一种具有数据采集功能的铁路巡防机器人的制作方法
1.本实用新型涉及铁路工程技术领域,具体为一种具有数据采集功能的铁路巡防机器人。
背景技术:
2.铁路是供火车等交通工具行驶的轨道线路,在铁路巡护的过程中,基本都是等待没有列车通过在进行巡防,日夜巡逻、哨位定位、巡逻考勤报表等,导致工作人员劳动强度大,效率低。
3.但是现有的铁路巡防机器人在实际使用过程中,不方便工作人员对巡防机器人进行操作,并且缺乏对铁路路况的监测以及侦查,当铁路路况出现问题时难以进行采集并反馈给工作人员,降低了巡防机器人的使用性能;同时,现有的铁路巡防机器人在实际使用过程中,由于在通过巡防机器人对铁路路况进行勘察时铁路表面平整度不一,使得巡防机器人容易受到一定颠簸,而巡防机器人在受到颠簸后稳定性较差容易影响勘察精度。
技术实现要素:
4.针对现有技术的不足,本实用新型提供了一种具有数据采集功能的铁路巡防机器人,克服了现有技术的不足,结构设计简单,有效的解决了现有的铁路巡防机器人在实际使用过程中,不方便工作人员对巡防机器人进行操作,并且缺乏对铁路路况的监测以及侦查,当铁路路况出现问题时难以进行采集并反馈给工作人员,降低了巡防机器人的使用性能;同时,现有的铁路巡防机器人在实际使用过程中,由于在通过巡防机器人对铁路路况进行勘察时铁路表面平整度不一,使得巡防机器人容易受到一定颠簸,而巡防机器人在受到颠簸后稳定性较差容易影响勘察精度的问题。
5.为了解决上述技术问题,本实用新型提供了如下的技术方案:
6.一种具有数据采集功能的铁路巡防机器人,包括机器人,所述机器人的外表面设置有外壳,所述机器人的外表面前侧设置有摄像头,所述机器人的一侧连接有天线;
7.所述摄像头位于机器人的外表面下侧,且所述摄像头呈活动设置。
8.优选的,所述机器人的内部设置有底座,所述底座的两侧均通过连杆安装有轮胎,所述连杆的外表面设置有限位轮,所述限位轮位于轮胎的内部一侧,且所述限位轮的直径大于轮胎的直径。
9.优选的,所述底座和机器人的两侧均安装有独立悬挂,所述独立悬挂的一端均与轮胎相连接,且所述独立悬挂与轮胎一一对应。
10.优选的,所述底座的内部设置有振动监测器,所述机器人的外表面前侧安装有警报器,所述警报器与振动监测器相电性连接。
11.优选的,所述底座的底部设置有底板,所述底板的顶部连接有贯穿底座的活动杆,所述活动杆的顶端安装有缓冲板,所述缓冲板与底座之间连接有弹簧,且所述活动杆位于弹簧的内部。
12.优选的,所述机器人的一侧开设有透气孔,所述机器人的两侧均安装有把手,且所述把手呈对角设置。
13.本实用新型实施例提供了一种具有数据采集功能的铁路巡防机器人,具备以下有益效果:机器人在移动过程中将通过摄像头对铁路内部的路况进行监控,机器人在铁轨上进行移动过程中将通过振动监测器对铁轨表面进行检测,若铁轨表面质量较差而导致产生较大的振动时振动监测器将信号反馈给警报器,从而使得警报器发出警报以警示工作人员,工作人员便可对该段铁轨进行标记并进行相关处理,并且通过在每个轮胎的位置处都一一对应设置有独立悬挂,以减少机器人受到的震动,提高稳定性,避免影响巡防机器人的检测精度,并且机器人采用六轮四驱四制动,无刷电机驱动,以提高机器人使用性能。
14.1、通过设置天线、摄像头、警报器和振动监测器,工作人员可通过外部遥控器与天线相联通,从而使得遥控器对机器人进行操作,使得机器人在铁路上前进后退,方便工作人员对机器人进行操作,并且机器人在移动过程中将通过摄像头对铁路内部的路况进行监控,工作人员从而可通过遥控器进行了解,同时,机器人在铁轨上进行移动过程中将通过振动监测器对铁轨表面进行检测,若铁轨表面质量较差而导致产生较大的振动时振动监测器将信号反馈给警报器,从而使得警报器发出警报以警示工作人员,工作人员便可对该段铁轨进行标记并进行相关处理,十分的方便,提高了机器人的使用性能。
15.2、通过设置独立悬挂、弹簧、活动杆和缓冲板,通过在每个轮胎的位置处都一一对应设置有独立悬挂,使得机器人在移动过程中将通过独立悬挂进行一定的减震缓冲作用,并且在底座内设置有缓冲板和弹簧,使得机器人在移动过程中将带动活动杆和缓冲板进行移动,此时缓冲板压缩弹簧,使得弹簧能够对缓冲板进行缓冲支撑,以减少机器人受到的震动,提高稳定性,避免影响巡防机器人的检测精度,并且机器人采用六轮四驱四制动,无刷电机驱动,以提高机器人使用性能。
附图说明
16.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
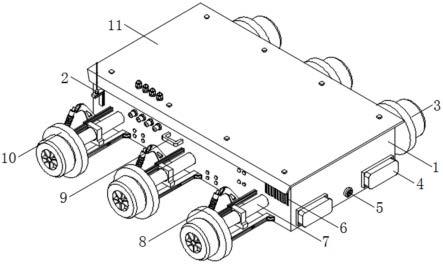
17.图1是本实用新型整体结构示意图;
18.图2是本实用新型机器人内部结构示意图
19.图3是本实用新型图2中a处的放大结构示意图。
20.图中:1、机器人;2、天线;3、轮胎;4、警报器;5、摄像头;6、透气孔;7、连杆;8、独立悬挂;9、把手;10、限位轮;11、外壳;12、底座;13、振动监测器;14、底板;15、活动杆;16、弹簧;17、缓冲板。
具体实施方式
21.以下结合附图对本实用新型的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本实用新型,并不用于限定本实用新型。
22.实施例:如图1-3所示,一种具有数据采集功能的铁路巡防机器人,包括机器人1,机器人1的外表面设置有外壳11,机器人1的外表面前侧设置有摄像头5,机器人1的一侧连接有天线2,使得工作人员可通过天线2对机器人1进行无线遥控,方便使用,提高了巡防效
率,摄像头5位于机器人1的外表面下侧,且摄像头5呈活动设置,使得机器人1在移动过程中能够通过摄像头5对铁路的路况进行监控,方便工作人员对路况进行了解。
23.具体的,请参阅图1-2,底座12的两侧均通过连杆7安装有轮胎3,机器人1将通过轮胎3进行移动,并且机器人1采用六轮四驱四制动,无刷电机驱动,以提高机器人1使用性能,限位轮10位于轮胎3的内部一侧,且限位轮10的直径大于轮胎3的直径,使得机器人1在移动过程中将通过限位轮10进行限位,以避免机器人1偏离铁轨。
24.具体的,请参阅图1,独立悬挂8的一端均与轮胎3相连接,且独立悬挂8与轮胎3一一对应,使得机器人1在移动过程中将通过独立悬挂8进行一定的减震缓冲作用,以减少机器人1受到的震动,提高稳定性,避免影响巡防机器人1的检测精度。
25.具体的,请参阅图1-2,底座12的内部设置有振动监测器13,机器人1在铁轨上进行移动过程中将通过振动监测器13对铁轨表面进行检测,机器人1的外表面前侧安装有警报器4,警报器4与振动监测器13相电性连接,若铁轨表面质量较差而导致产生较大的振动时振动监测器13将信号反馈给警报器4,从而使得警报器4发出警报以警示工作人员,工作人员便可对该段铁轨进行标记并进行相关处理。
26.具体的,请参阅图2-3,底座12的底部设置有底板14,底板14的顶部连接有贯穿底座12的活动杆15,活动杆15的顶端安装有缓冲板17,缓冲板17与底座12之间连接有弹簧16,且活动杆15位于弹簧16的内部,使得机器人1在移动过程中将带动活动杆15和缓冲板17进行移动,此时缓冲板17压缩弹簧16,使得弹簧16能够对缓冲板17进行缓冲支撑,以减少机器人1受到的震动,提高稳定性。
27.具体的,请参阅图1,机器人1的一侧开设有透气孔6,以提高机器人1的通透性,避免机器人1长时间运行后热量难以散发的情况,机器人1的两侧均安装有把手9,且把手9呈对角设置,工作人员可通过两侧的把手9将机器人1移动至铁路铁轨上。
28.工作原理:首先,工作人员可通过两侧的把手9将机器人1移动至铁路铁轨上,随后便可通过外部遥控器与天线2相联通,从而使得遥控器对机器人1进行操作,使得机器人1在铁路上前进后退,方便工作人员对机器人1进行操作,并且机器人1在移动过程中将通过摄像头5对铁路内部的路况进行监控,工作人员从而可通过遥控器进行了解,同时,机器人1在铁轨上进行移动过程中将通过振动监测器13对铁轨表面进行检测,若铁轨表面质量较差而导致产生较大的振动时振动监测器13将信号反馈给警报器4,从而使得警报器4发出警报以警示工作人员,工作人员便可对该段铁轨进行标记并进行相关处理,十分的方便,提高了机器人1的使用性能,同时,通过在每个轮胎3的位置处都一一对应设置有独立悬挂8,使得机器人1在移动过程中将通过独立悬挂8进行一定的减震缓冲作用,并且在底座12内设置有缓冲板17和弹簧16,使得机器人1在移动过程中将带动活动杆15和缓冲板17进行移动,此时缓冲板17压缩弹簧16,使得弹簧16能够对缓冲板17进行缓冲支撑,以减少机器人1受到的震动,提高稳定性,避免影响巡防机器人1的检测精度,并且机器人1采用六轮四驱四制动,无刷电机驱动,以提高机器人1使用性能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1