一种新型机器人夹爪装配机构的制作方法
1.本实用新型涉及一种自动化装配机构,具体涉及一种新型机器人夹爪装配机构。
背景技术:
2.在自动化生产装配环节中,经常需要机器人来完成各种产品的自动化装配,以弥补人工装配的工作效率和装配一致性的缺陷。而目前的机器人设备定制化程度高,想要更改配置适应不同的场合难度大,操作复杂。
3.为了解决上述问题,我们做出了一系列改进。
技术实现要素:
4.本实用新型的目的在于,提供一种新型机器人夹爪装配机构,以克服现有技术所存在的上述缺点和不足。
5.一种新型机器人夹爪装配机构,包括:电气机械结构、气动夹爪模块和架体,所述电气机械结构与架体上端连接,所述气动夹爪模块与架体下端连接,所述电气机械结构与气动夹爪模块连接,所述电气机械结构与机器人连接,所述气动夹爪模块下方设有夹爪放置架;
6.其中,所述气动夹爪模块包括:气动夹爪、推压气缸、直线滑轨、推压滚轮、卡扣和光纤传感器,所述气动夹爪与架体下端连接,所述推压气缸与架体内侧连接,所述推压气缸与电气机械结构和气动夹爪连接,所述直线滑轨与推压滚轮连接,所述推压滚轮与气动夹爪连接,所述卡扣与气动夹爪下端和推压气缸连接,所述光纤传感器与架体底部连接。
7.进一步,所述电气机械结构包括:快换机构、能源模块、工具存储支撑杆和电气io模,所述快换机构与工具存储支撑杆上端连接,所述能源模块与快换机构连接,所述工具存储支撑杆与架体上部连接,所述电气io模穿过架体与工具存储支撑杆连接。
8.本实用新型的有益效果:
9.本实用新型与传统技术相比,通过机械结构、标准电气和气动模块的组合,达到快速换型以及自动化装配成型,大大提高了工作效率,结构紧凑,使用方便,适用性强。
附图说明:
10.图1为本实用新型的装配操作的结构示意图。
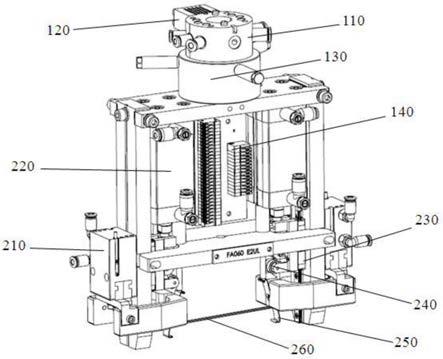
11.图2为本实用新型的结构示意图。
12.附图标记:
13.电气机械结构100、快换机构110、能源模块120、工具存储支撑杆130和电气io模140。
14.气动夹爪模块200、气动夹爪210、推压气缸220、直线滑轨230、推压滚轮240、卡扣250和光纤传感器260。
15.架体300、机器人400和夹爪放置架500。
具体实施方式
16.以下结合具体实施例,对本实用新型作进步说明。应理解,以下实施例仅用于说明本实用新型而非用于限定本实用新型的范围。
17.实施例1
18.图1为本实用新型的装配操作的结构示意图。图2为本实用新型的结构示意图。
19.如图1~2所示,一种新型机器人夹爪装配机构,包括:电气机械结构100、气动夹爪模块200和架体300,电气机械结构100与架体300上端连接,气动夹爪模块200与架体300下端连接,电气机械结构100与气动夹爪模块200连接,电气机械结构100与机器人400连接,气动夹爪模块200下方设有夹爪放置架500。其中,机器人400为传统技术,直接采购,因此其结构和原理就不多赘述。
20.其中,气动夹爪模块200包括:气动夹爪210、推压气缸220、直线滑轨230、推压滚轮240、卡扣250和光纤传感器260,气动夹爪210与架体300下端连接,推压气缸220与架体300内侧连接,推压气缸220与电气机械结构100和气动夹爪210连接,直线滑轨230与推压滚轮240连接,推压滚轮240与气动夹爪210连接,卡扣250与气动夹爪210下端和推压气缸220连接,光纤传感器260与架体300底部连接。
21.电气机械结构100包括:快换机构110、能源模块120、工具存储支撑杆130和电气io模140,快换机构110与工具存储支撑杆130上端连接,能源模块120与快换机构110连接,工具存储支撑杆130与架体300上部连接,电气io模140穿过架体300与工具存储支撑杆130连接。
22.本实用新型的工作原理是,自动更换夹爪流程:机器人400移动至夹爪放置架,通过电磁阀切换,解锁,当前夹爪落于该放置架,机器人400移动至需要夹爪位置,切换电磁阀,锁定,新夹爪便会安装于机器人400法兰上。
23.装配生产流程,机器人400将夹爪机构移动至取料位置,气动夹爪210夹紧,取第一个卡扣250,机器人400提升,旋转180度,再下到取料位置,气动夹爪210夹紧,取第二个卡扣250,机器人400移动至需要装配的产品上方,两个气动夹爪210打开,两个卡扣250会落在产品槽内,推压气缸220会带着推压滚轮240,从上至下推动卡扣250,让两个卡扣250向中间挤压,直至装配到位,机器人400提升,回到初始位置,往复循环。本实用新型通过机械结构、标准电气和气动模块的组合,达到快速换型以及自动化装配成型,大大提高了工作效率,结构紧凑,使用方便,适用性强。
24.以上对本实用新型的具体实施方式进行了说明,但本实用新型并不以此为限,只要不脱离本实用新型的宗旨,本实用新型还可以有各种变化。
技术特征:
1.一种新型机器人夹爪装配机构,其特征在于,包括:电气机械结构(100)、气动夹爪模块(200)和架体(300),所述电气机械结构(100)与架体(300)上端连接,所述气动夹爪模块(200)与架体(300)下端连接,所述电气机械结构(100)与气动夹爪模块(200)连接,所述电气机械结构(100)与机器人(400)连接,所述气动夹爪模块(200)下方设有夹爪放置架(500);其中,所述气动夹爪模块(200)包括:气动夹爪(210)、推压气缸(220)、直线滑轨(230)、推压滚轮(240)、卡扣(250)和光纤传感器(260),所述气动夹爪(210)与架体(300)下端连接,所述推压气缸(220)与架体(300)内侧连接,所述推压气缸(220)与电气机械结构(100)和气动夹爪(210)连接,所述直线滑轨(230)与推压滚轮(240)连接,所述推压滚轮(240)与气动夹爪(210)连接,所述卡扣(250)与气动夹爪(210)下端和推压气缸(220)连接,所述光纤传感器(260)与架体(300)底部连接。2.根据权利要求1所述的一种新型机器人夹爪装配机构,其特征在于:所述电气机械结构(100)包括:快换机构(110)、能源模块(120)、工具存储支撑杆(130)和电气io模(140),所述快换机构(110)与工具存储支撑杆(130)上端连接,所述能源模块(120)与快换机构(110)连接,所述工具存储支撑杆(130)与架体(300)上部连接,所述电气io模(140)穿过架体(300)与工具存储支撑杆(130)连接。
技术总结
一种新型机器人夹爪装配机构,包括:电气机械结构、气动夹爪模块和架体,电气机械结构与架体上端连接,气动夹爪模块与架体下端连接,电气机械结构与气动夹爪模块连接,电气机械结构与机器人连接,气动夹爪模块下方设有夹爪放置架。其中,气动夹爪模块包括:气动夹爪、推压气缸、直线滑轨、推压滚轮、卡扣和光纤传感器。本实用新型与传统技术相比,通过机械结构、标准电气和气动模块的组合,达到快速换型以及自动化装配成型,大大提高了工作效率,结构紧凑,使用方便,适用性强。适用性强。适用性强。
技术研发人员:尤龙 王文戈
受保护的技术使用者:艾谱特工业自动化(上海)有限公司
技术研发日:2021.09.28
技术公布日:2022/3/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1