一种应用于机器人的多关节夹持机构的制作方法
:
1.本实用新型涉及机器人技术领域,具体地说涉及一种应用于机器人的多关节夹持机构。
背景技术:
2.在电线杆塔、化工管道等管线或杆件检修时,需要用到爬杆机器人,通过爬杆机器人搭载相应的检测设备进行相关检测。其中夹持机构是爬杆机器人的关键设备,用于夹紧杆塔或管道,通过夹持机构和机器臂配合实现爬杆过程。但是,现有的爬杆机器人的夹持机构通常包括与机械臂铰接的夹持臂,通过伸缩杆控制夹持臂的开合。但是,由于夹持臂的结构固定,在攀爬不同直径的杆塔或管道时匹配度差,导致夹持不牢固,意外掉落的风险大,导致这类机器人的适用范围有限。
技术实现要素:
3.本实用新型的目的在于提供一种应用于机器人的多关节夹持机构,解决适用范围有限的问题。
4.本实用新型由如下技术方案实施:一种应用于机器人的多关节夹持机构,其包括连接座和对称设置在所述连接座两侧的两个弧形臂,每个所述弧形臂均包括驱动舵机、关节舵机和若干弧形关节,在所述弧形臂的后端设有所述驱动舵机,在所述驱动舵机到所述弧形臂的前端之间设有若干所述关节舵机;在所述驱动舵机和相邻的所述关节舵机之间,相邻的所述关节舵机之间,以及最前端的所述关节舵机的前端均设有所述弧形关节;所述驱动舵机的壳体与所述连接座固定连接,所述驱动舵机的输出轴与相邻的所述弧形关节的固定;每个所述关节舵机的壳体均与其后端相邻的所述弧形关节固定,每个所述关节舵机的输出轴均与其前端相邻的所述弧形关节固定。
5.进一步的,所述驱动舵机和所述关节舵机均包括两根竖直设置的输出轴,所述弧形关节均包括上连接板和下连接板,所述上连接板和所述下连接板的后端均与对应的所述驱动舵机的两根输出轴或所述关节舵机的两根输出轴对应设置;在所述弧形臂前端的所述弧形关节的所述上连接板和所述下连接板之间固定有连接件。
6.进一步的,在对应的所述上连接板和所述下连接板的中部之间转动设有沿所述弧形臂轴向设置的滚筒,所述滚筒的直径大于所述上连接板和所述下连接板的宽度;在所述上连接板的顶端或所述下连接板的底端固定有驱动所述滚筒转动的旋转驱动。
7.进一步的,所述旋转驱动为电机。
8.本实用新型的优点:通过各个关节舵机可以调节整个弧形臂弧度,可以提高夹持机构与不同直径杆塔或管道的匹配度,夹持更加牢固,适用范围广。并且,通过旋转驱动来驱动滚筒转动,可以使夹持机构整体绕着杆塔或管道转动,以调整两者之间的相对位置,适用于不同工况。
附图说明:
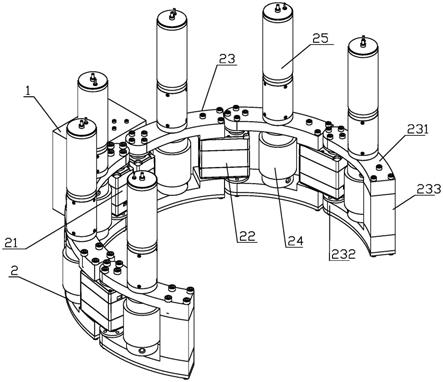
9.图1为实施例1的整体结构示意图。
10.图2为实施例2的整体结构示意图。
11.连接座1、弧形臂2、驱动舵机21、关节舵机22、弧形关节23、上连接板231、下连接板232、连接件233、滚筒24、旋转驱动25。
具体实施方式:
12.在本实用新型的描述中,需要说明的是,如出现术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等,其指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,如出现术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
13.实施例1:如图1所示,一种应用于机器人的多关节夹持机构,其包括连接座1和对称设置在连接座1两侧的两个弧形臂2,连接座1用于与机械臂或机器人的机身连接;每个弧形臂2均包括驱动舵机21、关节舵机22和若干弧形关节23,在弧形臂2的后端设有驱动舵机21,在驱动舵机21到弧形臂2的前端之间设有若干关节舵机22;在驱动舵机21和相邻的关节舵机22之间,相邻的关节舵机22之间,以及最前端的关节舵机22的前端均设有弧形关节23;驱动舵机21的壳体与连接座1固定连接,通过两个弧形臂2的驱动舵机21可以驱动两侧弧形臂2张开或者夹紧,实现控制夹持机构的开合。驱动舵机21的输出轴与相邻的弧形关节23的固定;每个关节舵机22的壳体均与其后端相邻的弧形关节23固定,每个关节舵机22的输出轴均与其前端相邻的弧形关节23固定;通过各个关节舵机22可以控制与其连接的弧形关节23绕着其输出轴转动,进而使弧形臂2整体的弧度可以与不同直径的杆塔或管道相匹配,使得夹持机构的夹持更加稳定,进而可以增大其适用范围。
14.优选的,驱动舵机21和关节舵机22均包括上下两根竖直设置的输出轴,弧形关节23均包括上连接板231和下连接板232,上连接板231和下连接板232的后端均与对应的驱动舵机21的两根输出轴或关节舵机22的两根输出轴对应设置;在弧形臂2前端的弧形关节23的上连接板231和下连接板232之间固定有连接件233。即驱动舵机21与相邻的关节舵机22之间,以及相邻的关节舵机22之间均通过上下连接板连接,使得连接更加稳定。
15.实施例2:其整体结构与实施例1相同,不同之处在于,如图2所示,在对应的上连接板231和下连接板232的中部之间转动设有沿弧形臂2轴向设置的滚筒24,滚筒24的直径大于上连接板231和下连接板232的宽度;在上连接板231的顶端或下连接板232的底端固定有驱动滚筒24转动的旋转驱动25,旋转驱动25为电机。通过旋转驱动25可以驱动滚筒24转动,进而带动夹持机构绕着杆塔或管道转动,以实现根据不同的作业空间来调整机器人姿态的目的,使得机器人的移动更加灵活,进一步提高其适用范围;具体的,以化工厂为例,不同的反应器、罐体之间会连接各种管道,这些管道交错布置,会存在管道一侧空间小,机器人无法通过的情况,此时,只需要启动旋转驱动25使驱动滚筒24转动,即可在使夹持机构整体在夹持的同时可绕着杆塔或管道转动,使两个弧形臂2的前端位于空间狭小处即可。
16.最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限
制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
技术特征:
1.一种应用于机器人的多关节夹持机构,其特征在于,其包括连接座和对称设置在所述连接座两侧的两个弧形臂,每个所述弧形臂均包括驱动舵机、关节舵机和若干弧形关节,在所述弧形臂的后端设有所述驱动舵机,在所述驱动舵机到所述弧形臂的前端之间设有若干所述关节舵机;在所述驱动舵机和相邻的所述关节舵机之间,相邻的所述关节舵机之间,以及最前端的所述关节舵机的前端均设有所述弧形关节;所述驱动舵机的壳体与所述连接座固定连接,所述驱动舵机的输出轴与相邻的所述弧形关节的固定;每个所述关节舵机的壳体均与其后端相邻的所述弧形关节固定,每个所述关节舵机的输出轴均与其前端相邻的所述弧形关节固定。2.根据权利要求1所述的一种应用于机器人的多关节夹持机构,其特征在于,所述驱动舵机和所述关节舵机均包括两根竖直设置的输出轴,所述弧形关节均包括上连接板和下连接板,所述上连接板和所述下连接板的后端均与对应的所述驱动舵机的两根输出轴或所述关节舵机的两根输出轴对应设置;在所述弧形臂前端的所述弧形关节的所述上连接板和所述下连接板之间固定有连接件。3.根据权利要求2所述的一种应用于机器人的多关节夹持机构,其特征在于,在对应的所述上连接板和所述下连接板的中部之间转动设有沿所述弧形臂轴向设置的滚筒,所述滚筒的直径大于所述上连接板和所述下连接板的宽度;在所述上连接板的顶端或所述下连接板的底端固定有驱动所述滚筒转动的旋转驱动。4.根据权利要求3所述的一种应用于机器人的多关节夹持机构,其特征在于,所述旋转驱动为电机。
技术总结
本实用新型公开了一种应用于机器人的多关节夹持机构,其包括连接座和对称设置在连接座两侧的两个弧形臂,每个弧形臂均包括驱动舵机、关节舵机和若干弧形关节。优点:通过各个关节舵机可以调节整个弧形臂弧度,可以提高夹持机构与不同直径杆塔或管道的匹配度,夹持更加牢固,适用范围广。并且,通过旋转驱动来驱动滚筒转动,可以使夹持机构整体绕着杆塔或管道转动,以调整两者之间的相对位置,适用于不同工况。况。况。
技术研发人员:金生祥 张奇 付喜亮 孟浩 赵凯 李俊 何川 张宏元 尹禹超 刘峰 范晓英 孙立德 方小文 殷丽梅 安福旺 樊景星 吉力特 温齐 吴龙 白振华
受保护的技术使用者:北京京能电力股份有限公司
技术研发日:2021.08.30
技术公布日:2022/2/7
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1