一种基于超声波定位软体机器人气动控制系统
1.本实用新型属于机器人领域,尤其是一种基于超声波定位软体机器人气动控制系统。
背景技术:
2.城市中的排水管道是汇集和排放污水、废水和雨水的管渠及其附属设施所组成的系统,包括干管、支管以及通往处理厂的管道,遍布于街道上或其它任何地方,一般来讲,常见的主下水管一般采用的尺寸为90mm、110mm,地漏下水管一般采用的尺寸:50mm,可以明显看出,这些尺寸并不能够使人很好地在管道中完成工作,并且城市排水管道中含有大量异物,也极大的阻碍了人在管道中的探测工作。这时,只能“派遣”机器人进入管道中完成相应工作。
3.管道机器人是一种可以搭载传感器和相关作业工具,并自行在管道内部或外部移动以完成不同操作的机器人。众所周知,传统刚性机器人在运动学上是非冗余的,当其在狭小空间工作时,如在环境多变的管道中工作时,它的局限性就极大的凸显出来。在管道这类高度可变的环境中,不光需要机器人具有足够的强度和运动精确性,还需要机器人具有足够的顺应性,以确保任务的可靠性。
4.现有的软体管道机器人存在着以下两个问题:一是蠕动式软体管道机器人大多存在对运行管道、管径尺寸要求严格,运动模式单一等不足,并且软体机器人在管道之中的运动速度较为缓慢,影响着工作效率;二是现今对软体管道机器人的研究大多都只是停留在能够顺利的管道中完成运动以及完成一些简单的探测功能,这些对没有对软体机器人在管道中的应用有一个良好的体现,软体机器人应用于管道之中的优点远不止如此。
技术实现要素:
5.本实用新型的目的在于针对现有软体机器人的技术缺陷,提供了一种带有超声波定位功能的气动控制系统,该控制系统能使软体机器人在管道内运动,同时在遇到障碍物时能够实现对障碍物位置的检测,大大提高了软体机器人的功用。
6.本实用新型的技术方案是提供了一种基于超声波定位软体机器人气动控制系统,包括执行模块,其特征在于:执行模块包括空气压缩机第一两位三通电磁阀、第二两位三通电磁阀、第三两位三通电磁阀、第一两位两通电磁、第二两位两通电磁阀、第三两位两通电磁阀、空气压缩机、精密减压阀、第一真空泵、第二真空泵、第三真空泵;
7.第一两位三通电磁阀、第二两位三通电磁阀、第三两位三通电磁阀分别设置于第一腔体、第二腔体和第三腔体的进气侧;
8.第一两位两通电磁、第二两位两通电磁阀、第三两位两通电磁阀分别设置于第一腔体、第二腔体和第三腔体的排气侧;
9.空气压缩机经精密减压阀分别与第一两位三通电磁阀、第二两位三通电磁阀和第三两位三通电磁阀相连;
10.第一两位两通电磁、第二腔体的第二两位两通电磁阀、第三腔体的第三两位两通电磁阀分别与第一真空泵、第二真空泵、第三真空泵相连。
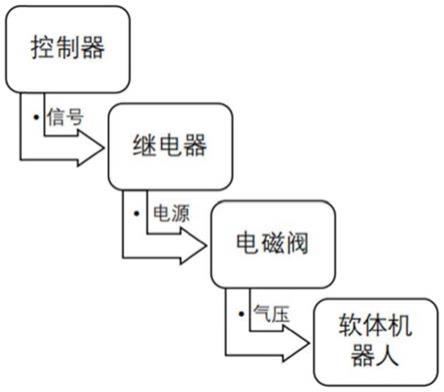
11.进一步地,还包括控制模块,控制模块包括arduino开发板、电磁继电器;外接电源给arduino开发板提供电源,开发板发出信号传递给电磁继电器,电磁继电器通过电流的作用控制第一两位三通电磁阀、第二两位三通电磁阀、第三两位三通电磁阀、第一两位两通电磁、第二两位两通电磁阀、第三两位两通电磁阀。
12.进一步地,在软体机器人头尾两端的外壳上分别附着两个超声波传感器;
13.进一步地,精密减压阀与第一两位三通电磁阀、第二两位三通电磁阀、第三两位三通电磁阀之间通过外接气动软管连接。
14.进一步地,第一真空泵与第一两位两通电磁之间、第二真空泵与第二两位两通电磁阀之间、第三真空泵与第三两位两通电磁阀之间均通过气动软管连接。
15.本实用新型的有益效果是:
16.(1)针对气动软体管道机器人的现存的理论和应用问题进行改进,尝试解决其在管道中运动模式单一、应用功能局限等难点,着力于将软体管道机器人应用到具体实际中,凸显其在实际应用中的优势。
17.(2)气动控制系统可以对每一道气路同时提供正压或负压,并且每一道气路的状态相互独立,能够顺利完成气动软体机器人的稳压控制。空气压缩机提高气压后,通过精密减压阀降压使得气流通过气路分别流入软体机器人的三个气腔。其中的每一个气腔能够有三种不同的状态,即充气、放气和保持状态,不同的状态通过电磁阀的打开和关闭进行控制。该气动控制系统可通过超声波传感器反馈的信号,探测出管道中障碍物的位置,再通过串行监视器监视气压传感器所反馈的信号实时观测气路中的气压大小,判断各气路的状态。
18.(3)本实用新型的控制方式既简洁又高效,不需复杂的气路连接,即可完成软体机器人在管道中的运动,故适用性强,可推广到多种结构的软体机器人应用之中。
附图说明
19.图1为控制系统整体方案结构示意图;
20.图2为控制系统的控制模块结构示意图;
21.图3为控制系统的执行模块结构示意图;
22.图4为气动控制平台原理示意图;
23.图5为实施例软体机器人结构示意图;
24.其中:1-第一两位三通电磁阀、2-第二两位三通电磁阀、3-第三两位三通电磁阀、4-第一两位两通电磁、5-第二两位两通电磁阀、6-第三两位两通电磁阀、7-空气压缩机、8-精密减压阀、9-第一真空泵、10-第二真空泵、11-第三真空泵。
具体实施方式
25.以下将结合附图1-5对本实用新型的控制系统方案进行完整、详细地描述。
26.如图1所示,该实施例提供了一种基于超声波定位软体机器人气动控制系统,包括控制模块和执行模块,其中:
27.控制模块包括arduino开发板、电磁继电器;通过外接电源给arduino开发板提供电源,开发板发出信号传递给电磁继电器,电磁继电器通过电流的作用控制第一两位三通电磁阀1、第二两位三通电磁阀2、第三两位三通电磁阀3、第一两位两通电磁4、第二两位两通电磁阀5、第三两位两通电磁阀6、第一真空泵9、第二真空泵10、第三真空泵11。
28.执行模块包括空气压缩机第一两位三通电磁阀1、第二两位三通电磁阀2、第三两位三通电磁阀3、第一两位两通电磁4、第二两位两通电磁阀5、第三两位两通电磁阀6、空气压缩机7、精密减压阀8、第一真空泵9、第二真空泵10、第三真空泵11。
29.第一两位三通电磁阀1、第二两位三通电磁阀2、第三两位三通电磁阀3分别设置于第一腔体、第二腔体和第三腔体的进气侧;
30.第一两位两通电磁4、第二两位两通电磁阀5、第三两位两通电磁阀6分别设置于第一腔体、第二腔体和第三腔体的排气侧;
31.第一两位三通电磁阀1、第二两位三通电磁阀2、第三两位三通电磁阀3、第一两位两通电磁4、第二两位两通电磁阀5、第三两位两通电磁阀6能够保证对软体机器人三个腔体提供不同的气压,进而使得软体机器人三个腔体变形,并形成蠕动效果,从而实现软体机器人的运动。
32.如图2-3所示,分别为组成该控制系统的控制模块及执行模块。控制模块的arduino开发板根据所写入程序控制软体机器人在管道中的运动。
33.超声波传感器由arduino开发板供给电源,用户可根据所传感器反馈的信息确定障碍物的位置。
34.气压传感器可以将气路中的实时气压大小反馈给用户。
35.通过外接的12v电源为第一两位三通电磁阀1、第二两位三通电磁阀2、第三两位三通电磁阀3、第一两位两通电磁4、第二两位两通电磁阀5、第三两位两通电磁阀6供电。第一真空泵9、第二真空泵10、第三真空泵11通过外接12v电源供电。
36.arduino开发板通过杜邦线与电磁继电器连接,电磁继电器通过导线分别与第一两位三通电磁阀1、第二两位三通电磁阀2、第三两位三通电磁阀3、第一两位两通电磁4、第二两位两通电磁阀5、第三两位两通电磁阀6、第一真空泵9、第二真空泵10、第三真空泵11连接从而控制电磁阀的打开与关闭;
37.第一真空泵9与第一两位两通电磁4、第二真空泵10与第二两位两通电磁阀5、第三真空泵11与第三两位两通电磁阀6通过气动软管连接;
38.精密减压阀8与第一两位三通电磁阀1、第二两位三通电磁阀2、第三两位三通电磁阀3均通过外接气动软管连接;
39.第一两位三通电磁阀1、第二两位三通电磁阀2、第三两位三通电磁阀3、第一两位两通电磁4、第二两位两通电磁阀5、第三两位两通电磁阀6再分别通过气动软管与腔体连接。
40.如图4所示,为实施例的软体机器人气动控制平台。该实施例的软体机器人主体结构由三道气腔组成。
41.故本实施例的气动控制平台由三道气路组成。
42.每一道气路分别连接一个气腔。
43.每一道气路都包括一个两位两通电磁阀、一个两位三通电磁阀、及一个真空泵。
44.每一道气路在第一两位两通电磁阀、第一两位三通电磁阀,及真空泵的作用下可以同时提供正压或负压,其中正压由空气压缩机7通过精密减压阀8的减压后提供,负压由真空泵提供。
45.其中,两位三通电磁阀1打开、两位二通电磁阀4关闭,第一腔体充气,两位三通电磁阀1关闭、两位二通电磁阀4打开,第一腔体泄气;两位三通电磁阀2打开、两位二通电磁阀5关闭,第二腔体充气,两位三通电磁阀2关闭、两位二通电磁阀5打开,第二腔体泄气;两位三通电磁阀3打开、两位二通电磁阀6关闭,第三腔体充气,两位三通电磁阀3关闭、两位二通电磁阀6打开,第三腔体泄气。
46.三道气路是相互独立的,故可以按照所设定的程序使气腔内冲入正负压,成功地使软体机器人气腔发生变形,完成气动式软体机器人在管道中的稳定控制。
47.如附图5所示,在软体机器人头尾两端的外壳上分别附着两个超声波传感器用于确认管道中障碍的存在与否及具体位置。
48.其中位于头端位置a的安装一超声波传感器用于探测是否有障碍物的存在,位于尾端位置b的安装一超声波传感器用来探测障碍物的存在位置。
49.该实施例的具体原理如下:
50.实验前首先将管道的末端用板料封口,位置a端超声波传感器的外壳朝下,用于判断是否存在障碍物,当在软体机器人行进过程中发现障碍物的存在时,串口监视器中检测位置a端超声波传感器的监测值会发生明显突变。
51.位置b端超声波传感器的外壳朝着软体机器人的行进方向,由于管道的一段被板料密闭,超声波传感器监测到的距离为软体机器人末端与管道末端的距离。故在发现位置a端超声波传感器的监测值发生明显突变时,在不考虑软体机器人自身变形致使的尺寸收缩的影响下,障碍物距离管道末端的距离为串口监视器中位置b端超声波传感器的监测值减软体机器人的长度。由此即可探测出管道中障碍物的位置。
52.本实用新型采用了arduino开发板作为该控制系统的控制器,控制方式简洁、高效,不需要复杂的反馈控制,适用性广。
53.本领域技术人员应该理解,上述实施例仅仅是对本实用新型的示意性实现方式的解释,并非对本实用新型包含范围的限定。故本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本实用新型保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1