协作机器人的风险评价指导装置以及方法与流程
1.本公开涉及协作机器人的风险评价指导装置以及方法。
背景技术:
2.已知机器人的导入需要风险评价(例如,参照专利文献1。)。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2014-188644号公报
技术实现要素:
6.发明要解决的问题
7.对于协作机器人的风险评价,用户不熟悉。因此,优选即使是不熟悉的用户也能够简单且适当地进行风险评价。
8.用于解决问题的方案
9.本公开的一个方案是一种协作机器人的风险评价指导装置,具备:输入装置,其接受用户的输入;存储装置,其存储信息;显示装置,其显示信息;以及至少一个处理装置,该处理装置用于,利用所述输入装置使用户输入包含与人的协作条件的基本信息,利用所述输入装置使所述用户选择与所输入的所述基本信息对应地存储在所述存储装置中的危险源的候选信息中的至少一个,根据与所选择的所述危险源的候选信息对应地存储在所述存储装置中的风险内容信息进行风险评价,判定该风险评价的结果是否在可允许的风险以下,在判定所述风险评价的结果不在可允许的风险以下的情况下,在所述显示装置上显示使人与协作机器人不分割空间地进行分离的对策方案。
附图说明
10.图1是示出本公开的一个实施方式的风险评价指导装置的框图。
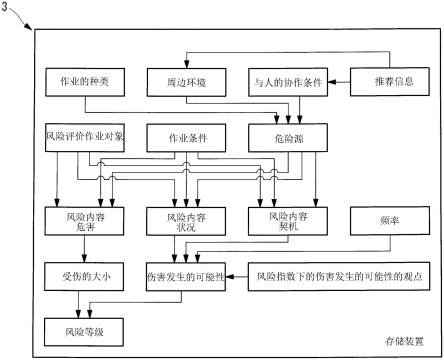
11.图2是示出图1的风险评价指导装置的存储装置中存储的信息的图。
12.图3是示出图2的存储装置中的危险源列表的详细内容的图。
13.图4是示出图2的存储装置中的周边环境的详细内容的图。
14.图5是示出图2的存储装置中的与人的协作条件的详细内容的图。
15.图6是示出图2的存储装置中的危险源或危险事件列表的详细内容的图。
16.图7是示出图6的后续的图。
17.图8是示出本公开的一个实施方式的风险评价指导方法的流程图。
18.图9是示出从图8继续的流程图。
19.图10是示出从图9继续的流程图。
20.图11是示出从图10继续的流程图。
21.图12是示出用于缩小图2的存储装置中的危险源的候选信息的范围的问题事项的
图。
具体实施方式
22.以下参照附图对本公开的一个实施方式的协作机器人的风险评价指导装置1以及方法进行说明。
23.如图1所示,本实施方式的风险评价指导装置1具备接受用户的输入的输入装置2、存储信息的存储装置3、显示信息的显示装置4以及至少一个处理装置5。
24.输入装置2例如是键盘或鼠标等。
25.存储装置3例如是存储器。显示装置例如是监视器。
26.处理装置5是cpu等处理器。
27.如图2所示,在存储装置3中存储有与“作业的种类”、“周边环境”以及“与人的协作条件”这三项对应的基本信息、以及与基本信息的各项目对应的“危险源”的候选。而且,如图2所示,在存储装置3中存储有“风险评价对象作业”、“作业条件”、“风险内容”、“受伤的大小”、“伤害发生的可能性”、“风险等级”、“频率”、“风险指数下的伤害发生的可能性的观点”、“推荐信息”、“风险评价实施者”、“风险评价批准者”以及“残留风险”。
28.作为“危险源列表”,例如存储有图3所示的信息。
29.作为“周边环境”,例如存储有图4所示的信息。
30.作为“与人的协作条件”,例如存储有图5所示的信息。
31.作为“危险源”或“危险事件列表”的候选,例如存储有图6和图7所示的信息。
[0032]“作业的种类”、“周边环境”以及“与人的协作条件”中包含的各信息与“危险源”中的任意一个相对应。
[0033]
作为“风险评价对象作业”,存储有“稳定作业”、“非稳定作业”、“暂定作业”以及“异常作业”。
[0034]
作为“作业条件”,存储有“作业时运转的设备等”以及“用户的指定保护用具等的佩戴状况”。在“作业时运转的设备等”中,按每个设备种类存储有运转、非运转、紧急停止、异常停止等。在“用户的指定保护用具等的佩戴状况”中,存储有头盔、手套、皮手套、安全鞋、保护眼镜等由作业标准表等指定的保护用具等。
[0035]
作为“频率”,存储有进行作业的频率的选项。
[0036]
作为“风险指数下的伤害发生的可能性的观点”,存储有“隔离安全”、“能够回避危险源的可能性”、“作业时的人的注意力”以及“访问危险源的频率”的选项。
[0037]
作为“风险内容”,存储有“危害”、“状况”、“契机”的选项。作为“危害”,存储有“受伤的部位及其程度”的选项。作为“状况”,存储有“谁在做什么的时候”的选项。作为“契机”,存储有“发生了什么”的选择。
[0038]“风险内容”的“危害”、“状况”及“契机”分别与“危险源”、“风险评价对象作业”、“作业条件”、“与人的协作条件”、“作业的种类”以及“周边环境”相对应地存储。
[0039]
作为“受伤的大小”,作为对策前的风险评价的受伤的大小的候选、“重大/障碍(休业伤害)”、“轻伤/轻症(不休业伤害)”、“红药水伤害(指涂红药水程度的轻微伤害)”以及“无害”与“风险内容”的“危害”相对应地存储。
[0040]
作为“伤害发生的可能性”,存储有作为对策前的风险评价的伤害发生的可能性的
候选、“确实发生”、“可能性高”、“有可能性”以及“几乎不发生”。“伤害发生的可能性”与“风险内容”的“状况”和“契机”、“频率”和“风险指数下的伤害发生的可能性的观点”相对应地存储。
[0041]
在“风险等级”中,作为对策前的风险评价的风险等级的候选“不能允许”、“有重大问题”、“有问题”、“能够允许”以及“不需要对策”,与“受伤的大小”和“伤害发生的可能性”相对应地存储。
[0042]
作为“推荐信息”,例如存储有多个在不分割协作机器人与人的空间的情况下使之分离的候选对策方案。
[0043]
例如,作为候选对策方案,可以例举“利用作业台将协作机器人与用户隔开”或“用路锥(注册商标)及链条围在协作机器人的周围来与用户隔开”等。这些候选对策方案用于在协作机器人与用户之间空出预定的距离而不分割空间。
[0044]
在所存储的候选对策方案中加入考虑“周边环境”的“周边装置”中的“机械设备等的布局”以及“与人的协作条件”而计算出的数值的信息,从而创建推荐信息。
[0045]
例如,在候选对策方案为“利用作业台隔开协作机器人和用户”的情况下,计算并追加作业台的位置、作业台的高度以及作业台的宽度等。
[0046]
另外,根据机械设置等的布局以及与人的协作条件,在用户的头部、颈部或下肢部进入协作机器人的可动范围的情况下,将作业台的位置、高度及宽度的至少一个值设定得较大,以避免这种情况。
[0047]
处理装置5进行根据输入的各种信息求出风险等级的风险评价,并判定风险等级是否在可允许的风险以下。处理装置5在判定在可允许的风险以下的情况下,在上级进行了确认及批准之后,记录(保管)风险评价的内容。
[0048]
在判定风险等级不在可允许的风险以下的情况下,处理装置5阶段性地进行条件的重新评价、对策的推荐、残留风险的信息公开。
[0049]
以下对使用了如此构成的本实施方式的风险评价指导装置1的风险评价指导方法进行说明。
[0050]
在开始风险评价时,首先,如图8所示,处理装置5使用户输入各种信息。
[0051]
即,处理装置5将计数器n复位(步骤s1),从存储装置3依次读取“作业的种类”(基本信息)、“风险评价对象作业”、“频率”以及“风险指数下的伤害发生的可能性的观点”的候选,并依次显示在显示装置4上(步骤s2、s4、s6、s8)。然后,使用户从显示在显示装置4上的候选中选择与各个项目对应的信息。用户使用输入装置2选择显示在显示装置4上的信息(步骤s3、s5、s7、s9)。
[0052]
另外,如图9所示,处理装置5还从存储装置3依次读取与“作业条件”、“周边环境”(基本信息)以及“与人的协作条件”(基本信息)对应的信息的候选,并显示在显示装置4上(步骤s10、s12、s14)。然后,使用户从显示在显示装置4上的候选中选择与各个项目对应的信息。用户使用输入设备2选择显示在显示设备4上的信息(步骤s11、s13、s15)。
[0053]
接着,如图10所示,处理装置5从存储装置3读取与所选择的基本信息相对应地存储的“危险源”的候选并显示在显示装置4上(步骤s16),并使用户选择至少一个危险源的候选。用户使用输入设备2选择显示在显示设备4上的信息(步骤s17)。
[0054]
在选择了危险源后,处理装置5从存储装置3读取与所选择的危险源相对应地存储
的“风险内容”的候选(步骤s18、s20、s22)。另外,处理装置5从读取的“风险内容”的候选中仅提取与输入的“风险评价对象作业”、“作业的种类”、“周边环境”、“与人的协作条件”以及“作业条件”对应的候选。
[0055]
然后,处理装置5将提取出的“风险内容”的“危害”、“状况”以及“契机”的各候选显示在显示装置上供用户选择。用户使用输入装置2选择显示在显示装置4上的信息(步骤s19、s21、s23)。
[0056]
而且,如图11所示,处理装置5从所选择的“危害”的内容中选择“受伤的大小”(步骤s24)。另外,处理装置5从所选择的“状况”及“契机”、已经输入的“频率”及“风险指数下的伤害发生的可能性的观点”中选择“伤害发生的可能性”(步骤s25)。然后,处理装置5根据所选择的“受伤的大小”和“伤害发生的可能性”来确定风险等级,从而进行对策前的风险评价(步骤s26)。
[0057]
接着,处理装置5判定风险等级是否在可允许的风险以下(步骤s27),在可允许的风险以下的情况下,请求上级的确认及批准(步骤s28)。处理装置5将批准的风险评价结果记录(或打印输出)到存储装置3(步骤s29)。
[0058]
另一方面,在步骤s27中,在风险等级不在可允许的风险以下的情况下,判定计数器n是否为1(步骤s30),在计数器n=1的情况下,使计数器n递增,并重复从步骤s10开始的工序(步骤s31)。即,在显示装置4上显示“作业条件”、“周边环境”以及“与人的协作条件”的候选,使用户重新评价条件(步骤s10~步骤s15)。
[0059]
根据用户重新评价的信息,处理装置5实施步骤s16~步骤s26的工序,重新确定风险等级。若所确定的风险等级再次不在可允许的风险以下,则判定是否计数器n=2(步骤s32)。
[0060]
在计数器n=2的情况下,计数器n递增(步骤s33),从存储装置3读取推荐信息(步骤s34)。用户使用输入装置2选择显示在显示装置4上的任意一个推荐信息(步骤s35)。
[0061]
在用户选择了推荐信息的情况下,在此前输入的信息内,改写"周边环境"及"与人的协作条件"的信息。然后,根据改写后的信息,重复从步骤s16开始的工序,重新确定风险等级(步骤s26)。
[0062]
在所确定的风险等级再次不在可允许的风险以下的情况下,判定是否计数器n=2(步骤s32),由于n=3,因此在步骤s36中提示残留风险信息。之后,不进行再次的风险评价,而进行上级的确认及批准(步骤s28)。
[0063]
采取保护方案后仍存在的残留风险,需要公开信息,并要求“在作业步骤中描述对策”、“设置标识、警告显示”、“佩戴保护用具”以及实施“教育培训”等的回答。
[0064]
由此,根据本实施方式的协作机器人的风险评价指导装置1,从存储装置3中读取协作机器人的风险评价所需的事项并显示在显示装置4上。因此,用户只要从所显示的事项中选择符合的事项,就能够实施风险评价。
[0065]
尤其是输入“与人的协作条件”作为基本信息,因此具有即使是不熟悉风险评价的用户也能够简单地进行风险评价的优点。并且,在所输入的信息无法将风险等级降低到允许等级以下的情况下,提示在协作机器人与用户之间不分割空间而是拉开距离的推荐信息。由此,能够使用户简单地实施用于降低风险等级的对策。
[0066]
此外,在本实施方式中,也可以在实施图6的风险评价指导之前,使用户输入与风
险评价相关的持有资格。另外,也可以在显示装置4上显示用于缩小危险源的候选信息的范围的问题事项,并使用户回答。
[0067]
作为输入的持有资格,能够例举sla:安全读取评价、sa:安全评价、ssa:安全子评价以及sba:安全基本评价。
[0068]
另外,作为预先回答的问题事项,例如图12所示。对这些问题事项,用“是”、“否”或“不知道”这三个选项进行回答。
[0069]
并且,在针对根据输入的持有资格而被判定为与风险评价相关的知识水平高的用户的风险评价指导中,也可以不要求选择回答了“是”的问题事项的相关项目。作为相关项目,能够列举危险源的选项。
[0070]
即,仅显示与回答了“否”或“不知道”的问题事项相关的危险源供其选择即可。由此,具有如下优点:对于与风险评价相关的知识水平高的用户,能够减少选择事项,降低繁杂性。
[0071]
另外,在本实施方式中,如图11所示,在步骤s27中,在第一次风险评价中,仅在风险等级不在可允许的风险以下的情况下,从步骤s10重新评价条件。取而代之,也可以反复进行条件的重新评价,直到残留风险成为可允许的范围。
[0072]
附图标记说明:
[0073]
1风险评价指导装置
[0074]
2输入装置
[0075]
3存储装置
[0076]
4显示装置
[0077]
5处理装置
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1