一种轮式机器人结构本体的制作方法
1.本实用新型涉及机器人领域,具体涉及一种轮式机器人结构本体。
背景技术:
2.在机器人结构变化多样的今天,大多的机器人结构复杂,安装和调整困难,应用成本过高,而一种与人相配的简单形态结构,只要安装上轮子及控制系统即可以运动的实现方式将会更受欢迎。
技术实现要素:
3.本实用新型所要解决的技术问题是提供一种轮式机器人结构本体,以克服上述现有技术中的不足。
4.本实用新型解决上述技术问题的技术方案如下:一种轮式机器人结构本体,包括前轮座、安装梁、后轮动力安装座、减震器和动力电机,安装梁呈u型状,其两个前端部向下弯折并分别与两个前轮座相连,前轮座上设有安装孔a,安装梁的下方布置有两个后轮动力安装座,两个后轮动力安装座的前端分别与两个前轮座的后端转动连接,两个后轮动力安装座的后端分别布置两个减震器,每个减震器的上下两端分别与后轮动力安装座的后端和安装梁的后端转动连接;两个后轮动力安装座的下方分别固定有两个动力电机。
5.本实用新型的有益效果是:配上轮子和控制系统就可以实现本体的移动和转向,可以按用户需求配置和加装面向用户平台的功能,结构简单,模块化装配,可以组装成轮椅,agv自走车,遥控车等等。
6.在上述技术方案的基础上,本实用新型还可以做如下改进。
7.进一步,前轮座上设有安装孔a。
8.采用上述进一步的有益效果为:方便进行前轮的安装。
9.进一步,前轮座上设有安装孔b,安装梁的前端部承插于安装孔b内。
10.采用上述进一步的有益效果为:方便安装梁与前轮座之间进行拆装。
11.进一步,安装梁上在预设位置设有多个具有腰型槽的凸块。
12.采用上述进一步的有益效果为:提供用户安装上部平台的固定接口。
13.进一步,后轮动力安装座呈空心槽状,后轮动力安装座的侧壁上在对应动力电机的刹车开关处设有斜口。
14.采用上述进一步的有益效果为:方便手动操作刹车开关,同时为刹车开关进行开关提供空间。
15.进一步,还包括稳定杆,稳定杆的两端分别与两个前轮座相连。
16.进一步,稳定杆为一拉长的c型板结构,c型板结构的中部具有空心槽。
17.采用上述进两步的有益效果为:在整体结构受载后运动中,通过稳定杆实现横向抗弯和垂直抗扭,提高本体结构的运动适宜性。
18.进一步,还包括电源盒,两个后轮动力安装座之间布置有电源盒。
19.进一步,电源盒的两侧均具有支撑调吊耳,电源盒通过两个支撑调吊耳悬挂于两个后轮动力安装座上。
20.进一步,后轮动力安装座的后端具有活动尾门。
21.采用上述进三步的有益效果为:在置入电源后,整体部分在结构本体上作配重件;方便进行电源的安装和更换。
附图说明
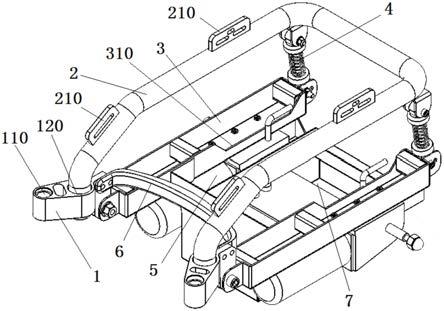
22.图1为本实用新型所述轮式机器人结构本体的结构示意图;
23.图2为本实用新型所述安装梁的结构示意图;
24.图3为本实用新型所述前轮座的结构示意图;
25.图4为本实用新型所述后轮动力安装座的结构示意图;
26.图5为本实用新型所述电源盒的结构示意图;
27.图6为本实用新型所述稳定杆的结构示意图。
28.附图中,各标号所代表的部件列表如下:
29.1、前轮座,110、安装孔a,120、安装孔b,130、螺纹孔,140、销孔,2、安装梁,210、凸块,3、后轮动力安装座,310、斜口,320、铰座,4、减震器,5、动力电机,6、稳定杆,610、过孔,7、电源盒,710、支撑调吊耳,720、活动尾门。
具体实施方式
30.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
31.实施例1
32.如图1~图6所示,一种轮式机器人结构本体,包括前轮座1、安装梁2、后轮动力安装座3、减震器4和动力电机5,安装梁2呈u型状,安装梁2的两个前端部向下弯折并分别与两个前轮座1相连,安装梁2的下方布置有两个后轮动力安装座3,两个后轮动力安装座3的前端分别与两个前轮座1的后端转动连接;两个后轮动力安装座3的后端分别布置两个减震器4,或两个后轮动力安装座3的后端各布置一个减震器4;每个减震器4的上下两端分别与后轮动力安装座3的后端和安装梁2的后端转动连接;两个后轮动力安装座3的下方分别固定有两个动力电机5,或,两个后轮动力安装座3的下方各固定有一个动力电机5。
33.实施例2
34.如图1~图6所示,本实施例为在实施例1的基础上所进行的进一步改进,其具体如下:
35.前轮座1上设有安装孔a110,该安装孔a110主要用于与前轮上的安装杆相配合装配。
36.实施例3
37.如图1~图6所示,本实施例为在实施例1或2的基础上所进行的进一步改进,其具体如下:
38.前轮座1上设有安装孔b120,安装梁2的前端部承插于安装孔b120内,安装梁2前端部的外径等于或略大于安装孔b120的内径。
39.实施例4
40.如图1~图6所示,本实施例为在实施例1或2或3的基础上所进行的进一步改进,其具体如下:
41.安装梁2上在预设位置设有多个具有腰型槽的凸块210,凸块210为用来提供用户安装上部平台的固定接口。
42.实施例5
43.如图1~图6所示,本实施例为在实施例1~4任一实施例的基础上所进行的进一步改进,其具体如下:
44.后轮动力安装座3呈空心槽状,后轮动力安装座3的侧壁上在对应动力电机5的刹车开关处设有斜口310。
45.实施例6
46.如图1~图6所示,本实施例为在实施例1~5任一实施例的基础上所进行的进一步改进,其具体如下:
47.轮式机器人结构本体还包括稳定杆6,稳定杆6的两端分别与两个前轮座1相连,通常情况下,稳定杆6与前轮座1之间采用螺钉进行连接,此时,稳定杆6上开设有过孔610,以便螺钉通过,而前轮座1上开设螺纹孔130,为了调整稳定杆6与前轮座1之间的连接位置,前轮座1上所开设的螺纹孔130的数量为多个,比如,两个、三个等。
48.实施例7
49.如图1~图6所示,本实施例为在实施例6的基础上所进行的进一步改进,其具体如下:
50.稳定杆6为一拉长的c型板结构,c型板结构的中部具有空心槽,在整体结构受载后运动中,通过稳定杆6实现横向抗弯和垂直抗扭,提高本体结构的运动适宜性。
51.实施例8
52.如图1~图6所示,本实施例为在实施例1~7任一实施例的基础上所进行的进一步改进,其具体如下:
53.轮式机器人结构本体还包括电源盒7,两个后轮动力安装座3之间布置有电源盒7,用来给结构本体的动力电机5提供电源固定位置,在置入电源后,整体部分在结构本体上作配重件。
54.电源盒7的两侧均具有支撑调吊耳710,电源盒7通过两个支撑调吊耳710悬挂于两个后轮动力安装座3上,电源盒7可以在后轮动力安装座3上前后滑动。
55.后轮动力安装座3的后端具有活动尾门720,方便进行电源的安装和更换。
56.在各实施例中,后轮动力安装座3与前轮座1实现转动连接的具体形式可以如下:
57.后轮动力安装座3的前端具有铰座320,前轮座1的后端具有销孔140,前轮座1与后轮动力安装座3的铰座320对位后通过穿设销轴连接,实现转动连接。而减震器4与后轮动力安装座3实现转动连接的具体形式以及减震器4与安装梁2实现转动连接的具体形式均可以采用上述方式。
58.尽管上面已经示出和描述了本实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域的普通技术人员在本实用新型的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1