一种安装于封闭煤场的机器人轨道的制作方法
1.本实用新型涉及一种安装于封闭煤场的机器人轨道,涉及轨道技术领域。
背景技术:
2.封闭煤场的煤棚一般设置为顶部为半圆形状的隧道,在煤棚内一般有2个煤垛,煤垛的正中心上方安装轨道智能机器人,煤棚顶部安装轨道,机器人在轨道上行走,以确定机器人的检测面能够覆盖两个煤垛及斗轮机,如果只安装一个轨道和机器人,需要煤棚的高度足够高,同时对轨道的竖直性要求较高,安装工作量较大。
技术实现要素:
3.本实用新型针对现有技术存在的不足,提供一种安装于封闭煤场的机器人轨道,用以解决现有技术中的轨道安装对煤棚高度要求高、安装工作量大的技术问题。
4.本实用新型解决上述技术问题的技术方案如下:一种安装于封闭煤场的机器人轨道,包括安装在煤棚顶部一侧的两个斜梁和安装在斜梁上始终保持竖直状态的两个轨道本体,两个轨道本体的两端分别安装在两个斜梁上。
5.在上述技术方案的基础上,本实用新型还可以做如下改进。
6.进一步,两个轨道本体均可拆卸安装在横梁上,所述横梁的两端分别通过纵梁a和纵梁b安装在斜梁上,所述纵梁a和纵梁b与横梁的夹角均为直角,所述纵梁a和纵梁b的另一端均与斜梁为转动安装。
7.进一步,所述纵梁a上滑动安装辅助梁a,所述辅助梁a的另一端可拆卸转动安装在斜梁上,且辅助梁a与斜梁和纵梁a组成一个锐角三角形。
8.进一步,所述纵梁b上滑动安装辅助梁b,所述辅助梁b的另一端可拆卸转动安装在斜梁上,且辅助梁b与斜梁和纵梁b组成一个锐角三角形。
9.进一步,所述轨道本体通过连接架安装在横梁上,所述连接架设置为工字钢,该连接架的顶部和紧固板分别安装在横梁的两侧通过螺钉进行连接。
10.进一步,所述纵梁a包括两条,两条纵梁a的底部均通过螺钉垂直安装在连接架的水平面上,两条纵梁a的顶部分别转动安装在转轴的两侧,该转轴转动安装在压板的轴套上,该压板与另一压板分别设置在斜梁的上下两侧通过螺钉锁紧。
11.进一步,所述纵梁b包括两条,两条纵梁b的底部均通过螺钉垂直安装在连接架的水平面上,两条纵梁b的顶部分别转动安装在转轴的两侧,该转轴转动安装在压板的轴套上,该压板与另一压板分别设置在斜梁的上下两侧通过螺钉锁紧。
12.进一步,所述辅助梁a包括两条,其靠近纵梁a的一端和滑板分别设置在纵梁a的两侧并通过螺钉进行连接,两条辅助梁a的另一端均转动安装在中心轴上,该中心轴和调节板分别设置在斜梁的上下两侧并通过异型螺钉连接,该异型螺钉一端螺纹安装在调节板上,另一端设置圆环转动安装在中心轴上。
13.进一步,所述辅助梁b包括两条,其靠近纵梁b的一端和滑板分别设置在纵梁b的两
侧并通过螺钉进行连接,两条辅助梁b的另一端均转动安装在中心轴上,该中心轴和调节板分别设置在斜梁的上下两侧并通过异型螺钉连接,该异型螺钉一端螺纹安装在调节板上,另一端设置圆环转动安装在中心轴上。
14.本实用新型的有益效果是:通过将轨道本体保持竖直状态安装在斜梁上,适应于安装在不同斜度的斜梁上,从而保证机器人轨道的竖直状态,进而保证机器人的运动轨迹,降低了安装工作量;通过将纵梁a和纵梁b与斜梁采用转动安装,同时纵梁a和纵梁b与横梁夹角均为直角,保证了横梁的水平,进而保证了轨道的竖直状态;通过设置辅助梁a和辅助梁b,防止轨道发生晃动影响数据采集,提高机器人在轨道上运行时的稳定性。
附图说明
15.图1为本实用新型的主视图;
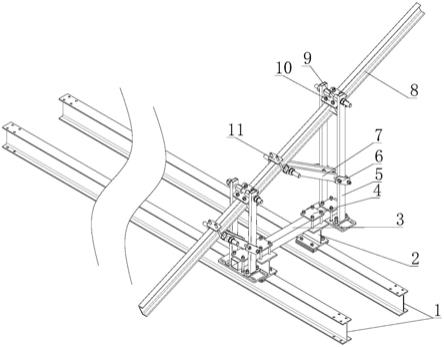
16.图2为本实用新型的右侧轴向立体图;
17.图3为本实用新型的左侧轴向立体图。
18.图中1.轨道本体,2.连接架,3.横梁,4.紧固板,5.纵梁a,6.滑板,7.辅助梁a,8.斜梁,9.转轴,10.压板,11.调节板,12.纵梁b,13.辅助梁b,14.中心轴。
具体实施方式
19.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
20.参见附图1
‑
3,一种安装于封闭煤场的机器人轨道,包括安装在煤棚顶部一侧的两个斜梁8和安装在斜梁8上始终保持竖直状态的两个轨道本体1,两个轨道本体1的两端分别安装在两个斜梁8上,比如,安装在煤棚顶部一侧的两个斜梁8的间隔距离为4米,两个轨道本体1的两端分别安装在两个斜梁8上,通过将轨道本体1保持竖直状态安装在斜梁8上,适应于安装在不同斜度的斜梁8上,从而保证机器人轨道的竖直状态,进而保证机器人的运动轨迹,降低了安装工作量。
21.两个轨道本体1均可拆卸安装在横梁3上,所述轨道本体1通过连接架2安装在横梁3上,所述连接架2设置为工字钢,该连接架2的顶部和紧固板4分别安装在横梁3的两侧通过螺钉进行连接,具体地,连接架2的顶部和紧固板4分别压紧在横梁3的底面和顶面,然后通过四个螺钉同时穿过连接架2和紧固板4后安装螺母锁紧。所述横梁3的两端分别通过纵梁a5和纵梁b12安装在斜梁8上,所述纵梁a5和纵梁b12与横梁3的夹角均为直角,所述纵梁a5和纵梁b12的另一端均与斜梁8为转动安装,具体地,所述纵梁a5包括两条,两条纵梁a5的底部均通过螺钉垂直安装在连接架2的水平面上,两条纵梁a5的顶部分别转动安装在转轴9的两侧,该转轴9转动安装在压板10的轴套上,该轴套固定安装在压板上,该压板10与另一压板10分别设置在斜梁8的上下两侧通过螺钉锁紧,具体地,四个螺钉同时穿过斜梁8两侧的压板10然后通过螺母锁紧。所述纵梁b12包括两条,两条纵梁b12的底部均通过螺钉垂直安装在连接架2的水平面上,两条纵梁b12的顶部分别转动安装在转轴9的两侧,该转轴9转动安装在压板10的轴套上,该压板10与另一压板10分别设置在斜梁8的上下两侧通过螺钉锁紧,通过将纵梁a5和纵梁b12与斜梁8采用转动安装,同时纵梁a5和纵梁b12与横梁3夹角均为直角,保证了横梁3的水平,进而保证了轨道本体1的竖直状态。
22.所述纵梁a5上滑动安装辅助梁a7,所述辅助梁a7的另一端可拆卸转动安装在斜梁8上,且辅助梁a7与斜梁8和纵梁a5组成一个锐角三角形,所述纵梁b12上滑动安装辅助梁b13,所述辅助梁b13的另一端可拆卸转动安装在斜梁8上,且辅助梁b12与斜梁8和纵梁b12组成一个锐角三角形。具体地,所述辅助梁a7包括两条,其靠近纵梁a5的一端和滑板6分别设置在纵梁a5的两侧并通过螺钉进行连接,两条辅助梁a5的另一端均转动安装在中心轴14上,该中心轴14和调节板11分别设置在斜梁8的上下两侧并通过两个异型螺钉连接,该异型螺钉一端螺纹安装在调节板11上,另一端设置圆环转动安装在中心轴14上,两个异型螺钉分别安装在斜梁8两侧。所述辅助梁b12包括两条,其靠近纵梁b12的一端和滑板6分别设置在纵梁b12的两侧并通过螺钉进行连接,两条辅助梁b12的另一端均转动安装在中心轴4上,该中心轴14和调节板11分别设置在斜梁8的上下两侧并通过异型螺钉连接,该异型螺钉一端螺纹安装在调节板11上,另一端设置圆环转动安装在中心轴14上,通过设置辅助梁a7和辅助梁b13,防止轨道发生晃动影响数据采集,提高机器人在轨道上运行时的稳定性。
23.使用该机器人轨道安装于煤棚时,首先将轨道本体1通过连接架2安装在横梁3上,然后将纵梁a5和纵梁b12的底部分别安装在连接架2上,将纵梁a5和纵梁b12的顶部分别安装在斜梁8上,再将辅助梁a7和辅助梁b13的底端分别安装在纵梁a5和纵梁b12上,将辅助梁a7和辅助梁b13的顶部分别安装在斜梁8上,最后将斜梁安装在煤棚顶部即完成安装。
24.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1