一种可移动机械臂式物流分拣机器人
1.本实用新型涉及分拣技术领域,具体涉及一种可移动机械臂式物流分拣机器人。
背景技术:
2.自动物流分拣系统是一种可以实现对货物的自动分拣,从而不需要人工进行参与分拣的自动化系统,自动物流分拣系统主要有以下几个方面的特点:
3.1、能连续、大批量地分拣货物。自动物流分拣系统不受气候、时间、人的体力等的限制,可以连续运行,同时由于自动物流分拣系统单位时间分拣件数多,因此自动物流分拣系统的分拣能力是连续运行100个小时以上,每小时可分拣7000件包装商品,如用人工则每小时只能分拣150件左右,同时分拣人员也不能在这种劳动强度下连续工作8小时。
4.2、分拣误差率极低。自动物流分拣系统的分拣误差率大小主要取决于所输入分拣信息的准确性大小,这又取决于分拣信息的输入机制,如果采用人工键盘或语音识别方式输入,则误差率在3%以上,如采用条形码扫描输入,除非条形码的印刷本身有差错,否则不会出错,因此,目前自动物流分拣系统主要采用条形码技术来识别货物,自动物流分拣系统的分拣武昌路极低。
5.3、分拣作业基本实现无人化。自动物流分拣系统的目的之一就是为了减少人员的使用,减轻工员的劳动强度,提高人员的使用效率,因此自动物流分拣系统能最大限度地减少人员的使用,基本做到无人化。
6.物流分拣机器人是自动物流分拣系统的重要组成部分,物流分拣机器人一般包括机器人本体、行走机构和机械臂,其中行走机构用于控制物流分拣机器人的移动,而机械臂则用于对分拣物品进行抓取,进而实现对物品的分拣效果。
7.现有技术中物流分拣机器人的机械臂的运动一般采用舵机进行驱动,采用舵机进行驱动的机械臂对舵机本身的性能要求较高,同时由于机械臂的运动较为复杂,而一个舵机往往只能对机械臂的一个自由堵进行控制,故一个机械臂上需要安装多个舵机,而舵机需要的数量较多会直接导致使用成本的提高,同时多个舵机并用或连用还会使得整体的控制和结构都较为复杂。
技术实现要素:
8.针对现有技术存在的上述不足,本实用新型要解决的技术问题是:如何提供一种使用成本底且控制和结构较为简单的可移动机械臂式物流分拣机器人。
9.为了解决上述技术问题,本实用新型采用如下技术方案:
10.一种可移动机械臂式物流分拣机器人,包括机器人本体、行走机构和机械臂机构,所述机械臂机构转动连接在所述机器人本体上,所述机械臂机构包括机械臂组件和机械臂驱动组件,所述机械臂组件包括主臂、手臂和手腕支架,所述手臂的两端分别与对应位置的所述主臂和所述手腕支架转动连接,所述机械臂驱动组件包括第一旋转驱动件、第二旋转驱动件和第三旋转驱动件,所述第一旋转驱动件通过第一连杆组件与所述手臂连接,以使
得所述第一旋转驱动件转动时能够通过所述第一连杆组件带动所述手臂绕所述主臂转动,所述第二旋转驱动件与所述主臂固定连接,以使得所述第二旋转驱动件转动时能够带动所述主臂转动,所述第三旋转驱动件能够带动所述机械臂机构绕所述机器人本体转动,在所述手臂与所述主臂的转动连接处还设有第二连杆组件,且所述第二连杆组件与所述手腕支架转动连接,以使得所述手臂绕所述主臂转动时能够通过所述第二连杆组件带动所述手腕支架转动。
11.本实用新型的工作原理是:本方案的物流分拣机器人在使用时,利用第三旋转驱动件能够带动机械臂机构绕机器人本体转动,从而实现机械臂机构在周向360
°
的转动;利用第一旋转驱动件转动,第一旋转驱动件转动再进一步通过第一连杆组件带动手臂绕主臂转动,由此实现对手臂运动的控制,同时第一旋转驱动件在带动手臂绕主臂转动时,手臂与主臂转动连接处设置的第二连杆组件还能进一步带动手腕支架转动,由此第一旋转驱动件的转动就实现了对手臂转动和手腕支架转动的双重控制;另外利用第二旋转驱动件转动,由于主臂是与第二旋转驱动件固定连接的,故第二旋转驱动件的转动将带动主臂同步转动,由此实现对主臂运动的控制。
12.综上,本方案利用三个旋转驱动件就可以实现对机械臂机构四个自由度的控制,与传统利用舵机分别对机械臂的每个运动方向进行控制的方式相比,本方案对驱动件的需求数量减少,从而使得使用成本降低,同时控制和结构也更加的简单。
13.优选的,所述机械臂机构通过支撑座转动连接在所述机器人本体上,所述第三旋转驱动件为第三电机,所述第三电机的转轴与所述支撑座连接,以使得所述第三电机能够带动所述支撑座绕所述机器人本体转动。
14.这样,第三旋转驱动件采用第三电机,电机的使用成本底且使用性能稳定可靠,当第三电机转动时,第三电机的转轴将带动支撑座绕机器人本体转动,进而实现机械臂机构绕机器人本体转动的目的。
15.优选的,所述第一旋转驱动件为第一电机,所述第一电机的转轴上转动连接有第一摇杆,所述第一摇杆远离其连接所述第一电机的一端转动连接有第一连杆,所述第一连杆远离其连接所述第一摇杆的一端向上延伸并与对应位置的所述手臂转动连接。
16.这样,第一旋转驱动件为第一电机,第一电机旋转时带动第一摇杆转动,第一摇杆转动再进一步带动第一连杆转动,第一连杆转动再进一步带动手臂转动,由此通过对第一电机的控制就可以实现对手臂的转动控制。
17.优选的,所述第二旋转驱动件为第二电机,所述第二电机的转轴上设有联轴器,所述主臂套设在所述第二电机的转轴上并与所述联轴器固定连接。
18.这样,第二电机的转轴上套设联轴器,主臂再与联轴器固定连接,这样当第二电机转动时,第二电机的转轴通过联轴器实现同步带动主臂运动的目的,由此通过对第二电机的控制就实现了对主臂运动的控制。
19.优选的,所述主臂与所述手臂通过第一转动件进行转动连接,在所述第一转动件上转动连接有整体呈三角形结构的中间连杆,所述中间连杆靠近所述手腕支架的一端转动连接有第二长连杆,所述第二长连杆远离其连接所述中间连杆的一端与所述手腕支架转动连接,所述中间连杆远离所述手腕支架的一端转动连接有第二短连杆,所述第二短连杆远离其连接所述中间连杆的一端转动连接有竖向连杆,所述竖向连杆远离其连接所述第二短
连杆的一端竖向下延伸并与对应位置的支撑座固定连接。
20.这样,通过在主臂和手臂的转动连接的第一转动件上设置中间连杆,并将中间连杆整体设置为三角形结构,这样中间连杆的一端连接在中间连杆上,另一端则分别连接第二长连杆和第二短连杆,第二长连杆的另一端则与手腕支架连接,这样当第一旋转驱动件带动手臂绕主臂转动时,手臂还将通过第一转动件带动中间连杆转动,中间连杆转动再进一步通过第二长连杆带动手腕支架转动,由此第一旋转驱动件不仅实现了带动手臂转动的目的,还同时实现了带动手腕支架转动的目的。
21.优选的,所述第一旋转驱动件和所述第二旋转驱动件均固定安装在所述支撑座上。
22.优选的,所述行走机构包括对称分布在所述机器人本体两侧的行走组件,所述行走组件通过骨架连接在所述机器人本体上,所述行走组件包括行走驱动件、前进轮、横向轮和传动组件,所述行走驱动件、所述前进轮和所述横向轮通过所述传动组件进行连接,且所述前进轮在两侧的所述行走驱动件的作用力相同时能够带动所述机器人本体前进或后退,所述横向轮在两侧的所述行走驱动件的作用力不同时能够带动所述机器人本体横向移动。
23.这样,当行走机构需要控制机器人本体行走时,行走驱动件的动力通过传动组件传递给前进轮和横向轮,具体控制时,通过对两侧行走驱动件作用力的控制来实现对机器人运动的控制,当两侧行走驱动件的作用力相同时,前进轮带动机器人实现前进或后退运动,当两侧行走驱动件的作用力不相同时,两侧行走驱动件的作用力差将会转化为横向轮的横向力,横向轮在该横向力的作用下带动机器人本体横向移动,由此本方案即实现了机器人的横向移动同时也实现了机器人的径向移动,以此更好的满足机器人的移动需求。
24.优选的,在所述骨架上沿所述机器人本体前进方向的两侧分别设有第一车轮轴和第二车轮轴,所述行走驱动件为行走驱动电机,所述前进轮为胶轮,所述横向轮为能够横向滑动的组合轮,所述胶轮套设在所述第一车轮轴上,所述组合轮套设在所述第二车轮轴上,所述传动组件包括第一同步带轮、第二同步带轮、以及套设在所述第一同步带轮和所述第二同带轮上的同步带,所述第一同步带轮连接在所述行走驱动电机的转轴上,所述第二同步带轮连接在所述第一车轮轴上,在所述第二车轮轴上还套设有固定架,所述固定架还与对应位置的所述同步带固定连接。
25.这样,当需要控制机器人移动时,行走驱动电机转动,行走驱动电机转动时通过其转轴带动第一同步带轮转动,第一同步带轮转动再通过同步带带动第二同步带轮转动,第二同步带轮转动再进一步通过第一车轮轴带动胶轮转动,且同步带转动还将通过固定架和第二车轮轴进一步带动组合轮转动,当两侧行走驱动电机的作用力相同时,胶轮带动机器人实现前进或后退运动,当两侧行走驱动电机的作用力不相同时,两侧行走驱动电机的作用力差将会转化为组合轮的横向力,组合轮在该横向力的作用下将带动机器人本体横向移动,由此本方案即实现了机器人的横向移动同时也实现了机器人的径向移动,以此更好的满足机器人的移动需求。
26.优选的,所述骨架包括内骨架和外骨架,所述内骨架与所述及机器人本体固定连接,且所述行走驱动件固定连接在所述外骨架上。
27.这样,通过将内骨架连接在机器人本体上,将行走驱动件安装在外骨架上,以便实现通过骨架将行走机构安装在机器人本体上的目的。
28.优选的,所述行走驱动电机为直流无刷电机。
29.这样,直流无刷电机的使用成本底且使用性能稳定可靠。
附图说明
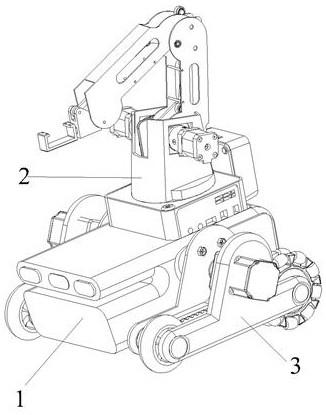
30.图1为本实用新型可移动机械臂式物流分拣机器人的结构示意图;
31.图2为本实用新型可移动机械臂式物流分拣机器人中机械臂机构的结构示意图;
32.图3为本实用新型可移动机械臂式物流分拣机器人中机械臂机构其中一个视角的爆炸示意图;
33.图4为本实用新型可移动机械臂式物流分拣机器人中机械臂机构另一个视角的爆炸示意图;
34.图5为本实用新型可移动机械臂式物流分拣机器人中行走机构的结构示意图;
35.图6为本实用新型可移动机械臂式物流分拣机器人中行走机构另一视角的结构示意图(去除内骨架)。
36.附图标记说明:机器人本体1、机械臂机构2、支撑座201、第三电机202、第一电机203、第二电机204、主臂205、手臂206、手腕支架207、联轴器208、第一摇杆209、第一连杆210、中间连杆211、第二长连杆212、第二短连杆213、竖向连杆214、第一转动件215、行走机构3、内骨架301、外骨架302、行走驱动电机303、胶轮304、同步带305、组合轮306、第一车轮轴307、第二车轮轴308、第二同步带轮309、第一同步带轮310、固定架311。
具体实施方式
37.下面将结合附图及实施例对本实用新型作进一步说明。
38.如附图1和附图2所示,一种可移动机械臂式物流分拣机器人,包括机器人本体1、行走机构3和机械臂机构2,机械臂机构2转动连接在机器人本体1上,机械臂机构2包括机械臂组件和机械臂驱动组件,机械臂组件包括主臂205、手臂206和手腕支架207,手臂206的两端分别与对应位置的主臂205和手腕支架207转动连接,机械臂驱动组件包括第一旋转驱动件、第二旋转驱动件和第三旋转驱动件,第一旋转驱动件通过第一连杆组件与手臂206连接,以使得第一旋转驱动件转动时能够通过第一连杆组件带动手臂206绕主臂205转动,第二旋转驱动件与主臂205固定连接,以使得第二旋转驱动件转动时能够带动主臂205转动,第三旋转驱动件能够带动机械臂机构2绕机器人本体1转动,在手臂206与主臂205的转动连接处还设有第二连杆组件,且第二连杆组件与手腕支架207转动连接,以使得手臂206绕主臂205转动时能够通过第二连杆组件带动手腕支架207转动。
39.本实用新型的工作原理是:本方案的物流分拣机器人在使用时,利用第三旋转驱动件能够带动机械臂机构2绕机器人本体1转动,从而实现机械臂机构2在周向360
°
的转动;利用第一旋转驱动件转动,第一旋转驱动件转动再进一步通过第一连杆组件带动手臂206绕主臂205转动,由此实现对手臂206运动的控制,同时第一旋转驱动件在带动手臂206绕主臂205转动时,手臂206与主臂205转动连接处设置的第二连杆组件还能进一步带动手腕支架207转动,由此第一旋转驱动件的转动就实现了对手臂206转动和手腕支架207转动的双重控制;另外利用第二旋转驱动件转动,由于主臂205是与第二旋转驱动件固定连接的,故第二旋转驱动件的转动将带动主臂205同步转动,由此实现对主臂205运动的控制。
40.综上,本方案利用三个旋转驱动件就可以实现对机械臂机构2四个自由度的控制,与传统利用舵机分别对机械臂的每个运动方向进行控制的方式相比,本方案对驱动件的需求数量减少,从而使得使用成本降低,同时控制和结构也更加的简单。
41.在本实施例中,机械臂机构2通过支撑座201转动连接在机器人本体1上,第三旋转驱动件为第三电机202,第三电机202的转轴与支撑座201连接,以使得第三电机202能够带动支撑座201绕机器人本体1转动。在支撑座201外还设有支座,支座主要用于对第三电机202进行保护。
42.这样,第三旋转驱动件采用第三电机202,电机的使用成本底且使用性能稳定可靠,当第三电机202转动时,第三电机202的转轴将带动支撑座201绕机器人本体1转动,进而实现机械臂机构2绕机器人本体1转动的目的。
43.如附图3所示,在本实施例中,第一旋转驱动件为第一电机203,第一电机203的转轴上转动连接有第一摇杆209,第一摇杆209远离其连接第一电机203的一端转动连接有第一连杆210,第一连杆210远离其连接第一摇杆209的一端向上延伸并与对应位置的手臂206转动连接。
44.这样,第一旋转驱动件为第一电机203,第一电机203旋转时带动第一摇杆209转动,第一摇杆209转动再进一步带动第一连杆210转动,第一连杆210转动再进一步带动手臂206转动,由此通过对第一电机203的控制就可以实现对手臂206的转动控制。
45.在本实施例中,第二旋转驱动件为第二电机204,第二电机204的转轴上设有联轴器208,主臂205套设在第二电机204的转轴上并与联轴器208固定连接。
46.这样,第二电机204的转轴上套设联轴器208,主臂205再与联轴器208固定连接,这样当第二电机204转动时,第二电机204的转轴通过联轴器208实现同步带305动主臂205运动的目的,由此通过对第二电机204的控制就实现了对主臂205运动的控制。
47.如附图4所示,在本实施例中,主臂205与手臂206通过第一转动件215进行转动连接,在第一转动件215上转动连接有整体呈三角形结构的中间连杆211,中间连杆211靠近手腕支架207的一端转动连接有第二长连杆212,第二长连杆212远离其连接中间连杆211的一端与手腕支架207转动连接,中间连杆211远离手腕支架207的一端转动连接有第二短连杆213,第二短连杆213远离其连接中间连杆211的一端转动连接有竖向连杆214,竖向连杆214远离其连接第二短连杆213的一端竖向下延伸并与对应位置的支撑座201固定连接。
48.这样,通过在主臂205和手臂206的转动连接的第一转动件215上设置中间连杆211,并将中间连杆211整体设置为三角形结构,这样中间连杆211的一端连接在中间连杆211上,另一端则分别连接第二长连杆212和第二短连杆213,第二长连杆212的另一端则与手腕支架207连接,这样当第一旋转驱动件带动手臂206绕主臂205转动时,手臂206还将通过第一转动件215带动中间连杆211转动,中间连杆211转动再进一步通过第二长连杆212带动手腕支架207转动,由此第一旋转驱动件不仅实现了带动手臂206转动的目的,还同时实现了带动手腕支架207转动的目的。
49.在本实施例中,第一旋转驱动件和第二旋转驱动件均固定安装在支撑座201上。
50.如附图5和附图6所示,在本实施例中,行走机构3包括对称分布在机器人本体1两侧的行走组件,行走组件通过骨架连接在机器人本体1上,行走组件包括行走驱动件、前进轮、横向轮和传动组件,行走驱动件、前进轮和横向轮通过传动组件进行连接,且前进轮在
两侧的行走驱动件的作用力相同时能够带动机器人本体1前进或后退,横向轮在两侧的行走驱动件的作用力不同时能够带动机器人本体1横向移动。
51.这样,当行走机构3需要控制机器人本体1行走时,行走驱动件的动力通过传动组件传递给前进轮和横向轮,具体控制时,通过对两侧行走驱动件作用力的控制来实现对机器人运动的控制,当两侧行走驱动件的作用力相同时,前进轮带动机器人实现前进或后退运动,当两侧行走驱动件的作用力不相同时,两侧行走驱动件的作用力差将会转化为横向轮的横向力,横向轮在该横向力的作用下带动机器人本体1横向移动,由此本方案即实现了机器人的横向移动同时也实现了机器人的径向移动,以此更好的满足机器人的移动需求。
52.在本实施例中,在骨架上沿机器人本体1前进方向的两侧分别设有第一车轮轴307和第二车轮轴308,行走驱动件为行走驱动电机303,前进轮为胶轮304,横向轮为能够横向滑动的组合轮306,胶轮304套设在第一车轮轴307上,组合轮306套设在第二车轮轴308上,传动组件包括第一同步带轮310、第二同步带轮309、以及套设在第一同步带轮310和第二同步带轮309上的同步带305,第一同步带轮310连接在行走驱动电机303的转轴上,第二同步带轮309连接在第一车轮轴307上,在第二车轮轴308上还套设有固定架311,固定架311还与对应位置的同步带305固定连接。
53.这样,当需要控制机器人移动时,行走驱动电机303转动,行走驱动电机303转动时通过其转轴带动第一同步带轮310转动,第一同步带轮310转动再通过同步带305带动第二同步带轮309转动,第二同步带轮309转动再进一步通过第一车轮轴307带动胶轮304转动,且同步带305转动还将通过固定架311和第二车轮轴308进一步带动组合轮306转动,当两侧行走驱动电机303的作用力相同时,胶轮304带动机器人实现前进或后退运动,当两侧行走驱动电机303的作用力不相同时,两侧行走驱动电机303的作用力差将会转化为组合轮306的横向力,组合轮306在该横向力的作用下将带动机器人本体1横向移动,由此本方案即实现了机器人的横向移动同时也实现了机器人的径向移动,以此更好的满足机器人的移动需求。
54.在本实施例中,骨架包括内骨架301和外骨架302,内骨架301与及机器人本体1固定连接,且行走驱动件固定连接在外骨架302上。
55.这样,通过将内骨架301连接在机器人本体1上,将行走驱动件安装在外骨架302上,以便实现通过骨架将行走机构3安装在机器人本体1上的目的。
56.在本实施例中,行走驱动电机303为直流无刷电机。
57.这样,直流无刷电机的使用成本底且使用性能稳定可靠。
58.最后需要说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制技术方案,本领域的普通技术人员应当理解,那些对本实用新型的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,均应涵盖在本实用新型的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1