轮之间的交叉滚子轴承为限位件,保证关节稳定、可靠的运动;而电位器或旋转变压器与第一机械臂、第二机械臂相互配合,实现对第一机械臂与第二机械臂相对转动角度的实时反馈,并传递给控制系统,进而实现关节的精准控制。
23.本技术的有益效果为:
24.(1)本技术的关节内不含半导体元件,对辐射不敏感,能够满足核环境下的应用需求,具有运行稳定、可靠等优点,能够满足工业化应用的需求;
25.(2)本技术以有刷电机作为动力源,通过蜗轮蜗杆结构、谐波减速器作为动力传递部件,实现第一机械臂、第二机械臂的相对转动;同时,通过电位器或旋转变压器进行转交实时反馈,进而实现关节的精准控制,使得关节具有极高的运行精度;
26.(3)相较于现有技术,本技术设计合理,有利于在实际中的应用和推广,满足实际应用的需求;
27.(4)本技术构思巧妙,设计合理,具有结构简单、稳定可靠、使用寿命长的优点;
28.(5)本技术的核环境用机器人关节能够应用于核环境下的机械设备中,对于提升相应设备的运行可靠性和稳定性,具有重要的意义。
附图说明
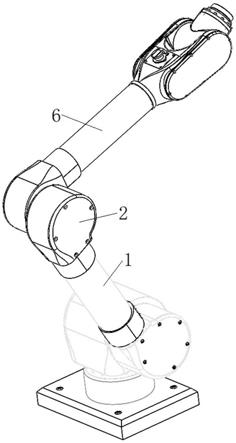
29.图1为核环境用机器人关节的整体结构示意图。
30.图2为图1中核环境用机器人关节的原理示意图一(去除第一连接壳体的展示图)。
31.图3为图1中核环境用机器人关节的原理示意图二(去除第二机械臂、第一连接壳体的展示图)。
32.图中标记:1、第一连接管,2、第一连接壳体,3、有刷电机,4、蜗杆,5、蜗轮,6、第二机械臂,7、波发生器,8、柔轮,9、刚轮。
具体实施方式
33.下面结合附图,对本实用新型作详细的说明。
34.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
35.实施例1
36.如图所示,本实施例提供一种核环境用机器人关节,其包括第一机械臂、有刷电机、控制系统、蜗杆、蜗轮、谐波减速器、第二机械臂、角度测量装置,有刷电机与控制系统相连。谐波减速器包括波发生器、柔轮、刚轮,波发生器、柔轮、刚轮由内至外依次相连为一体;刚轮与柔轮之间通过交叉滚子轴承相连,能够避免刚轮、柔轮相互脱落情况的发生。
37.如图所示,第一机械臂包括第一连接管、第一连接壳体,第一连接管内设置有第一空腔,第一连接壳体内设置有第二空腔。本实施例中,第一连接管为中空管体,第一连接管沿垂直于其轴向的剖面呈圆形。该核环境用机器人关节还包括电机支座,有刷电机与电机支座相连,电机支座与第一连接管内壁相连。同时,谐波减速器设置在第二空腔内,第一连接壳体与第一连接管固定连接为一体。
38.有刷电机的输出轴与蜗杆相连,蜗轮与蜗杆相啮合,蜗杆的中心轴线与蜗轮的中心轴线相垂直,蜗轮与波发生器固定连接。本实施例中,蜗杆的中心轴线与第一连接管的中心轴线相平行。该结构中,有刷电机的输出轴能带动蜗杆转动;由于蜗轮与蜗杆相啮合,且蜗杆的中心轴线与蜗轮的中心轴线相垂直,使得有刷电机的旋转运动转化为蜗轮的旋转运动;而蜗轮与波发生器固定连接,使得蜗轮能带动波发生器同步转动。
39.本实施例中,第一机械臂与刚轮相连,第二机械臂与柔轮相连。该结构中,有刷电机通过蜗杆、蜗轮的配合,能带动波发生器转动;波发生器转动时,能带动柔轮相对刚轮转动,进而实现动力输出;而第一机械臂与刚轮相连,第二机械臂与柔轮相连,进而实现第一机械臂相对第二机械臂的转动。作为一种替换方式,第一机械臂与柔轮相连,第二机械臂与刚轮相连。
40.本实施例中,角度测量装置选用电位器,电位器设置在第二机械臂上,电位器的旋转中心轴与第一机械臂相连,电位器与控制系统电连接。采用该结构,当第一机械臂与第二机械臂相对转动时,第一机械臂能带动电位器的旋转中心轴相对电位器壳体转动,进而实
现对旋转角度的测量,并将测定值传递给控制系统。换言之,通过电位器与其他部件的配合,能测量第二机械臂与第一机械臂的相对角度,并将测定结果传递给控制系统。作为一种替换方式,本实施例的电位器可采用旋转变压器,旋转变压器的旋转中心轴与第一机械臂相连。采用该结构,当第一机械臂与第二机械臂相对转动时,第一机械臂能带动旋转变压器的旋转中心轴相对旋转变压器壳体转动,进而实现第一机械臂与第二机械臂之间相对转交的测定。
41.本实施例中,波发生器包括与柔轮相配合的发生连接一部、与蜗轮相配合的发生连接二部,蜗轮套设在发生连接二部外周上且蜗轮能带动波发生器同步运动,发生连接一部与发生连接二部采用一体成型。
42.进一步,谐波减速器内设置有用于布线的第三空腔。采用该结构,第一机械臂内部、谐波减速器内部、第二机械臂内部依次连通,形成相应的布线通道,从而解决核环境用机器人关节外部布线的问题。
43.本技术中,蜗轮、蜗杆、波发生器之间存在自锁关系;当有刷电机断电后,第一机械臂与第二机械臂能保持相对静止,避免第一机械臂、第二机械臂相对滑动的发生。同时,本技术无需额外的锁定结构,有利于简化核环境用机器人关节的结构,减少设备的部件组成。
44.同时,本技术中采用的第一机械臂、有刷电机、控制系统、蜗杆、蜗轮、谐波减速器、第二机械臂、电位器、旋转变压器内不含半导体,使得核环境用机器人关节对辐射不敏感,进而使得本技术能够用于核环境中。同时,电位器、旋转变压器能对关节的旋转角度进行检测,并反馈给控制系统,进而实现核环境用机器人关节的精确控制。
45.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1