一种智能环境感知机器人
1.本实用新型涉及智能环境感知技术领域,具体为一种智能环境感知机器人。
背景技术:
2.机器人是自动执行工作的机器装置,机器人可接受人类指挥,也可以执行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动,机器人执行的是取代或是协助人类工作的工作,例如制造业、建筑业,或是其他危险的工作,机器人是高级整合控制论、机械电子、计算机、材料和仿生学的产物,在工业、医学和军事等领域中均有重要用途。机器人在执行任务时的环境一般比较恶劣或者多变,如何提高机器人对环境及时有效的感知成为机器人执行任务是否成功的重要因素之一,目前,现有技术往往通过单一的摄像传感器探头进行相关图像采集和分析,然后提供给机器人的环境感知数据,但是这种方式的准确性很差,远远落后机器人在执行任务中需要的应变感知,测量精度不高、对光照环境变化敏感,且在恶劣天气下无法工作,如何进行对于自身周围的环境进行有效感知是业界难以进行有效处理的问题之一,为此我们提出了一种智能环境感知机器人。
技术实现要素:
3.本实用新型的目的在于提供一种智能环境感知机器人,解决了背景技术中所提出的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种智能环境感知机器人,包括:控制主体,底部固定连接于转盘上端,控制主体外壁上端固定嵌入有显示器,控制主体外壁下端固定镶嵌有plc控制装置;球形监测器,左侧外壁活动套接有半球型透明护罩,球形监测器右侧内壁上端位置固定连接有视觉传感器,球形监测器右侧内壁下端位置固定连接有超声波发射器;底座,上端中间位置固定链接有轴承,底座右侧外壁左上方固定焊接有线盒,底座外壁四周均镶嵌有激光雷达传感器,底座底部四角位置均螺纹拧合有万向轮。
5.作为本实用新型的一种优选实施方式,所述球形监测器右侧外壁中间位置固定连接有弧形透明玻璃。
6.作为本实用新型的一种优选实施方式所述半球型透明护罩下端与控制主体上端固定连接。
7.作为本实用新型的一种优选实施方式,所述转盘下端与轴承上端活动连接。
8.作为本实用新型的一种优选实施方式,所述显示器与plc控制装置电性连接。
9.作为本实用新型的一种优选实施方式,所述半球型透明护罩圈口内固定粘接有清洗海绵。
10.作为本实用新型的一种优选实施方式,所述控制主体上端内壁固定连接有伺服电机,伺服电机输出端穿过半球型通明护罩和控制主体连接处与球形监测器下端固定连接。
11.与现有技术相比,本实用新型的有益效果如下:
12.1.本实用新型一种智能环境感知机器人,本实例的智能环境感知机器人在具体工
作过程中,基于激光雷达传感器获取周边环境两维或三维距离信息,通过距离分析识別对行驶环境进行感知,机器人能够直接获取物体三维距离信息,提高了测量精度和感知能力。
13.2.本实用新型一种智能环境感知机器人,本实例的智能环境感知机器人在具体工作过程中,通过超声波发射器向某一方向发射超声波,然后通过计算源声波发送时刻和回波信号接收时刻的时间间隔来获取障碍物的距离信息,当检测到有回波信号时输出回响信号,回响信号脉冲宽度与所测距离成线性相关,将采集到数据经控制中心模拟出实时环境,避免易受光照环境影响、三维信息测量精度较低的缺点。
14.3.本实用新型一种智能环境感知机器人,本实例的智能环境感知机器人在具体工作过程中,基于机器人视觉传感器获取周围环境两维或三维图像信息,当视觉传感器表面有异物或者遇到雨水天气时,可通过转动球形监测器与清洗海绵进行接触后转动到半球透明护照内继续工作,使其既达到清理异物的效果,又能继续稳定的工作,增加其工作时长和使用寿命。
附图说明
15.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
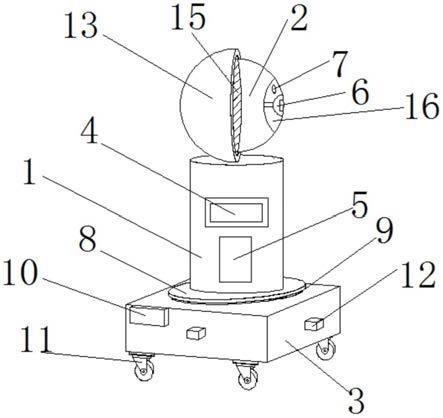
16.图1为本实用新型一种智能环境感知机器人的主视图;
17.图2为本实用新型一种智能环境感知机器人的球形监测器与控制主体的连接结构剖视示意图;
18.图中:1、控制主体;2、球形监测器;3、底座;4、显示器;5、plc控制装置;6、超声波发射器;7、视觉传感器;8、转盘;9、轴承;10、线盒;11、万向轮;12、激光雷达传感器;13、半球型透明护罩;14、伺服电机;15、清洗海绵;16、弧形透明玻璃。
具体实施方式
19.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
20.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
21.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“设置”应做广义理解,例如,可以是固定相连、设置,也可以是可拆卸连接、设置,或一体地连接、设置;本实用新型中提供的用电器的型号仅供参考。对于本领域的普通技术人员而言,可以根据实际使用情况更换功能相同的不同型号用电器,对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
22.请参阅图1
‑
2,本实用新型提供一种技术方案:一种智能环境感知机器人,包括:控制主体1,底部固定连接于转盘8上端,控制主体1外壁上端固定嵌入有显示器4,控制主体1外壁下端固定镶嵌有plc控制装置5;球形监测器2,左侧外壁活动套接有半球型透明护罩13,球形监测器2右侧内壁上端位置固定连接有视觉传感器7,球形监测器2右侧内壁下端位
置固定连接有超声波发射器6;底座3,上端中间位置固定链接有轴承9,底座3右侧外壁左上方固定焊接有线盒10,底座3外壁四周均镶嵌有激光雷达传感器12,底座3底部四角位置均螺纹拧合有万向轮11。
23.本实施例中(如图1所示),所述球形监测器2右侧外壁中间位置固定连接有弧形透明玻璃16,能阻挡外界杂物对传感器的影响,保证其环境感知的准确性。
24.本实施例中(请参阅图1),所述半球型透明护罩13下端与控制主体1上端固定连接。
25.本实施例中(如图1所示),所述转盘8下端与轴承9上端活动连接,使激光雷达传感器12对周围环境能进行旋转监测。
26.本实施例中(请参阅图1),所述显示器4与plc控制装置5电性连接能有效的观测机器人对环境感知的反馈并实时进行控制。
27.本实施例中(请参阅图1)所述半球型透明护罩13圈口内固定粘接有清洗海绵15,应对恶劣天气时可以对传感器上的异物和灰尘进行清理。
28.本实施例中(请参阅图2),所述控制主体1上端内壁固定连接有伺服电机14,伺服电机14输出端穿过半球型通明护罩13和与控制主体1连接处与球形监测器2下端固定连接,可使球形监测器2面对不同环境进行旋转监测。
29.需要说明的是,本实用新型为一种智能环境感知机器人,各个件均为通用标准件或本领域技术人员知晓的部件,其结构和原理都为本技术人员均可通过技术手册得知或通过常规实验方法获知。
30.工作原理:本实例的智能环境感知机器人在具体工作过程中,基于激光雷达传感器12获取周边环境两维或三维距离信息,通过距离分析识別对行驶环境进行感知,机器人能够直接获取物体三维距离信息,提高了测量精度和感知能力;本实例的智能环境感知机器人在具体工作过程中,通过超声波发射器6向某一方向发射超声波,然后通过计算源声波发送时刻和回波信号接收时刻的时间间隔来获取障碍物的距离信息,当检测到有回波信号时输出回响信号,回响信号脉冲宽度与所测距离成线性相关,将采集到数据经控制中心模拟出实时环境,避免易受光照环境影响、三维信息测量精度较低的缺点;本实例的智能环境感知机器人在具体工作过程中,基于机器人视觉传感器7获取周围环境两维或三维图像信息,当视觉传感器7表面有异物或者遇到雨水天气时,可通过转动球形监测器2与清洗海绵15进行接触后转动到半球透明护照内继续工作,使其既达到清理异物的效果,又能继续稳定的工作,增加其工作时长和使用寿命。
31.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点,对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
32.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当
将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1