一种智能连杆式机械手
1.本实用新型涉及机械手领域,特别是指一种智能连杆式机械手。
背景技术:
2.机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行智能作业。目前市场上的机械臂虽然种类和数量非常多,但是大多数的机械臂在工作完成后,都是直接置于工作工位上,非常容易积攒灰尘,对机械臂的工作性能产生破坏。
技术实现要素:
3.针对上述背景技术提出的不足,本实用新型提供一种智能连杆式机械手。
4.本实用新型采用如下技术方案包括有底座、防尘机构和机械臂主体,所述底座上设有机械臂主体,所述防尘机构用于防止该机械臂主体积灰,且防尘机构设于所述底座的安装槽内,所述安装槽为环形结构,且安装槽环绕于机械臂主体周围,所述防尘机构包括,
5.移动框,所述移动框为环形结构,该移动框设于所述安装槽上方,且移动框可相对底座上下移动;
6.防尘套,所述防尘套为空心圆柱结构,该防尘套的两端分别连接至所述移动框底面和安装槽内壁上,且防尘套采用柔性材料制成,可堆叠,当移动框上移时,该防尘套套于所述机械臂主体外侧;
7.连接环,所述连接环设有若干个,若干连接环竖向依次设于所述移动框下方,且连接环均与防尘套表面固定连接,相邻连接环之间的防尘套折叠在一起;
8.盖板,所述盖板为圆形板,该盖板可拆卸的连接至所述移动框上。
9.作为进一步的改进,所述机械臂主体由连接座、一号连接臂和二号连接臂组成,所述连接座可转动的设于所述底座上,所述一号连接臂和二号连接臂铰接,且一号连接臂可转动的连接至该连接座上。
10.作为进一步的改进,所述防尘套由底布和套于所述底布外侧的表布组成,该底布和表布均采用柔性材料制成。
11.作为进一步的改进,所述底布和表布之间设有冷却囊,所述冷却囊两侧分别与该底布和表布相黏合,该冷却囊可用于吸热降温。
12.作为进一步的改进,所述底座侧面上设有向内凹陷的放置槽,该放置槽用于存放盖板,该盖板可相对放置槽左右移动。
13.由上述对本实用新型结构的描述可知,和现有技术相比,本实用新型具有如下优点:该机械手包括底座、防尘机构和机械臂主体,底座上设有机械臂主体和防尘机构,防尘机构用于防止机械臂主体积灰。防尘机构包括移动框、连接环、防尘套和盖板。环形移动框
可上下移动的设于底座的环形安装槽上方。采用柔性材料制成的防尘套两端分别设于移动框和安装槽上,当移动框上移时,防尘套套于机械臂主体外侧。若干连接环竖向依次设于移动框下方,连接环均与防尘套表面固定连接,相邻连接环之间的防尘套折叠在一起。圆形盖板可拆卸的设于移动框上。采用上述移动框带动防尘套上移,套于机械臂主体外侧的结构,可有效避免机械臂主体进水、积灰,保证机械臂主体的整洁度和工作性能。
附图说明
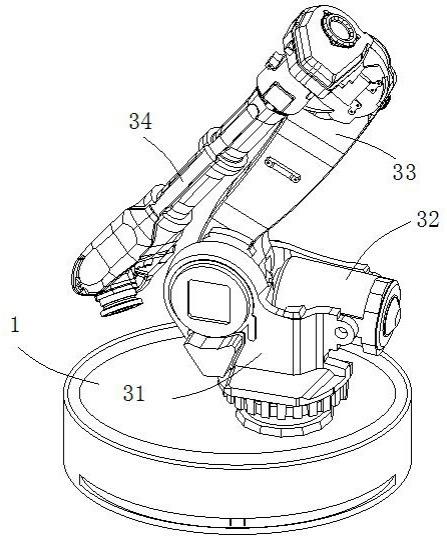
14.图1为本实用新型的立体结构示意图。
15.图2为底座和防尘机构的立体连接结构示意图。
16.图3为底座和防尘机构的剖面结构示意图。
17.图4为图3中a的结构示意图。
18.图5为防尘套的剖面结构示意图。
19.图6为移动框和防尘套上移后的结构示意图。
具体实施方式
20.下面参照附图说明本实用新型的具体实施方式。
21.如附图1所示,一种智能连杆式机械手包括有底座1、防尘机构2和机械臂主体3,所述底座1上设有机械臂主体3和防尘机构2,所述防尘机构2用于防止该机械臂主体3积灰,其中,所述机械臂主体3由连接座31、一号连接臂33和二号连接臂34组成,所述连接座31可转动的设于所述底座1上,连接座31由固定于底座1上的电机驱动,所述一号连接臂33和二号连接臂34铰接,二号连接臂34的转动通过固定至一号连接臂33上的电机驱动,且一号连接臂33可转动的连接至该连接座31上,一号连接臂33的转动通过固定连接座31上的气缸32驱动,在操作时,通过编程控制气缸32、固定至一号连接臂33上的电机还有固定于底座1上的电机进行动作,以实现机械臂主体3的六轴移动和智能操作。
22.如附图2、3和4所示,所述防尘机构2包括移动框21、连接环22、防尘套23和盖板24。
23.如附图2和6所示,所述移动框21为环形结构,该移动框21设于所述底座1的环形安装槽11上方,且安装槽11环绕于机械臂主体3周围,所述移动框21可相对底座1上下移动,所述防尘套23为空心圆柱结构,该防尘套23的两端分别连接至所述移动框21底面和安装槽11内壁上,且防尘套23采用柔性材料制成,可堆叠收纳到安装槽11内,实现防尘套23的整理收纳,减小防尘套23的占地空间,且能避免防尘套23随意堆放造成的积灰污染的风险,在操作时,通过移动框21的移动,可使防尘套23展开,套于机械臂主体3外侧,防止机械臂主体3表面积灰,从而避免机械臂主体3长期沾染灰尘导致机械臂主体3出现故障,影响智能操作的准确性的风险。
24.如附图5所示,进一步的,所述防尘套23由底布231和套于所述底布231外侧的表布232组成,该底布231和表布232均采用柔性材料制成,具体的,底布231采用透气面料:如棉制成,而表布232采用防水透气面料制成,防水透气面料是由高分子防水透气材料(ptfe膜)与布料复合而成,具有良好的防水、透气、透湿等优点,在操作时,底布231和表布232共同套于机械臂主体3外侧,而采用双重防尘结构,可避免机械臂主体3进水、积灰,保证机械臂主体3的整洁度和工作性能,同时底布231和表布232采用透气材料制成,可使机械臂主体3在
使用过程中产生的还未消散完全的热量能够顺利透过底布231和表布232,传递到外界大气中,避免机械臂主体3高温损坏。另外,所述底布231和表布232之间设有冷却囊233,所述冷却囊233两侧分别与该底布231和表布232相黏合,该冷却囊233是将水密封在薄膜内水袋,当机械臂主体3使用过程中产生的还未消散完全的热量穿过底布231与冷却囊233接触后,该冷却囊233内的水可快速吸收热量,进一步促进机械臂主体3和底布231内空气的降温,提高降温、散热效果。
25.如附图3、4和6所示,所述连接环22设有若干个,若干连接环22竖向依次设于所述移动框21下方,且连接环22均与防尘套23表面固定连接,相邻连接环22之间的防尘套23折叠在一起,该连接环22的设置,可对防尘套23的折叠起到一定导向作用,使防尘套23在下移进入安装槽11内时可一层一层平整的堆叠到一起,避免防尘套23在堆叠过程中出现大的歪斜导致防尘套23的收纳进度降低。
26.如附图3和6所示,所述盖板24为圆形板,该盖板24通过螺纹可拆卸的连接至所述移动框21上,当将移动框21移动至机械臂主体3顶部,使防尘套23完全套于机械臂主体3时,通过将盖板24旋到移动框21上,再将盖板24置于机械臂主体3顶部,可使盖板24和防尘套23完全将机械臂主体3罩住,防止机械臂主体3积灰。进一步的,所述底座1侧面上设有向内凹陷的放置槽12,该放置槽12用于存放盖板24,该盖板24可相对放置槽12左右移动,当不需要使用盖板24时,可将盖板24嵌入放置槽12内进行存放,充分利用底座1内的空间,以避免盖板24随处放置导致丢失,且所述盖板24靠近放置槽12槽口的一端上贯穿有通孔241,当需要取出盖板24时,可将手指伸入通孔241内,以便于快速拉出盖板24。
27.当机械臂主体3使用完毕后,先向上拉动移动框21,使堆叠在安装槽11内的连接环22和防尘套23逐渐展开,套在机械臂主体3外侧,直至移动框21移动至机械臂主体3顶部,防尘套23完全套于机械臂主体3后,将放置槽12内的盖板24拉出,将盖板24旋到移动框21上,再将盖板24置于机械臂主体3顶部,使盖板24和防尘套23完全将机械臂主体3罩住,防止机械臂主体3积灰。而防尘套23的底布231和表布232共同套于机械臂主体3外侧,具有双重防尘效果,可有效避免机械臂主体3进水、积灰,保证机械臂主体3的整洁度和工作性能,同时底布231和表布232采用透气材料制成,可使机械臂主体3在使用过程中产生的还未消散完全的热量能够顺利透过底布231和表布232,传递到外界大气中,避免机械臂主体3高温损坏。另外,当机械臂主体3使用过程中产生的还未消散完全的热量穿过底布231与冷却囊233接触后,冷却囊233内的水可快速吸收热量,进一步促进机械臂主体3和底布231内空气的降温,提高降温、散热效果。且当不需要使用防尘套23时,可将防尘套23和盖板24分别收纳至安装槽11和放置槽12内,减少防尘套23和盖板24的占地空间,使机械手整体更加整洁美观。
28.上述仅为本实用新型的具体实施方式,但本实用新型的设计构思并不局限于此,凡利用此构思对本实用新型进行非实质性的改动,均应属于侵犯本实用新型保护范围的行为。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1