一种自动抓取机械手的制作方法
1.本实用新型涉及机械技术领域,特别涉及一种抓取机械手。
背景技术:
2.在机械自动化加工生产过程中经常涉及到对产品的抓取,一般采用的就是抓取机械手或者吸盘式机械手,前者多是采用夹紧力将产品夹紧,该方式应用非常广泛,但在某些情况下,夹持效果不够理想,夹爪的夹持力和夹持面的大小不能适应性自动调节,比如用于抓取冰激凌或者甜筒时,用力过大会损坏产品,用力过小又夹不住。
3.本实用新型的目的就是提供一种能够克服上述缺陷的自动抓取机械手。
技术实现要素:
4.本实用新型主要解决的技术问题是提供一种自动抓取机械手,通过驱动机构驱动两抓取臂向相反的方向旋转,从而带动两抓取组件靠近或远离,进而实现对产品的抓紧或松开,且通过采用弹性抓取组件使得抓取物品的过程中两抓取组件之间的抓取力和两抓取组件的抓取面能够根据物品的形状自动调整,提高抓取过程的稳定性和对产品的适应性。
5.为解决上述技术问题,本实用新型采用的一个技术方案是:提供一种自动抓取机械手,包括基座、两抓取臂和驱动两抓取臂旋转的驱动机构,所述驱动机构安装于所述基座,每一所述抓取臂的一端分别与所述基座转动连接,且另一端皆设有抓取组件;
6.所述抓取组件为弹性抓取组件;
7.通过所述驱动机构驱动两所述抓取臂向相反的方向旋转,从而带动两所述抓取组件靠近或远离,进而实现对产品的抓紧或松开。
8.为解决上述技术问题,本实用新型采用的一个技术方案是:定义抓取组件所在的一侧为上,每一所述抓取组件皆包括两安装轴和一弹性圈,所述安装轴位于所述抓取臂的上端,所述弹性圈套装于两所述安装轴;
9.通过两所述抓取组件的弹性圈的表面对产品的表面形成作用力实现对产品的抓取。
10.进一步地说,所述抓取臂的上端为向外侧凹的弧面,其中一安装轴位于所述弧面的上端,且另一安装轴位于所述弧面的下端。
11.进一步地说,所述驱动机构包括舵机、一主动轮、一从动轮a和两从动轮b,所述舵机的输出端与所述主动轮连接,所述主动轮与一所述从动轮b啮合,所述从动轮a与另一所述从动轮b啮合;
12.其中一所述抓取臂的前后端分别与主动轮和从动轮a连接,另一所述抓取臂的前后端分别与两所述从动轮b连接。
13.进一步地说,所述弹性圈为橡胶圈。
14.进一步地说,每一所述抓取臂皆包括连接臂和抓取手指,所述连接臂的一端与所述基座转动连接,且另一端与所述抓取手指的一端连接,所述抓取手指的另一端设有所述
抓取组件。
15.进一步地说,所述产品为筒状物,所述筒状物为圆柱状物或圆锥状物。
16.本实用新型的有益效果是:
17.本实用新型通过驱动机构驱动两抓取臂向相反的方向旋转并靠近,从而带动两抓取组件靠近,进而实现对筒状物的抓紧,且通过采用弹性抓取组件使得抓取产品的过程中两抓取组件之间的抓取力和两抓取组件的抓取面能够根据产品的形状自动调整,提高抓取过程的稳定性和对产品的适应性;
18.再者,本实用新型的每一所述抓取组件皆包括两安装轴和一弹性圈,弹性圈套装于两安装轴,此时弹性圈是被两安装轴拉紧,弹性圈具有一定的预张力,并通过两抓取组件的弹性圈的表面对产品的表面形成作用力实现对产品的抓取;由于弹性圈本身的弹性,一是,在抓取产品的过程中,既能将产品夹紧,又不会对产品的表面造成夹伤、划痕等外观缺陷;二是,抓取面能够根据产品的形状自动调整,不仅能实现圆柱状物的抓取,还能实现圆锥状物(比如冰激凌筒、锥形甜筒)的抓取。
19.上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以下以本实用新型的较佳实施例并配合附图详细说明如后。
附图说明
20.图1是本实用新型的外观图;
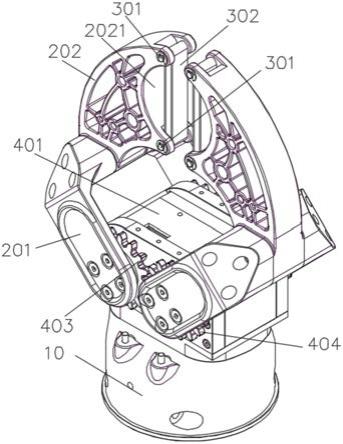
21.图2是本实用新型的结构示意图;
22.图3是本实用新型的主视图;
23.图4是本实用新型的俯视图;
24.附图中各部分标记如下:
25.基座10、基座壳101、抓取臂20、连接臂201、抓取手指202、弧面2021、抓取组件30、安装轴301、弹性圈302、舵机401、主动轮402、从动轮a 403、从动轮b 404。
具体实施方式
26.以下通过特定的具体实施例说明本实用新型的具体实施方式,本领域技术人员可由本说明书所揭示的内容轻易地了解本实用新型的优点及功效。本实用新型也可以其它不同的方式予以实施,即,在不背离本实用新型所揭示的范畴下,能予不同的修饰与改变。
27.实施例:一种自动抓取机械手,如图1到图4所示,包括基座10、两抓取臂20和驱动两抓取臂旋转的驱动机构,所述驱动机构安装于所述基座,每一所述抓取臂的一端分别与所述基座转动连接,且另一端皆设有抓取组件30;
28.所述抓取组件为弹性抓取组件,所述弹性抓取组件指抓取筒状物的过程中两抓取组件之间的抓取力和两抓取组件的抓取面能够根据筒状物的形状自动调整;
29.通过所述驱动机构驱动两所述抓取臂向相反的方向旋转,从而带动两所述抓取组件靠近或远离,进而实现对产品的抓紧或松开。
30.本实施例中,所述基座的外面安装有基座壳101。
31.定义抓取组件所在的一侧为上,每一所述抓取组件皆包括两安装轴301和一弹性
圈302,所述安装轴位于所述抓取臂的上端,所述弹性圈套装于两所述安装轴;
32.通过两所述抓取组件的弹性圈的表面对产品的表面形成作用力实现对产品的抓取。
33.本实施例中,所述抓取臂的上端为向外侧凹的弧面2021,其中一安装轴位于所述弧面的上端,且另一安装轴位于所述弧面的下端。
34.所述驱动机构包括舵机401、一主动轮402、一从动轮a 403和两从动轮b 404,所述舵机的输出端与所述主动轮连接,所述主动轮与一所述从动轮b啮合,所述从动轮a与另一所述从动轮b啮合;
35.其中一所述抓取臂的前后端分别与主动轮和从动轮a连接,另一所述抓取臂的前后端分别与两所述从动轮b连接。本实施例中,所述舵机主要包括电机和减速器,为常规的动力提供单元,故不赘述。
36.所述弹性圈为橡胶圈,但不限于此。
37.本实施例中,每一所述抓取臂皆包括连接臂201和抓取手指202,所述连接臂与所述抓取手指为一体连接或分体连接,所述连接臂的一端与所述基座转动连接,且另一端与所述抓取手指的一端连接,所述抓取手指的另一端设有所述抓取组件。
38.本实施例中,较佳的是,所述产品为筒状物,所述筒状物为圆柱状物或圆锥状物。前者比如笔筒,后者比如冰激凌。
39.本实用新型的工作原理和工作过程:
40.下面以待抓取的产品是筒状物为例进行说明:启动机械手,舵机驱动主动轮旋转,通过主动轮与一从动轮b啮合,以及从动轮a与另一从动轮b啮合,驱动两抓取臂向相反的方向旋转并靠近,从而带动两抓取组件靠近,进而实现对筒状物的抓紧,具体是:通过两抓取组件的弹性圈的表面对筒状物的表面形成作用力(即摩擦力)实现对筒状物的夹紧式抓取;
41.同理,两抓取臂向相反的方向旋转并远离,从而带动两抓取组件远离,进而实现对筒状物的松开。
42.以上所述仅为本实用新型的实施例,并非因此以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1