一种矿井用危险气体探测机器人
1.本实用新型涉矿井探测领域,特别涉及一种矿井用危险气体探测机器人。
背景技术:
2.矿井是形成地下煤矿生产系统的井巷、硐室、装备、地面建筑物和构筑物的总称,有时把矿山地下开拓中的斜井、竖井、平硐等也称为矿井,每一个矿井的井田范围大小、矿井生产能力和服务年限的确定,是矿井自体设计中必须解决好的关键问题之一,煤矿事故发生后,矿井中存在着如盲巷、采空区以及其他通风不畅的场所,存在大量可燃易爆和有毒气体,同时发生火灾或爆炸等事故的现场又产生了许多新的安全隐患,增加了救援工作的难度以及发生二次事故的可能性。
3.在现有技术中,通常会使用探测机器人进行危险气体的探测,而探测时需要对不同高度的气体进行采样探测,但是在高度过高时容易导致探测机器人侧翻倾倒,影响探测机器人的后续移动,而且现有技术中的探测机器人在探测气体时,探测范围小,导致探测不全面。
技术实现要素:
4.针对背景技术中提到的问题,本实用新型的目的是提供一种矿井用危险气体探测机器人,以解决背景技术中提到的问题。
5.本实用新型的上述技术目的是通过以下技术方案得以实现的:
6.一种矿井用危险气体探测机器人,包括机器人本体,所述机器人本体的侧壁固定安装有支撑组件,所述机器人本体的上端固定安装有动力组件,所述动力组件与支撑组件传动连接,所述机器人本体的上端固定安装有抬升组件,所述机器人本体的上端通过抬升组件活动连接有转动组件,所述机器人本体的上端通过转动组件固定安装有电动推杆,所述电动推杆的输出端固定安装有气体探测头。
7.通过采用上述技术方案,在探测矿井内部的危险气体时,通过电动推杆带动气体探测头移动,达到增加气体探测头的探测距离的作用,并通过转动组件带动电动推杆转动,使气体探测头的探测范围更广,使探测更加全面,在需要调整探测高度时,通过抬升组件带动转动组件向上移动,达到调节气体探测头高度的作用,气体探测头的高度调整完成后,通过动力组件带动支撑组件,使支撑组件达到支撑机器人本体的作用,避免气体探测头的位置过高导致机器人本体侧翻倾倒,影响后续的探测工作。
8.较佳的,所述支撑组件包括固定盒、第一螺纹杆与支撑板,所述固定盒固定安装在机器人本体的侧壁,所述第一螺纹杆转动连接在固定盒的内部,所述第一螺纹杆与动力组件传动连接,所述第一螺纹杆的下端贯穿固定盒,所述支撑板固定安装在第一固定杆的下端。
9.通过采用上述技术方案,第一螺纹杆通过与动力组件传动连接,使第一螺纹杆通过动力组件带动在固定盒的内部进行纵向移动,通过第一螺纹杆的纵向移动带动支撑板向
下移动,达到支撑机器人本体的作用。
10.较佳的,所述固定盒的侧壁开设有滑槽,所述第一螺纹杆的上端固定安装有滑竿,所述滑竿滑动连接在滑槽的内部。
11.通过采用上述技术方案,通过滑竿滑动连接在滑槽的内部,使滑竿稳固第一螺纹杆的位置,避免第一螺纹杆跟随传动组件转动,导致第一螺纹杆无法纵向移动。
12.较佳的,所述动力组件包括第一电机、第一齿轮、传动带与第二齿轮,所述第一电机固定安装在机器人本体的内部,所述第一电机的输出端贯穿机器人本体,所述第一齿轮固定安装在第一电机的输出端,所述传动带啮合连接在第一齿轮的外壁,所述第二齿轮转动连接在固定盒的内部,所述第二齿轮的内壁与第一螺纹杆的外壁螺纹连接,所述传动带的一端伸入固定盒的内部,所述传动带的一端与第二齿轮啮合连接。
13.通过采用上述技术方案,通过动力组件带动第一螺纹杆纵向移动,达到支撑机器人本体的作用,第一电机通过第一齿轮带动传动带移动,通过传动带的移动带动第二齿轮转动,达到使第一螺纹杆纵向移动的作用。
14.较佳的,所述抬升组件包括固定箱、套管、第二电机、连接柱、螺纹槽与第二螺纹杆,所述固定箱固定安装在机器人本体的上端,所述套管固定连接在固定箱的上端,所述第二电机固定安装在固定箱的内部,所述连接柱滑动连接在套管的内部,所述连接柱的上端贯穿套管,所述螺纹槽开设连接柱的下端,所述第二螺纹杆螺纹连接在螺纹槽的内部,所述第二螺纹杆的下端贯穿螺纹槽,所述第二螺纹杆的下端贯穿套管,所述第二螺纹杆的下端与第二电机的输出端固定连接。
15.通过采用上述技术方案,通过抬升组件进行气体探测头的高度调节时,第二电机带动第二螺纹杆转动,使连接柱通过螺纹槽在套管的内部纵向移动,达到调节气体探测头高度的作用。
16.较佳的,所述套管的内壁开设有限位槽,所述连接柱外壁的下端固定安装有限位块,所述限位块滑动连接在限位槽的内部。
17.通过采用上述技术方案,在第二螺纹杆转动时,通过限位块滑动连接在限位槽的内部,达到稳固连接柱位置的作用,避免连接柱跟随第二螺纹杆转动,影响连接柱的纵向移动。
18.较佳的,所述转动组件包括连接箱、第三电机与转板,所述连接箱固定安装在连接柱的上端,所述第三电机固定安装在连接箱的内部,所述第三电机的输出端贯穿固定箱,所述转板固定安装在第三电机的输出端,所述电动推杆固定安装在转板的上端。
19.通过采用上述技术方案,通过转动组件带动气体探测头转动,达到提升气体探测头探测范围的作用,通过第三电机带动转板转动,使转板带动电动推杆转动,达到提升气体探测头探测范围的作用。
20.较佳的,所述固定箱的上端开设有定位槽,所述转板的下端固定安装有定位杆,所述定位杆的下端滑动连接在定位槽的内部。
21.通过采用上述技术方案,通过定位杆的下端滑动连接在定位槽的内部,达到稳固转板位置的作用,避免转板倾斜影响探测工作。
22.综上所述,本实用新型主要具有以下有益效果:
23.第一、在探测矿井内部的危险气体时,通过电动推杆带动气体探测头移动,达到增
加气体探测头的探测距离的作用,并通过转动组件带动电动推杆转动,使气体探测头的探测范围更广,使探测更加全面,在需要调整探测高度时,通过抬升组件带动转动组件向上移动,达到调节气体探测头高度的作用,气体探测头的高度调整完成后,通过动力组件带动支撑组件,使支撑组件达到支撑机器人本体的作用,避免气体探测头的位置过高导致机器人本体侧翻倾倒,影响后续的探测工作;
24.第二、在使用抬升组件抬高气体探测头的高度时,通过动力组件带动支撑组件,使支撑组件达到支撑机器人本体的作用,避免机器人本体侧翻倾倒,第一电机通过第一齿轮带动传动带移动,通过传动带的移动带动第二齿轮转动,达到使第一螺纹杆在固定盒内部纵向移动的作用,通过第一螺纹杆纵向移动带动支撑板,通过支撑板增加机器人本体的支撑面,达到支撑机器人本体位置的作用;
25.第三、通过转动组件带动气体探测头转动,达到提升气体探测头探测范围的作用,通过第三电机带动转板转动,使转板带动电动推杆转动,达到提升气体探测头探测范围的作用,通过定位杆的下端滑动连接在定位槽的内部,达到稳固转板位置的作用,避免转板倾斜影响探测工作。
附图说明
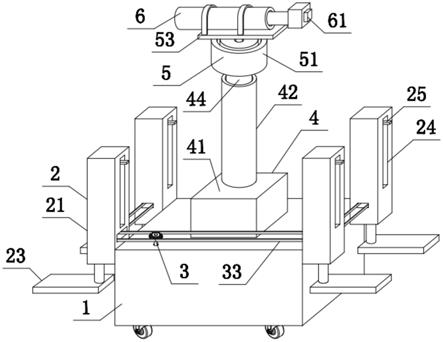
26.图1是本实用新型的结构示意图;
27.图2是本实用新型的剖视图;
28.图3是本实用新型的支撑组件结构示意图;
29.图4是本实用新型的抬升组件结构示意图;
30.图5是本实用新型的转动组件结构示意图。
31.附图标记:1、机器人本体;2、支撑组件;21、固定盒;22、第一螺纹杆;23、支撑板;24、滑槽;25、滑竿;3、动力组件;31、第一电机;32、第一齿轮;33、传动带;34、第二齿轮;4、抬升组件;41、固定箱;42、套管;43、第二电机;44、连接柱;45、螺纹槽;46、第二螺纹杆;47、限位槽;48、限位块;5、转动组件;51、连接箱;52、第三电机;53、转板;54、定位槽;55、定位杆;6、电动推杆;61、气体探测头。
具体实施方式
32.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
33.实施例
34.参考图1-5,一种矿井用危险气体探测机器人,包括机器人本体1,所述机器人本体1的侧壁固定安装有支撑组件2,所述机器人本体1的上端固定安装有动力组件3,所述动力组件3与支撑组件2传动连接,所述机器人本体1的上端固定安装有抬升组件4,所述机器人本体1的上端通过抬升组件4活动连接有转动组件5,所述机器人本体1的上端通过转动组件5固定安装有电动推杆6,所述电动推杆6的输出端固定安装有气体探测头61;在探测矿井内部的危险气体时,通过电动推杆6带动气体探测头61移动,达到增加气体探测头61的探测距
离的作用,并通过转动组件5带动电动推杆6转动,使气体探测头61的探测范围更广,使探测更加全面,在需要调整探测高度时,通过抬升组件4带动转动组件5向上移动,达到调节气体探测头61高度的作用,气体探测头61的高度调整完成后,通过动力组件3带动支撑组件2,使支撑组件2达到支撑机器人本体1的作用,避免气体探测头61的位置过高导致机器人本体1侧翻倾倒,影响后续的探测工作。
35.参考图2-3,为了达到支撑机器人本体1位置的目的;所述支撑组件2包括固定盒21、第一螺纹杆22与支撑板23,所述固定盒21固定安装在机器人本体1的侧壁,所述第一螺纹杆22转动连接在固定盒21的内部,所述第一螺纹杆22与动力组件3传动连接,所述第一螺纹杆22的下端贯穿固定盒21,所述支撑板23固定安装在第一固定杆的下端;所述固定盒21的侧壁开设有滑槽24,所述第一螺纹杆22的上端固定安装有滑竿25,所述滑竿25滑动连接在滑槽24的内部;所述动力组件3包括第一电机31、第一齿轮32、传动带33与第二齿轮34,所述第一电机31固定安装在机器人本体1的内部,所述第一电机31的输出端贯穿机器人本体1,所述第一齿轮32固定安装在第一电机31的输出端,所述传动带33啮合连接在第一齿轮32的外壁,所述第二齿轮34转动连接在固定盒21的内部,所述第二齿轮34的内壁与第一螺纹杆22的外壁螺纹连接,所述传动带33的一端伸入固定盒21的内部,所述传动带33的一端与第二齿轮34啮合连接;在使用抬升组件4抬高气体探测头61的高度时,通过动力组件3带动支撑组件2,使支撑组件2达到支撑机器人本体1的作用,避免机器人本体1侧翻倾倒,第一电机31通过第一齿轮32带动传动带33移动,通过传动带33的移动带动第二齿轮34转动,达到使第一螺纹杆22在固定盒21内部纵向移动的作用,通过第一螺纹杆22纵向移动带动支撑板23,通过支撑板23增加机器人本体1的支撑面,达到支撑机器人本体1位置的作用,在第二齿轮34带动第一螺纹杆22纵向移动时,通过滑竿25滑动连接在滑槽24的内部,使滑竿25稳固第一螺纹杆22的位置,避免第一螺纹杆22跟随第二齿轮34转动,导致第一螺纹杆22无法纵向移动。
36.参考图4,为了达到调节气体探测头61高度的目的;所述抬升组件4包括固定箱41、套管42、第二电机43、连接柱44、螺纹槽45与第二螺纹杆46,所述固定箱41固定安装在机器人本体1的上端,所述套管42固定连接在固定箱41的上端,所述第二电机43固定安装在固定箱41的内部,所述连接柱44滑动连接在套管42的内部,所述连接柱44的上端贯穿套管42,所述螺纹槽45开设连接柱44的下端,所述第二螺纹杆46螺纹连接在螺纹槽45的内部,所述第二螺纹杆46的下端贯穿螺纹槽45,所述第二螺纹杆46的下端贯穿套管42,所述第二螺纹杆46的下端与第二电机43的输出端固定连接;所述套管42的内壁开设有限位槽47,所述连接柱44外壁的下端固定安装有限位块48,所述限位块48滑动连接在限位槽47的内部;通过抬升组件4进行气体探测头61的高度调节时,第二电机43带动第二螺纹杆46转动,使连接柱44通过螺纹槽45在套管42的内部纵向移动,达到调节气体探测头61高度的作用,在第二螺纹杆46转动时,通过限位块48滑动连接在限位槽47的内部,达到稳固连接柱44位置的作用,避免连接柱44跟随第二螺纹杆46转动,影响连接柱44的纵向移动。
37.参考图5,为了达到增加气体探测头61探测范围的目的;所述转动组件5包括连接箱51、第三电机52与转板53,所述连接箱51固定安装在连接柱44的上端,所述第三电机52固定安装在连接箱51的内部,所述第三电机52的输出端贯穿固定箱41,所述转板53固定安装在第三电机52的输出端,所述电动推杆6固定安装在转板53的上端;所述固定箱41的上端开
设有定位槽54,所述转板53的下端固定安装有定位杆55,所述定位杆55的下端滑动连接在定位槽54的内部;通过转动组件5带动气体探测头61转动,达到提升气体探测头61探测范围的作用,通过第三电机52带动转板53转动,使转板53带动电动推杆6转动,达到提升气体探测头61探测范围的作用,通过定位杆55的下端滑动连接在定位槽54的内部,达到稳固转板53位置的作用,避免转板53倾斜影响探测工作。
38.使用原理及优点:在探测矿井内部的危险气体时,通过电动推杆6带动气体探测头61移动,达到增加气体探测头61的探测距离的作用,并通过转动组件5带动电动推杆6转动,使气体探测头61的探测范围更广,使探测更加全面,通过连接箱51内部固定安装的第三电机52带动转板53转动,使转板53带动电动推杆6转动,达到提升气体探测头61探测范围的作用,通过定位杆55的下端滑动连接在定位槽54的内部,达到稳固转板53位置的作用,避免转板53倾斜影响探测工作,在需要调整探测高度时,通过抬升组件4带动转动组件5向上移动,达到调节气体探测头61高度的作用,通过抬升组件4进行气体探测头61的高度调节时,固定箱41内部固定安装的第二电机43带动第二螺纹杆46转动,使连接柱44通过螺纹槽45在套管42的内部纵向移动,达到调节气体探测头61高度的作用,在第二螺纹杆46转动时,通过限位块48滑动连接在限位槽47的内部,达到稳固连接柱44位置的作用,避免连接柱44跟随第二螺纹杆46转动,影响连接柱44的纵向移动,气体探测头61的高度调整完成后,通过动力组件3带动支撑组件2,使支撑组件2达到支撑机器人本体1的作用,第一电机31通过第一齿轮32带动传动带33移动,通过传动带33的移动带动第二齿轮34转动,达到使第一螺纹杆22在固定盒21内部纵向移动的作用,通过第一螺纹杆22纵向移动带动支撑板23,通过支撑板23增加机器人本体1的支撑面,达到支撑机器人本体1位置的作用,避免气体探测头61的位置过高导致机器人本体1侧翻倾倒,影响后续的探测工作,在第二齿轮34带动第一螺纹杆22纵向移动时,通过滑竿25滑动连接在滑槽24的内部,使滑竿25稳固第一螺纹杆22的位置,避免第一螺纹杆22跟随第二齿轮34转动,导致第一螺纹杆22无法纵向移动。
39.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1