一种考古发掘刮面机器人
1.本实用新型涉及考古发掘技术领域,具体为一种考古发掘刮面机器人。
背景技术:
2.刮面工作是田野考古发掘中的最基础最重要的环节,要求短时间内得到平整新鲜的地层面,考古工作者根据面上显示的土质土色差异辨识出遗迹现象,进而发掘遗迹。因此,刮面效果直接影响了对遗迹的判断和辨识。然而在实际发掘过程中,由于天气情况、土壤干湿度、土质差异、土壤内包含物以及发掘人员刮面水平等因素的影响,导致人工刮面费时费力,甚至多次刮面也难以得到一个平整新鲜的地层面,直接导致工作效率降低、遗迹辨识困难。
技术实现要素:
3.本部分的目的在于概述本实用新型的实施方式的一些方面以及简要介绍一些较佳实施方式。在本部分以及本技术的说明书摘要和实用新型名称中可能会做些简化或省略以避免使本部分、说明书摘要和实用新型名称的目的模糊,而这种简化或省略不能用于限制本实用新型的范围。
4.鉴于上述和/或现有刮面机器人中存在的问题,提出了本实用新型。
5.因此,本实用新型的目的是提供一种考古发掘刮面机器人,可直接代替人工进行刮面,可一定程度上提高刮面的速度、精确控制刮面力度和角度,迅速得到一个新鲜平整地层面以推动遗迹辨识工作,加快考古发掘进程,极大地降低了对遗迹和遗物的损伤。
6.为解决上述技术问题,根据本实用新型的一个方面,本实用新型提供了如下技术方案:
7.一种考古发掘刮面机器人,其包括:机器人机器人壳体,所述机器人机器人壳体的内部安装有机器人主体和传感器系统;
8.机器人主体,包括控制器、视觉获取组件、刮面组件、定位组件、电池管理模块和驱动组件;
9.所述控制器电性连接有视觉获取组件,视觉获取组件用于获取视觉图像信息;
10.所述控制器电性连接有刮面组件,刮面组件用于提供刮面功能;
11.所述控制器电性连接有定位组件,定位组件用于获取机器人的位置信息,并使机器人保持平衡;
12.所述控制器电性连接有电池管理模块,所述电池管理模块电性连接有蓄电池,电池管理模块用于管理蓄电池,提供电力,蓄电池用于存储电力;
13.所述控制器和电池管理模块均电性连接有两个驱动组件,驱动组件用于带动装置移动;
14.传感器系统,包括mcu、感应组件、数传模块、控制组件、视觉控制组件、雷达组件,所述mcu电性连接有感应组件、数传模块、控制组件、视觉控制组件和雷达组件;
15.感应组件用于感应电池的工作情况、机器人的运动姿态和机器人的位置信息;
16.数传模块用于将信息上传到云端;
17.控制组件用于控制电机和电缸工作;
18.视觉控制组件用于将视觉信息发送到远程操作端;
19.雷达组件用于提供雷达功能,感应附近的障碍物。
20.作为本实用新型所述的考古发掘刮面机器人的一种优选方案,其中:所述视觉获取组件包括视觉上位机和第一摄像头,所述第一摄像头电性连接有视觉上位机,所述视觉上位机电性连接有控制器。
21.作为本实用新型所述的考古发掘刮面机器人的一种优选方案,其中:所述刮面组件包括电缸和机械臂,所述控制器电性连接有电缸,所述电缸电性连接有机械臂。
22.作为本实用新型所述的考古发掘刮面机器人的一种优选方案,其中:所述定位组件包括第一蓝牙定位模块和陀螺仪,所述第一蓝牙定位模块和陀螺仪均电性连接有控制器。
23.作为本实用新型所述的考古发掘刮面机器人的一种优选方案,其中:所述驱动组件包括驱动器、电机、减速器和右侧履带,所述控制器电性连接有驱动器,所述驱动器电性连接有电机,所述电机电性连接有减速器,所述减速器电性连接有右侧履带。
24.作为本实用新型所述的考古发掘刮面机器人的一种优选方案,其中:所述感应组件包括电池监控管理模块、运动姿态模块和第二蓝牙定位模块,所述电池监控管理模块、运动姿态模块和第二蓝牙定位模块均电性连接有mcu。
25.作为本实用新型所述的考古发掘刮面机器人的一种优选方案,其中:所述控制组件包括电机控制模块和电缸控制模块,所述mcu电性连接有电机控制模块和电缸控制模块。
26.作为本实用新型所述的考古发掘刮面机器人的一种优选方案,其中:所述视觉控制组件包括视觉通讯模块、视觉控制器和第二摄像头,所述第二摄像头电性连接有视觉控制器,所述视觉控制器电性连接有视觉通讯模块。
27.作为本实用新型所述的考古发掘刮面机器人的一种优选方案,其中:所述雷达组件包括后置雷达和左右雷达,所述后置雷达和左右雷达均电性连接有mcu。
28.与现有技术相比:该考古发掘刮面机器人,可直接代替人工进行刮面,可一定程度上提高刮面的速度、精确控制刮面力度和角度,迅速得到一个新鲜平整地层面以推动遗迹辨识工作,加快考古发掘进程,极大地降低了对遗迹和遗物的损伤。
附图说明
29.为了更清楚地说明本实用新型实施方式的技术方案,下面将结合附图和详细实施方式对本实用新型进行详细说明,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。其中:
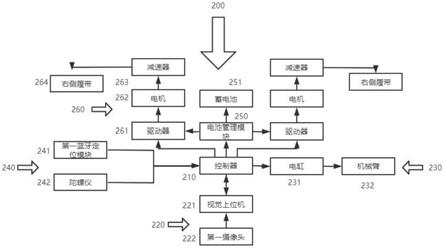
30.图1为本实用新型的考古发掘刮面机器人整体构架;
31.图2为本实用新型的传感器系统构架;
32.图3为本实用新型的自主刮面工作原理图;
33.图4为本实用新型的自主刮面工作示意图;
34.图5为本实用新型的遥控刮面工作原理图;
35.图6为本实用新型的遥控刮面工作示意图;
36.图7为本实用新型的等轴测图。
37.图中:100机器人壳体、200机器人主体、210控制器、220视觉获取组件、221视觉上位机、222第一摄像头、230刮面组件、231电缸、232机械臂、240定位组件、241第一蓝牙定位模块、242陀螺仪、250电池管理模块、251蓄电池、260驱动组件、261驱动器、262电机、263减速器、264右侧履带、300传感器系统、310mcu、320感应组件、321电池监控管理模块、322运动姿态模块、323第二蓝牙定位模块、330数传模块、340控制组件、341电机控制模块、342电缸控制模块、350视觉控制组件、351视觉通讯模块、352视觉控制器、353第二摄像头、360雷达组件、361后置雷达、362左右雷达。
具体实施方式
38.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图对本实用新型的具体实施方式做详细的说明。
39.在下面的描述中阐述了很多具体细节以便于充分理解本实用新型,但是本实用新型还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下做类似推广,因此本实用新型不受下面公开的具体实施方式的限制。
40.其次,本实用新型结合示意图进行详细描述,在详述本实用新型实施方式时,为便于说明,表示器件结构的剖面图会不依一般比例作局部放大,而且示意图只是示例,其在此不应限制本实用新型保护的范围。此外,在实际制作中应包含长度、宽度及深度的三维空间尺寸。
41.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型的实施方式作进一步地详细描述。
42.本实用新型提供一种考古发掘刮面机器人,可直接代替人工进行刮面,可一定程度上提高刮面的速度、精确控制刮面力度和角度,迅速得到一个新鲜平整地层面以推动遗迹辨识工作,加快考古发掘进程,极大地降低了对遗迹和遗物的损伤。
43.图1-图7示出的是本实用新型一种考古发掘刮面机器人一实施方式的结构示意图,请参阅图1-图7,本实施方式的一种考古发掘刮面机器人,其主体部分包括;
44.机器人机器人壳体100,所述机器人机器人壳体100的内部安装有机器人主体200和传感器系统300;
45.机器人主体200,包括控制器210、视觉获取组件220、刮面组件230、定位组件240、电池管理模块250和驱动组件260;
46.所述控制器210电性连接有视觉获取组件220,视觉获取组件220用于获取视觉图像信息;
47.所述控制器210电性连接有刮面组件230,刮面组件230用于提供刮面功能;
48.所述控制器210电性连接有定位组件240,定位组件240用于获取机器人的位置信息,并使机器人保持平衡;
49.所述控制器210电性连接有电池管理模块250,所述电池管理模块250电性连接有蓄电池251,电池管理模块250用于管理蓄电池251,提供电力,蓄电池251用于存储电力;
50.所述控制器210和电池管理模块250均电性连接有两个驱动组件260,驱动组件260用于带动装置移动;
51.传感器系统300,包括mcu310、感应组件320、数传模块330、控制组件340、视觉控制组件350、雷达组件360,所述mcu310电性连接有感应组件320、数传模块330、控制组件340、视觉控制组件350和雷达组件360;
52.感应组件320用于感应电池的工作情况、机器人的运动姿态和机器人的位置信息;
53.数传模块330用于将信息上传到云端;
54.控制组件340用于控制电机262和电缸231工作;
55.视觉控制组件350用于将视觉信息发送到远程操作端;
56.雷达组件360用于提供雷达功能,感应附近的障碍物。
57.请再次参阅图1-图7,所述视觉获取组件220包括视觉上位机221和第一摄像头222,所述第一摄像头222电性连接有视觉上位机221,所述视觉上位机221电性连接有控制器210。
58.请再次参阅图1-图7,所述刮面组件230包括电缸231和机械臂232,所述控制器210电性连接有电缸231,所述电缸231电性连接有机械臂232。
59.请再次参阅图1-图7,所述定位组件240包括第一蓝牙定位模块241和陀螺仪242,所述第一蓝牙定位模块241和陀螺仪242均电性连接有控制器210。
60.请再次参阅图1-图7,所述驱动组件260包括驱动器261、电机262、减速器263和右侧履带264,所述控制器210电性连接有驱动器261,所述驱动器261电性连接有电机262,所述电机262电性连接有减速器263,所述减速器263电性连接有右侧履带264。
61.请再次参阅图1-图7,所述感应组件320包括电池监控管理模块321、运动姿态模块322和第二蓝牙定位模块323,所述电池监控管理模块321、运动姿态模块322和第二蓝牙定位模块323均电性连接有mcu310。
62.请再次参阅图1-图7,所述控制组件340包括电机控制模块341和电缸控制模块342,所述mcu310电性连接有电机控制模块341和电缸控制模块342。
63.请再次参阅图1-图7,所述视觉控制组件350包括视觉通讯模块351、视觉控制器352和第二摄像头353,所述第二摄像头353电性连接有视觉控制器352,所述视觉控制器352电性连接有视觉通讯模块351。
64.请再次参阅图1-图7,所述雷达组件360包括后置雷达361和左右雷达362,所述后置雷达361和左右雷达362均电性连接有mcu310。
65.实施例1
66.自主操作模式
67.自主操作模式适用于对固定区域进行刮面,如发掘之初对4
×
4、5
×
5或者整个发掘区进行刮面。
68.全自动化操作按钮启动机器人,机器人进入自主操作模式。
69.机器人于起始点调整机械臂232,使前端手铲与地面接触,且呈45
°
角度。
70.机器人自起始位置自主进行直线移动,行进过程中保持手铲刃部与地面接触且呈45
°
。
71.行至探方壁障碍物停下,进行180
°
转弯,转弯完成时,抬起机械臂232使手铲与前
端刮板接触,将手铲上泥土刮掉。
72.再次自主进行直线移动。循环上述动作,蛇形完成一个区域内的刮面工作图1,2。
73.实施例2
74.遥控操作模式
75.遥控操作模式适用于考古发掘中的任何时候,为适应发掘现场刮面区域多变、遗迹现象复杂的情况,需人工遥控机器人进行刮面工作。
76.全自动化操作按钮启动机器人,机器人进入自主操作模式。
77.机器人于起始点调整机械臂232,使前端手铲与地面接触,且呈45
°
角度。
78.可直接遥控机器人进行移动,或令机器人自起始位置自主进行直线移动,行进过程中保持手铲刃部与地面接触且呈45
°
。
79.机器人行进过程中触碰探方壁或感知坑状等障碍物时自动停于原地,等待遥控再次行进。
80.行驶过程中可随时接受遥控“刮铲”指令,抬起机械臂232使手铲与刮板接触,将手铲上泥土刮掉。
81.直至完成一个区域内的刮面工作图3,4。
82.1机器人主体200
83.履带式设计可使机器人运行不受天气情况、土壤干湿度、土质差异影响,实现全地域工作自动化行驶、作业图5。
84.2传感器系统300
85.为保证机器人能够应对各种复杂的现场环境,如:车体姿态控制、车前障碍物检测、侧方距离探测、行进路线探测、电池监控等,车体设计安装多套传感器辅助运行图6。
86.3机械臂232
87.机械臂232主要完成对手铲与地面、手铲与刮板的接触形态控制,采用4个电缸231完成对机械臂232的转动、上下摆动控制及对前端手铲的上下摆动控制。
88.4智能决策及自体控制
89.通过环境的感知及定位,拟采用行为树算法决策无人车的执行动作。这些动作包含停止、前进、后退、转弯、刮面、突发情况等。对于突发情况,如重要模块失灵,设计相应的防护措施。
90.通过应用串级双闭环pid算法进行控制,可以使电机262转速更加平滑,防止转速的突然转变,实现稳定驱动。
91.虽然在上文中已经参考实施方式对本实用新型进行了描述,然而在不脱离本实用新型的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在结构冲突,本实用新型所披露的实施方式中的各项特征均可通过任意方式相互结合起来使用,在本说明书中未对这些组合的情况进行穷举性的描述仅仅是出于省略篇幅和节约资源的考虑。因此,本实用新型并不局限于文中公开的特定实施方式,而是包括落入权利要求的范围内的所有技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1