一种具有桁架式结构的机械臂和工业机器人
1.本实用新型涉及工业机器人领域,特别是一种具有桁架式结构的机械臂和工业机器人。
背景技术:
2.近年来,随着“工业4.0”及中国制造2025的提出,作为高端智能制造装备的工业机器人,广泛用于汽车、家电、机械、食品、航空等多个行业中。关节式工业机器人的机械臂承载了工业机器人各个关节上零部件的动静载荷、以及末端作业对象产生的负载,是工业机器人中非常重要的组成部件,也占据了整个工业机器人重量的一大部分。
3.目前的机械臂以压铸铝合金为主,其具有密度小、强度高等诸多优秀的性能,因而被广泛用于机械臂的制造当中。但是,这种结构采用整体压铸的实心结构,没有经过结构优化设计,造成机械臂力学性能过剩和不必要的材料浪费,同时,过重的机械臂也限制了工业机器人的负载自重比的提升。
技术实现要素:
4.本实用新型的主要目的在于克服现有的机械臂没有经过结构优化设计、机械臂力学性能过剩和不必要的材料浪费的缺陷,提出一种具有桁架式结构的机械臂和工业机器人。
5.本实用新型采用如下技术方案:
6.一种具有桁架式结构的机械臂,包括机械臂本体,其特征在于:该机械臂本体包括连接框架、两安装部、两侧连接杆组和一底连接杆组;该两侧连接杆组分别固定于连接框架的两相对侧面;该底连接杆组固定于连接框架底面;该两安装部分别固定于连接框架两端。
7.所述连接框架包括两上弦杆和两下弦杆,该两上弦杆互相平行且分别与对应的下弦杆平行;一所述安装部固定于两上弦杆和两下弦杆一端,另一所述安装部固定于两上弦杆和两下弦杆的另一端。
8.所述侧连接杆组包括若干侧腹杆,该若干侧腹杆为沿连接框架长度方向间隔设置。所述侧腹杆为直杆或x形杆。所述侧腹杆采用铸钢、低碳钢、铝合金或镁合金中的一种材质制成,所述侧腹杆的截面形状为矩形、圆形、椭圆形、圆角矩形、正多边形或者工字形。
9.所述底连接杆组包括若干底腹杆,该若干底腹杆为沿连接框架长度方向间隔设置。所述底腹杆为直杆或x形杆。所述底腹杆采用铸钢、低碳钢、铝合金或镁合金中的一种材质制成,所述底腹杆的截面形状为矩形、圆形、椭圆形、圆角矩形、正多边形或者工字形。
10.所述安装部相对所述连接框架一端设有连接端面,侧部设有安装槽;所述连接框架与连接端面之间,所述两侧连接杆组和底连接杆组与所述连接框架之间采用焊接固定。
11.一种工业机器人,包括机器人本体,其特征在于:该机器人本体设有上述的一种具有桁架式结构的机械臂。
12.由上述对本实用新型的描述可知,与现有技术相比,本实用新型具有如下有益效
果:
13.1、本实用新型中,将机械臂设计成镂空的桁架式结构,能在保证其强度的同时极大地降低机械臂的重量,大幅节约产品用料,降低产品生产成本;同时提高机械臂的负载自重比,提高工业机器人的负载性能及使用寿命。
14.2、本实用新型中,连接框架起到构建机械臂本体主体框架的作用并承担机械臂轴向方向也即长度方向的力。侧连接杆组连接固定上弦杆和下弦杆之间的相对距离,并承担了竖直方向的力;底连接杆组固定两根下弦杆之间的相对距离,并承担机械臂横向方向也即宽度方向的力和主要的安装部的轴向力矩,保证机械臂的力学性能。
15.3、本实用新型中,连接框架与侧连接杆组和底连接杆组之间,采用两两焊接,尽量避免三个杆件相互交叉的情况,从而有效避免出现应力集中的情况。
16.4、本实用新型中,侧腹杆和底腹杆可采用直杆、x形杆或者其它形状的杆件,材质可采用铸钢、低碳钢、铝合金或镁合金,截面形状为矩形、圆形、椭圆形、圆角矩形、正多边形或者工字形,形式多样,满足现实制造需求,能够广泛应用于汽车、家电、机械、食品等多个行业的工业机器人、自动生产线。
附图说明
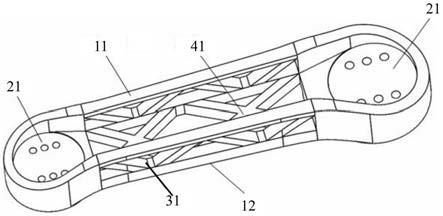
17.图1为本实用新型立体图;
18.图2为本实用新型侧视图;
19.图3为本实用新型俯视图;
20.图4为本实用新型组装图;
21.其中:
22.10、连接框架,11、上弦杆,12、下弦杆,20、安装部,21、连接端面,22、安装槽,30、侧连接杆组,31、侧腹杆,40、底连接杆组,41、底腹杆。
具体实施方式
23.以下通过具体实施方式对本实用新型作进一步的描述。
24.本实用新型中出现的“第一”、“第二”等用语仅是为了方便描述,以区分具有相同名称的不同组成部件,并不表示先后或主次关系。
25.在本实用新型的描述中,采用了“上”、“下”、“左”、“右”、“前”和“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型,而不是指示或暗示所指的装置必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型保护范围的限制。
26.实施例一
27.参见图1至图4,一种具有桁架式结构的机械臂,包括机械臂本体,其包括连接框架10、两安装部20、两侧连接杆组30和一底连接杆组40。该两侧连接杆组30分别固定于连接框架10的两相对侧面;该底连接杆组40固定于连接框架10底面;该两安装部20分别固定于连接框架10两端。
28.其中,侧连接杆组30设置于连接框架10的侧面上,且可包括若干侧腹杆31,该若干侧腹杆31为沿连接框架10对应侧的长度方向间隔设置,即侧腹杆31顶端与连接框架10对应
侧顶端相连,侧腹杆31底端与连接框架10对应侧底端相连。具体的,侧腹杆31可为直杆、x形杆或者其它形状的杆件,侧腹杆31可采用铸钢、低碳钢、铝合金或镁合金中的一种材质制成。侧腹杆31的截面形状为矩形、圆形、椭圆形、圆角矩形、正多边形或者工字形。
29.实际应用中,可采用直杆,截面为矩形,相邻的两侧腹杆31可互相平行或者也可倾斜设置,本实施例中,相邻两腹杆倾斜设置,且为轴对称。
30.底连接杆组40设置于连接框架10的底面上,其包括若干底腹杆41,该若干底腹杆41为沿连接框架10底面的长度方向间隔设置。即底腹杆41一端与连接框架10底面一端相连,底腹杆41另一端与连接框架10底面另一端相连。具体的,底腹杆41可为直杆、x形杆或者其他形状的杆件,底腹杆41采用铸钢、低碳钢、铝合金或镁合金中的一种材质制成。底腹杆41的截面形状为矩形、圆形、椭圆形、圆角矩形、正多边形或者工字形。实际应用中,可采用x形杆,截面为矩形,即包括两个交叉设置的杆体,相邻的底腹杆41之间具有间隔。
31.连接框架10包括两上弦杆11和两下弦杆12,该两上弦杆11互相平行且分别与对应的下弦杆12平行。侧连接杆组30连接于同一侧的上弦杆11和下弦杆12之间,即侧腹杆31一端与上弦杆11相连,另一端与下弦杆12相连。底连接杆组40连接于两下弦杆12之间,即底腹杆41两端分别与两下弦杆12相连。因此,连接框架10、侧连接杆组30、底连接杆组40构成一个顶部开口具有凹槽的结构。其中,侧腹杆31、底腹杆41数量为6-20根,在此不作限定。
32.两安装部20设置于连接框架10两端,一安装部20固定于两上弦杆11和两下弦杆12左端,另一安装部20固定于两上弦杆11和两下弦杆12的右端。安装部20相对连接框架10一端设有连接端面21,侧部设有安装槽22,该安装槽22作为安装工位,可用于连接其它部件。连接框架10与连接端面21之间,两侧连接杆组30和底连接杆组40与连接框架10之间可采用焊接固定。
33.焊接安装时,参见图4,先将侧连接杆组30的若干侧腹杆31焊接于上弦杆11和下弦杆12之间,底连接杆组40的若干底腹杆41焊接于两下弦杆12之间,再将两安装部20焊接于连接框架10的两端。在进行焊接时,应尽量进行两两之间的焊接,尽量避免三个杆件相互交叉的情况,否则有可能出现应力集中度情况。如图1至4所示,侧腹杆31之间、底腹杆41之间都有一定距离隔开,避免了三者交叉的情况。
34.本实用新型中,连接框架10用于连接两个安装部20,起到构建机械臂本体主体框架的作用并承担机械臂轴向方向也即长度方向的力。侧腹杆31连接固定上弦杆11和下弦杆12之间的相对距离,并承担了竖直方向的力;底腹杆41固定两根下弦杆12之间的相对距离,并承担机械臂横向方向也即宽度方向的力和主要的安装部20的轴向力矩。
35.本实用新型还提出一种工业机器人,包括机器人本体,该机器人本体具有上述的一种具有桁架式结构的机械臂。
36.实施例二
37.一种具有桁架式结构的机械臂和机器人,其主要结构与实施例一相同,区别在于:侧连接杆组中,侧腹杆采用x型杆。底连接杆组中,底腹杆采用直杆。
38.上述仅为本实用新型的具体实施方式,但本实用新型的设计构思并不局限于此,凡利用此构思对本实用新型进行非实质性的改动,均应属于侵犯本实用新型保护范围的行为。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1