一种机械手的制作方法
1.本实用新型涉及机械手臂领域,具体的说是一种机械手。
背景技术:
2.随着科技的进步,仿生手的应用范围越来越广,综合运用于仿生学、机械电子、材料学、生物医学和信息技术的交叉前沿技术,也为上肢残疾、高危作业、特种任务等场景提供高效、便利的可穿戴仿生手系统,不仅满足了上肢残疾人士在工作和生活上的日常需求,还能为工业、服务等场景提供精细的终端操作工具,用于特种作业,代替人员进入易燃、易爆、剧毒、放射性等危险环境中完成精细化的操作任务。
3.目前,仿生手的旋转均采用摩擦旋转实现,使用一段时间后摩擦力会逐渐变小,为确保精确的定位角度,需要重新设置、重新调节,而且定位不牢靠,有不同程度的错位发生。另一方面,抓握过程没有缓冲力,不能实现柔和抓握,且抓握力度范围无法控制,而且抓握过程机械手无法实现有效转动,给用户带来诸多不便。
技术实现要素:
4.本实用新型需要解决的技术问题是提供一种机械手,其设计合理,结构牢固,抓握过程手腕可实现顺时针180度和逆时针180度旋转,满足了抓握过程手掌旋转的需求,而且抓握过程有一个力度的缓冲范围,能顺利实现柔和抓握。
5.为解决上述技术问题,本实用新型所采用的技术方案是:
6.本实用新型包括包括手掌、与所述手掌连接的手腕和通过指根与所述手掌连接的手指,所述手指包括拇指和通过固定轴连接在一起的第一手指、第二手指,所述第一手指和第二手指的指根通过转轴与手掌连接,所述拇指通过连接件与设置在手掌内的电机驱动轴连接,所述连接件通过转动轴与第一手指的末端连接。
7.进一步的,所述拇指与连接件的连接处设有第一转动轴,所述连接件上设有连接部,所述连接部通过连接杆与转动轴连接。
8.进一步的,所述连接部通过弹簧与拇指的末端连接。
9.进一步的, 所述连接件通过与电机驱动轴配合的摆臂与电机驱动轴连接,所述摆臂与连接件固定。
10.进一步的, 所述连接件通过支撑杆与手掌连接。
11.进一步的,所述手指还包括指根通过转轴连接在一起的第三手指和第四手指,所述第一手指、第二手指、第三手指和第四手指通过固定轴连接。
12.进一步的,所述手腕与手臂套连接,所述手腕包括固定设置在手掌底端的转动部和环绕在所述转动部外周的固定环,所述手掌通过固定环与手臂套连接,所述手臂套与手臂配合。
13.进一步的,所述转动部包括转板、通过螺栓与所述转板固定的盖板和对应设置在转板和盖板上的出线孔,所述螺栓与设置在盖板和转板上的固定孔对应。
14.进一步的,所述转板在固定环内半圆形凸起围成的空间内转动,所述转板上开设有对称的凹槽,所述凹槽内设有压簧和与所述压簧连接的滚珠,所述滚珠在凸起围成的圆周内转动。
15.进一步的, 所述固定环上设有半圆形的轨道,设置在盖板上的固定块沿轨道滑动。
16.由于采用了上述技术方案,本实用新型取得的有益效果是:
17.本实用新型设计新颖、结构合理,固定轴的设置可满足第一手指、第二手纸、第三手指和第四手指的同步动作,弹簧设置可使得手指与拇指之间抓握过程具有一定的缓冲作用,顺利实现柔和抓握,同时对电机起到有效的保护作用,避免电机被烧坏。而且该机械手对电机没有特殊要求,国标通用电机均可使用,价格实惠,实用价值高。
18.手掌在手腕的作用下可实现最大范围的顺时针180度或逆时针180度旋转,不仅满足工作过程中手掌旋转的需要,而且旋转过程杜绝了手臂套内电线旋转过程死结的发生。
附图说明
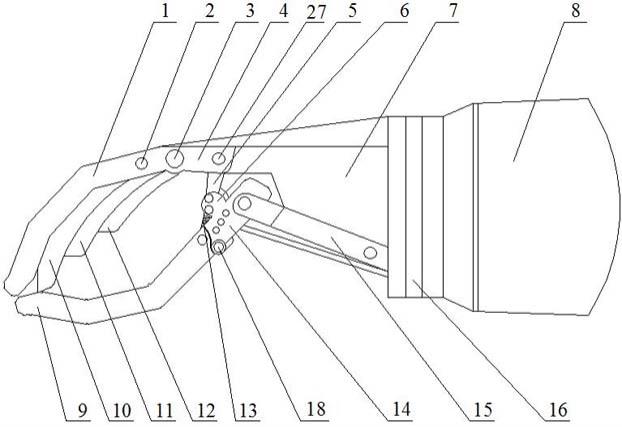
19.图1是本实用新型的侧视结构示意图;
20.图2是本实用新型的主视结构示意图;
21.图3是本实用新型手腕的内部结构示意图;
22.图4是本实用新型安装盖板的手腕结构示意图。
23.其中,1、第一手指;2、固定轴;3、转轴;4、指根;5、连接杆;6、连接部;7、手掌;8、手臂套;9、拇指;10、第二手指;11、第三手指;12、第四手指;13、弹簧;14、连接件;15、支撑杆;16、固定环;17、摆臂;18、第一转动轴;19、凸起;20、转板;21、凹槽;22、固定孔;23、轨道;24、压簧;25、出线孔;26、滚珠; 27、转动轴;28、盖板;29、固定块。
具体实施方式
24.下面结合实施例对本实用新型做进一步详细说明:
25.一种机械手, 如图1和图2所示,包括手掌7和通过指根4与所述手掌7连接的手指,所述手指包括拇指9和通过转轴3将手掌7与指根4连接的第一手指1、第二手指10,所述转轴3可使指根4与手掌7活动连接在一起。固定轴2可使第一手指1和第二手指10同时动作,实现同时弯曲或同时伸直,方便第一手指1、第二手指10同时动作与拇指9合作实现抓握。
26.所述手指还包括通过转轴3将指根4与手掌连接在一起的第三手指11和第四手指12,如图2所示, 固定轴2将第一手指1、第二手指10、第三手指11和第四手指12连接实现第一手指1、第二手指10、第三手指11和第四手指12的同时弯曲或伸直,方便第一手指1、第二手指10、第三手指11、第四手指12与拇指9共同完成抓握的动作。
27.如图1和图2所示,所述拇指9通过连接件14与设置在手掌7内电机驱动轴连接,所述连接件14通过转动轴27与第一手指1的末端活动连接。电机转动电机驱动轴通过连接件14带动拇指9、第一手指1和与第一手指1连接的第二手指10、第三手指11和第四手指12动作。
28.如图1所示,所述拇指9与连接件14的连接处设有第一转动轴18,所述连接件14上设有连接部6,所述连接部6通过连接杆5与第一手指1末端的转动轴27连接,所述连接件14
动作依次通过连接部6、连接杆5、转动轴27、转轴3、固定轴2带动第一手指1、第二手指10、第三手指11、第四手指12同时动作,同时连接件14依次通过弹簧13、第一转动轴18带动拇指9动作,保证拇指9和第一手指1、第二手指10、第三手指11、第四手指12共同完成抓握动作。
29.所述连接杆5可为弹性设置,使得第一手指1在动作的过程中具有缓冲作用,同时与第一手指1连接的第二手指10、第三手指11和第四手指12在动作过程中也具有缓冲作用。所述连接部6与拇指9之间设有弹簧13,弹簧13的设置可使得拇指9的动作具有缓冲作用,更易于实现柔和抓握,同样弹簧13和固定轴2的设置也对电机起到有效的保护作用,可防止电机被烧毁。
30.所述连接件14通过与驱动轴配合的摆臂17与驱动轴连接,所述摆臂17与连接件14固定。所述摆臂17上开设有与驱动轴配合的键槽,使摆臂17与驱动轴实现完美配合,驱动轴转动时,与之配合的摆臂17随之转动,与所述摆臂17固定的连接件14也随之转动。为确保连接件14与手掌7的牢固连接,在手掌7与连接件14之间固定设置支撑杆15,可使得连接件14与手掌7的连接更牢固可靠。
31.如图1和图2所示,所述手掌7通过手腕与手臂套8连接,如图3所示,所述手腕包括固定设置在手掌7上的转动部和环绕在所述转动部外周的固定环16,所述转动部在固定环16内转动,顺利实现手掌7的转动。所述手掌7通过固定环16与手臂套8连接,所述手臂套8与手臂连接。
32.如图3和图4所示,所述转动部包括转板20、与所述转板20配合的盖板28和对应设置在转板20和盖板28上的出线孔25,所述出线孔25的设置方便将接线引出,为防止接线磨损可将出线孔25的外壁套上橡胶垫。所述转板20、与所述转板20配合的盖板28通过螺栓固定,所述螺栓与设置在盖板28和转板20上的固定孔22对应。这样,手腕正转或反转,转板20与盖板28同时正转或反转。
33.如图3所示,所述转板20与固定环16内壁的半圆形凸起19对应,所述转板20上开设有对称的凹槽21,所述凹槽21内设有压簧24和与所述压簧24连接的滚珠26,所述滚珠26在凸起19围成的圆周内转动。转板20在外力的作用下转动时,滚珠26在压簧24的作用下在凸起19和凸起19间转动,当滚珠26转动到凸起19间而停止转动时,滚珠26被卡置在凸起19间,实现锁止,在不受外力的情况下不再转动。这样的设置,使手腕转动时实现精确定位,杜绝了错位现象的发生,方便长期使用。
34.如图3和图4所示,所述固定环16上设有半圆形的轨道23,所述轨道23与设置在盖板28上的固定块29对应,所述轨道23的设置使固定块29只能在轨道23内顺时针或逆时针转动,由于轨道23为半圆形设计,所以与固定块29固定的盖板28和与盖板28固定的转板20只能实现顺时针最大限度的转动180度或逆时针最大限度的转动180度,满足了日常手腕转动的需要,同时顺时针转动过程中手臂套8内与电机连接的电线会拧接在一起,当逆时针转动时手臂套8内与电机连接的拧接在一起的电线会疏松开,避免了电线拧接成死结而影响正常使用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1