一种用于铜排加工的机械臂装置的制作方法
1.本实用新型涉及铜排加工技术领域,特别是一种用于铜排加工的机械臂装置。
背景技术:
2.铜排一般指铜母线,铜母线是制造电机绕组、高低压电器、开关触头,以及供配电安装用导线等不可缺少的导电材料。铜母线是铜加工材中的一个主要品种。铜母线具有较高的机械性能,良好的导电性、导热性,优良的抗腐蚀性、电镀性、钎焊性,美观漂亮的金属光泽及良好的成形加工性能等,因此用它制作的各种输变电、电器装备等在电力领域得到了广泛的应用。近年来随着国民经济的持续高速发展,我国铜母线产量和消费量也大幅度提高,同时对铜母线的质量要求也在不断提高。
3.目前的铜排的加工流水线主要由铜排移栽机、数控剪切机、数控加工中心、铜排拉丝专机和数控母线折弯机等设备组成。铜排经过剪切、加工和拉丝工序后,铜排另一面需要人工手动反面继续进行拉丝工序,铜排两面拉丝完成后,铜排集中放置在铜排拉丝专机旁,由人工将铜排移动到数控母线折弯机进行下一步骤。人工操作铜排反面需要时刻保持专注,而人工将铜排移动到数控母线折弯机一般是积累了一定数量的铜排才进行操作的,这样会导致数控母线折弯机存在工作空窗期。因此,目前的铜排加工方法人工劳动成本高,生产效率低,而且操作人员需要保持高度的专注度,容易出错。所以,一种具有自动化、安全的装置用于铜排加工是非常有必要的。
技术实现要素:
4.为了克服现有技术的上述缺点,本实用新型的目的是提供一种用于铜排加工的机械臂装置,以解决上述背景技术提出的问题。
5.本实用新型解决其技术问题所采用的技术方案是:一种用于铜排加工的机械臂装置,包括底座、连接块、机械臂和夹具机构,所述底座设于连接块底部,所述机械臂一端与连接块连接,所述机械臂另一端与夹具机构连接,所述机械臂包括第一机械臂和第二机械臂,所述第一机械臂一端与第二机械臂一端通过第二转动轴铰接连接,所述第二转动轴与第二转动轴伺服电机连接,所述夹具机构一端设有转动头,所述夹具机构另一端设有夹爪和视觉感应器。
6.作为本实用新型的进一步改进:所述连接块与底座之间设有旋转机构,所述旋转机构与旋转机构伺服电机连接。
7.作为本实用新型的进一步改进:所述连接块与第一机械臂另一端铰接连接,所述连接块与第一机械臂之间设有第一转动轴,所述第一转动轴与第一转动轴伺服电机连接。
8.作为本实用新型的进一步改进:所述第二机械臂另一端与夹具机构连接,所述第二机械臂与夹具机构之间设有第三转动轴。
9.作为本实用新型的进一步改进:所述夹具机构包括夹具块和转动头,所述夹具块一侧设有若干夹爪,所述夹具块一侧装有视觉感应器,所述夹具块另一侧与转动头连接,所
述转动头与第三转动轴连接。
10.作为本实用新型的进一步改进:所述夹爪设于夹具块两侧,所述夹爪包括上夹爪和下夹爪,所述上夹爪与下夹爪的接触端为平整面,所述接触端设有防滑层,所述防滑层为防滑涂料,所述夹爪嵌于夹具块的滑动槽内。
11.作为本实用新型的进一步改进:所述机械臂装置一侧设有铜排拉丝专机,所述机械臂装置另一侧分设有数控母线折弯机,所述铜排拉丝专机与数控母线折弯机设置在机械臂装置的机械臂摆动范围内。
12.作为本实用新型的进一步改进:所述机械臂还设有第三转动轴伺服电机、转动头伺服电机和夹爪伺服电机。
13.作为本实用新型的进一步改进:所述机械臂装置设有电源装置,所述机械臂装置与plc总控连接。
14.作为本实用新型的进一步改进:所述底座为法兰底座。
15.作为本实用新型的进一步改进:所述视觉感应器为距离传感器,所述距离传感器用于感应测量夹爪与铜排的距离。
16.与现有技术相比,本实用新型的有益效果是:通过使用该铜排加工机械臂装置,实现铜排夹取、翻转和转移自动化操作,解决了需要人工操作导致工作效率低,出错率高的问题,由于是自动化操作,能够减少人工劳动成本,提高企业效益。
附图说明
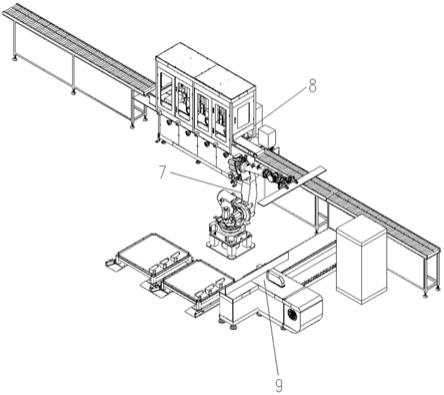
17.图1为本实用新型的位置示意图;
18.图2为本实用新型的结构示意图;
19.图3为夹具机构的结构示意图。
具体实施方式
20.现结合附图说明与实施例对本实用新型进一步说明:如图1、图2和图3所示,一种用于铜排加工的机械臂装置,包括底座1、连接块2、机械臂3和夹具机构4,所述底座1设于连接块2底部,所述机械臂3一端与连接块2连接,所述机械臂3另一端与夹具机构4连接,所述机械臂3包括第一机械臂31和第二机械臂32,所述第一机械臂31一端与第二机械臂32一端通过第二转动轴52铰接连接,所述第二转动轴52与第二转动轴伺服电机62连接,所述第二转动轴伺服电机62用于控制第二机械臂32以第二转动轴52为轴心转动,所述夹具机构4一端设有转动头42,所述夹具机构4另一端设有夹爪43和视觉感应器44。
21.所述连接块2与底座1之间设有旋转机构5,所述旋转机构5与旋转机构伺服电机6连接,所述旋转机构伺服电机6用于控制连接块2在旋转机构5上转动。
22.所述连接块2与第一机械臂31另一端铰接连接,所述连接块2与第一机械臂31之间设有第一转动轴51,所述第一转动轴51与第一转动轴伺服电机61连接,所述第一转动轴伺服电机61用于控制第一机械臂31以第一转动轴51为轴心转动。
23.所述第二机械臂32另一端与夹具机构4连接,所述第二机械臂32与夹具机构4之间设有第三转动轴53。
24.所述夹具机构4包括夹具块41和转动头42,所述夹具块41一侧设有若干夹爪43,所
述夹具块41一侧装有视觉感应器44,所述夹具块41另一侧与转动头42连接,所述转动头42与第三转动轴53连接。
25.所述夹爪43设于夹具块41两侧,所述夹爪43包括上夹爪431和下夹爪432,所述上夹爪431与下夹爪432的接触端46为平整面,所述接触端46设有防滑层,所述防滑层为防滑涂料,所述夹爪43嵌于夹具块41的滑动槽45内。
26.所述机械臂装置7一侧设有铜排拉丝专机8,所述机械臂装置7另一侧分设有数控母线折弯机9,所述铜排拉丝专机8与数控母线折弯机9设置在机械臂装置7的机械臂3摆动范围内。
27.所述机械臂3还设有第三转动轴伺服电机63、转动头伺服电机64和夹爪伺服电机65,所述第三转动轴伺服电机63用于控制夹具机构4以第三转动轴53为轴心上下摆动,所述转动头伺服电机64用于控制转动头42旋转,所述转动头42带动夹具块41旋转,所述夹爪伺服电机65用于控制夹爪43离合。
28.所述机械臂装置7设有电源装置,所述机械臂装置7与plc总控连接。
29.所述底座1为法兰底座,所述法兰底座固定在地面上或安装固定在其他装置上。
30.所述视觉感应器41为距离传感器,所述距离传感器用于感应测量夹爪43与铜排的距离。
31.本实用新型的工作原理:铜排经过剪断和加工后,送至铜排拉丝专机8进行拉丝,铜排一侧拉丝完成后,本机械臂装置7将机械臂3和夹具机构4转动至铜排拉丝专机8这一侧,通过夹具机构4上的视觉感应器44感应铜排的位置,夹爪43夹取铜排,转动头42旋转,将铜排进行翻面操作,铜排拉丝专机8将铜排另一面进行拉丝。拉丝完成后,机械臂装置7的夹爪43将铜排夹紧,旋转机构5转动,机械臂3和夹具机构4转动至数控母线折弯机9一侧,夹爪43松开铜排,数控母线折弯机9将铜排进行折弯处理,最后通过视觉感应器44感应铜排位置,夹爪43将铜排重新夹取,旋转机构5转动,机械臂装置7将铜排加工成品放置于成品料框内。
32.本实用新型的主要功能:通过使用该铜排加工机械臂装置,实现铜排夹取、翻转和转移自动化操作,解决了需要人工操作导致工作效率低,出错率高的问题,由于是自动化操作,能够减少人工劳动成本,提高企业效益。
33.综上所述,本领域的普通技术人员阅读本实用新型文件后,根据本实用新型的技术方案和技术构思无需创造性脑力劳动而作出其他各种相应的变换方案,均属于本实用新型所保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1