扭力感测器及机器人的关节致动器的制作方法
1.本实用新型是有关于一种扭力感测器与致动器,且特别是扭力感测器及机器人的关节致动器。
背景技术:
2.工业机器人不仅可以克服恶劣环境对生产的影响并减少人工的使用,还能够提高生产效率,从而保证产品品质。随着工业机器人技术的不断发展,其不再只具有搬运重物的功能,而可进行各种高精度智能化的工作,如焊接、精密组装、研磨、开动等动作。
3.着眼于工业机器人的关节致动器,其特别重视机器人对于力的控制与回馈,因此在其中加入对应的扭力感测器或应变规等元件便成为不可避免的。但在现有的扭力感测器或应变规中,其结构刚性往往是与应变(扭力)感测能力互成对比,因此如何从中取得较佳效果,便成为本领域的技术人员所需思考的课题。
4.本“背景技术”只是用来帮助了解本
技术实现要素:
,因此在“背景技术”段落所揭露的内容可能包含一些没有构成所属技术领域中的技术人员所知道的已知技术。在“背景技术”段落所揭露的内容,不代表该内容或者本实用新型一个或多个实施例所要解决的问题,在本实用新型申请前已被所属技术领域中的技术人员所知晓或认知。
实用新型内容
5.本实用新型提供一种扭力感测器与机器人的关节致动器,其中扭力感测器以过负载结构而能分阶段承载扭矩,并据以提高结构刚性与感测精度。
6.本实用新型的扭力感测器,设置于关节致动器,用以感测关节致动器所产生或所接收的扭矩。扭力感测器包括内环、外环、多个幅状桥接部、多个过负载结构以及多个应变感测单元。内环与外环彼此同以轴线为中心设置且相互分离,扭矩使内环与外环以该轴线为基准产生相对旋转。幅状桥接部间隔设置且各幅状桥接部沿径向连接在内环与外环之间,每一个幅状桥接部具有至少一凹陷。过负载结构分别从内环沿径向朝向外环延伸,且每一个过负载结构与外环之间存在至少一间隙。应变感测单元分别设置于幅状桥接部。当扭矩小于预设值时,过负载结构与外环维持间隙,当扭矩大于或等于预设值时,过负载结构抵接至外环。
7.本实用新型的机器人的关节致动器,包括驱动装置、驱动轴、减速机与扭力感测器。驱动轴连接驱动装置,驱动装置用以驱动驱动轴转动。减速机包括动力输入件及动力输出件,分别套设于驱动轴,其中动力输入件配置于驱动轴与动力输出件之间。扭力感测器包括内环、外环、多个幅状桥接部、多个过负载结构与多个应变感测单元。内环与外环同以驱动轴的轴线为中心设置且相互分离,内环锁附至动力输出件。扭力感测器用以感测关节致动器所产生或所接收的扭矩,而使内环与外环以该轴线为基准产生相对旋转。幅状桥接部间隔设置且各幅状桥接部沿径向连接在内环与外环之间,每一个幅状桥接部具有至少一凹陷。过负载结构分别从内环沿径向朝向外环延伸,且每一个过负载结构与外环之间存在至
少一间隙。应变感测单元分别设置于幅状桥接部。当扭矩小于预设值时,过负载结构与外环维持间隙,当扭矩大于或等于预设值时,过负载结构抵接至外环。
8.基于上述,应用于机器人的关节致动器内的扭力感测器,其在内环与外环之间形成过负载结构,并使过负载结构从内环朝外环延伸并与外环存在至少一间隙,据以因应关节致动器所产生或接收的扭矩。进一步地说,过负载结构能让扭力感测器分阶段地承受不同扭矩,当扭矩小于预设值时,过负载结构与外环维持间隙,而当扭矩大于或等于预设值时,让过负载结构移动所述间隙而抵接至外环,以借由结构抵接而进一步地提高扭力感测器的整体结构刚性,并因此提高扭力感测器的感测范围与适用性。
附图说明
9.图1是本实用新型实施例的机器人的关节致动器的示意图。
10.图2是图1的关节致动器的剖视图。
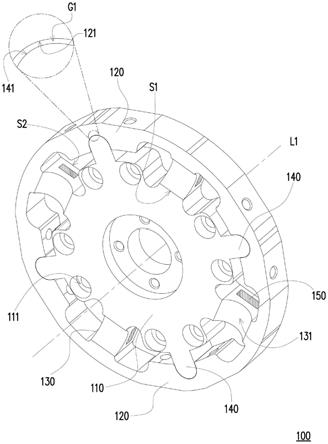
11.图3a是本实用新型的扭力感测器的示意图。
12.图3b是图3a的扭力感测器的幅状桥接部放大示意图。
13.图4是图3a的扭力感测器的前视图。
14.图5与图6绘示现有扭力感测器与本实施例扭力感测器的负载曲线示意图。
具体实施方式
15.有关本实用新型之前述及其他技术内容、特点与功效,在以下配合参考附图之一较佳实施例的详细说明中,将可清楚的呈现。以下实施例中所提到的方向用语,例如:上、下、左、右、前或后等,仅是参考附图的方向。因此,使用的方向用语是用来说明并非用来限制本实用新型。
16.图1是本实用新型实施例的机器人的关节致动器的示意图。图2是图1的关节致动器的剖视图。请同时参考图1与图2,在本实施例中,本实施例的关节致动器10包括驱动装置200、驱动轴300、减速机500、壳体400、双编码器700与扭力感测器100。驱动轴300连接驱动装置200,驱动装置200例如是无框马达,位于双编码器700及减速机500之间,驱动装置200用以驱动驱动轴300转动。驱动装置200、驱动轴300、减速机500与双编码器700设置于壳体400内。扭力感测器100的至少局部设置于壳体400内且连接减速机500,双编码器700连接驱动轴300。扭力感测器100、减速机500、驱动装置200及双编码器700沿一轴线依序套设于驱动轴300上。
17.减速机500包括动力输入件510及动力输出件520,分别套设于驱动轴300,动力输入件510例如是帽型柔轮,动力输出件520例如是刚轮,其中动力输入件510配置于驱动轴300与动力输出件520之间。扭力感测器100连接于动力输出件520。借由动力输入件510与动力输出件520之间的减速比可对驱动轴300进行减速。减速机500之有关达成所述减速比的具体结构设计为现有技术,于此不加以赘述。
18.此外,驱动轴300包括同轴设置的输入轴310及输出轴320,输入轴310套设于输出轴320外侧,驱动装置200例如是连接输入轴310,用以驱动输入轴310以轴线l1为中心轴转动。输入轴310的一端连接于减速机500的动力输入件510(相当于连接至驱动装置200),输出轴320的一端连接于动力输出件520。再者,由于扭力感测器100如上述连接于输出端的动
力输出件520(例如刚轮),而非连接于内部的动力输入件510,故扭力感测器100与减速机500相连接之结构设计可较为简化。
19.基于上述,本实施例的关节致动器10除了可利用扭力感测器100对关节致动器10的输出端进行力的感测,更可利用双编码器700对关节致动器10的输入端及输出端的位移进行感测,且因双边码器700与扭力感测器100相互耦接而可整合前述位移感测信号及力感测信号,以准确判断机器人的受力状态,进而准确地进行相应的高精度的动作。
20.再者,如图1所示,本实施例的机器人的机械手臂20包括连接件600,关节致动器10的扭力感测器100透过连接件600连接机器人的机器手臂20。据此,来自机器手臂20的外力透过连接件600而传递至扭力感测器100,以让本实施例的扭力感测器100也能据以感测对应于此外力的扭力。
21.图3a是本实用新型的扭力感测器的示意图。图3b是图3a的扭力感测器的幅状桥接部放大示意图。图4是图3a的扭力感测器的前视图。请同时参考图2至图4,在本实施例中,扭力感测器100是呈现单片盘形支架(monolithic disk-shaped mount),其包括内环110、外环120、多个幅状桥接部130、多个过负载结构140与多个应变感测单元150。内环110与外环120为两个相互分离的同心环且以驱动轴300的轴线l1为中心设置,内环110以锁附件p1搭配其锁附孔111而得以锁附至减速机500的动力输出件520。外环120则与机器人的机器手臂20连接。扭力感测器100用以感测关节致动器10所产生或所接收的扭矩,而使内环110与外环120以轴线l1为基准产生相对旋转。幅状桥接部130间隔地环绕驱动轴300的轴线设置,且各幅状桥接部130沿径向(背离驱动轴300及轴线l1)由内环110延伸至外环120,并连接在内环110与外环120之间。更详细的说明,各幅状桥接部130的两端分别连接在内环110与外环120。
22.每一个幅状桥接部130具有至少一凹陷131。过负载结构140分别从内环110沿径向朝向外环120延伸,且每一个过负载结构140与外环120之间存在至少一间隙g1。应变感测单元150分别设置于幅状桥接部130。当扭矩小于预设值时,过负载结构140与外环120维持间隙g1,当扭矩大于或等于预设值时,过负载结构140抵接至外环120。
23.进一步地说,由于内环110与外环120是以轴线l1为基准进行相对旋转(也可视为扭转),因此上述间隙g1实质上是存在于所述相对旋转的切线方向。需说明的是,本实施例的过负载结构140与内环110例如是一体结构,外环120具有对应过负载结构140之凹入部121,且各凹入部121为由外环120的内壁沿径向朝远离轴心方向凹入所形成,其中外环120的内壁朝向内环110。各过负载结构140具有沿径向朝远离轴心方向延伸的突出部141,过负载结构140的突出部141分别位于外环120的凹入部121内。在上述的内环120与外环110以轴线l1为基准产生相对旋转时,外环120的局部结构位于过负载结构140的移动路径上。换言之,本实施例的过负载结构140与外环120之间是以所述相对旋转而呈类互补轮廓,以利于在旋转时的切线方向能让彼此相互抵靠在一起。于其他实施例中,过负载结构140与内环110例如是两个独立结构,透过紧配、锁附或粘合等方式组合在一起,并使过负载结构140与外环120维持间隙g1。
24.再者,当扭矩超过预设值而使过负载结构140的突出部141抵接至外环120的凹入部121时,扭力感测器100在过负载结构140处的刚性大于在幅状桥接部130的刚性,据以让此状态的扭力感测器100是以过负载结构140抵接于外环120而形成用以承载主要扭矩的新
结构,因而得以提高扭力感测器100的负载能力与可靠度,并因此避免幅状桥接部130处的应变感测单元150因无法负载过大扭矩而失效。
25.另一方面,本实施例的各幅状桥接部130于轴线l1的方向上具有相对的第一表面s1及第二表面s2,其中凹陷131是位于第一表面s1或第二表面s2(本实施例的凹陷131是位于第一表面s1)。上述的凹陷131致使各幅状桥接部130具有沿轴线l1的最小厚度。此举让幅状桥接部130得以产生明显的应变,而有利于配置其上的应变感测单元150,并因此提升其感测灵敏度。更详细的说明,各应变感测单元150是相邻配置于凹陷131旁,例如各幅状桥接部130具有连接第一表面s1及第二表面s2的两侧面s3、s4(如图3b所示),则应变感测单元150是配置于两侧面s3、s4或两侧面的其中之一,且位于凹陷131旁。于本实施例中,各凹陷131位于其对应的幅状桥接部130的中央处。于其他实施例,凹陷也可以设置于其对应的幅状桥接部的非中央处,可例如设置于较靠近外环120或较靠近内环110。
26.当然,在另一未绘示的实施例但可参考本实施例的图2与图3,各幅状桥接部130于轴线l1的方向上具有相对的第一表面s1及第二表面s2,而各幅状桥接部130具有一对凹陷131,分别位于各幅状桥接部130的第一表面s1及第二表面s2。需说明的是,设计者可依据关节致动器10的出力需求或使用环境,而据以调整凹陷131的形状与程度(即幅状桥接部130沿轴线l1方向的厚度),以让扭力感测器100能兼具所需的结构刚性与感测能力。
27.图5与图6绘示现有扭力感测器与本实施例扭力感测器的负载曲线示意图,其中图5绘示现有扭力感测器,而图6绘示本实施例的扭力感测器100,附图中横轴代表所施加(或接收)的扭矩(单位n-m),而纵轴为所对应的扭矩对扭力感测器所产生的结构最大应力(单位mpa)。比较图5及图6可清楚得知,本实施例的扭力感测器100因存在过负载结构140,进而当扭矩大于或等于预设值(在此为118mpa)时,其仍有足够的结构刚性作为支撑,因此如图6所示,其在扭矩接近150nm时,所对应产生的结构应力尚为158mpa。反观图5,现有扭力感测器不存在过负载结构140,故而同样在扭矩接近150nm时,已能对其产生高达298mpa的结构应力。由此可明显得知本实施例采用过负载结构140所产生的效果。
28.综上所述,在本实用新型的上述实施例中,应用于机器人的关节致动器内的扭力感测器,其在内环与外环之间形成过负载结构,并使过负载结构从内环朝外环延伸并与外环存在至少一间隙,据以因应关节致动器所产生或接收的扭矩。
29.在实施例中,过负载结构是从内环延伸出的突出部,而外环具有对应的凹陷,因而当内环与外环产生相对旋转时,突出部与凹陷会在切线方向产生抵接。进一步地说,过负载结构能让扭力感测器分阶段地承受不同扭矩,当扭矩小于预设值时,过负载结构与外环维持间隙,而当扭矩大于或等于预设值时,让过负载结构移动所述间隙而抵接至外环,据以让此时的扭矩能平均分布于内环与外环。
30.如此,对于幅状桥接部而言,也正因上述扭矩超出预设值时是由过负载结构作为承载主要扭矩之用,因此设置在幅状桥接部上的应变感测单元得以顺利地量测幅状桥接部的应变,而毋须担心负载过大而造成失效。
31.上述特性使本实用新型的扭力感测器将能进一步地提高整体结构刚性、感测能力与适用性。
32.惟以上所述者,仅为本实用新型之较佳实施例而已,当不能以此限定本实用新型实施之范围,即凡依本实用新型权利要求书及实用新型内容所作之简单的等效变化与修
改,皆仍属本实用新型专利涵盖之范围内。另外本实用新型的任一实施例或权利要求不须达成本实用新型所揭露之全部目的或优点或特点。此外,摘要和标题(实用新型名称)仅是用来辅助专利文件检索之用,并非用来限制本实用新型之权利范围。此外,本说明书或权利要求书中提及的“第一”、“第二”等用语仅用以命名元件(element)的名称或区别不同实施例或范围,而并非用来限制元件数量上的上限或下限。
33.虽然本实用新型已以实施例揭露如上,然其并非用以限定本实用新型,任何所属技术领域中的技术人员,在不脱离本实用新型的精神和范围内,当可作些许的更动与润饰,故本实用新型的保护范围当视后附的权利要求书所界定者为准。
34.附图标记说明:
35.10:关节致动器
36.20:机器手臂
37.100:扭力感测器
38.110:内环
39.111:锁附孔
40.120:外环
41.121:凹入部
42.130:幅状桥接部
43.131:凹陷
44.140:过负载结构
45.141:突出部
46.150:应变感测单元
47.200:驱动装置
48.300:驱动轴
49.310:输入轴
50.320:输出轴
51.400:壳体
52.500:减速机
53.510:动力输入件
54.520:动力输出件
55.600:连接件
56.700:双编码器
57.g1:间隙
58.l1:轴线
59.p1:锁附件
60.s1:第一表面
61.s2:第二表面
62.s3、s4:侧面。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1