机器人系统以及控制方法与流程
本发明涉及机器人系统以及控制方法。
背景技术:
1、以往,为了测定与具有三维形状的对象物的距离,提出了各种技术(例如,参照专利文献1)。专利文献1所记载的三维测量装置具备:形状测定部,其针对存在于拍摄视野中的拍摄物表面上的各点取得距离信息;以及指示器,其露出地配置在传感器壳体,表示基于形状测定部取得的距离信息而计算出的拍摄物表面与三维测量装置中的基准点之间的位置关系。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2019-207152号公报
技术实现思路
1、发明所要解决的课题
2、在通过机器人取出瓦楞纸箱等那样的被层叠的对象物来向其他场所(货盘等)进行堆叠时,具有机器人的机器人系统需要准确地取得对象物的厚度。因此,期望高精度地取得对象物的厚度。
3、用于解决课题的手段
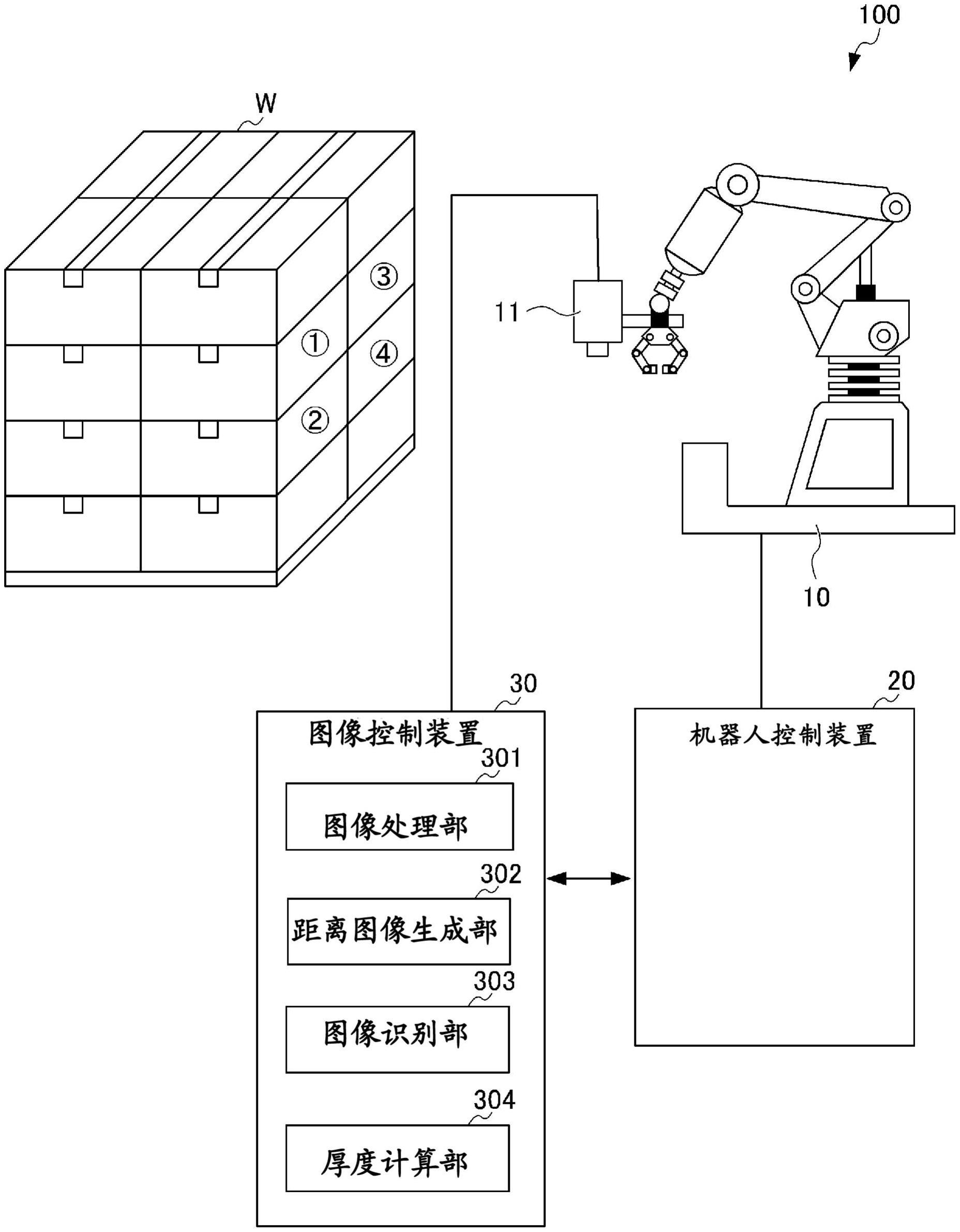
4、本公开的机器人系统具备:拍摄部,其拍摄对象物的二维图像;图像处理部,其基于所述二维图像来取得所述对象物的距离信息;距离图像生成部,其基于所述距离信息来生成距离图像;以及厚度计算部,其基于所述距离图像来计算所述对象物的厚度,所述拍摄部不管所述对象物的侧面与所述拍摄部的位置关系如何,都拍摄所述对象物的所述二维图像。
5、本公开的机器人系统的控制方法具备:拍摄对象物的二维图像的步骤;基于所述二维图像取得所述对象物的距离信息的步骤;基于所述距离信息生成距离图像的步骤;以及基于所述距离图像来计算所述对象物的厚度的步骤,拍摄所述对象物的所述二维图像的拍摄部不管所述对象物的侧面与所述拍摄部的位置关系如何,都拍摄所述对象物的所述二维图像。
6、发明效果
7、根据本发明,能够高精度地取得对象物的厚度。
技术特征:
1.一种机器人系统,其特征在于,具备:
2.根据权利要求1所述的机器人系统,其特征在于,
3.根据权利要求1或2所述的机器人系统,其特征在于,
4.一种机器人系统的控制方法,其特征在于,具有:
技术总结
本发明提供能够高精度地取得对象物的厚度的机器人系统以及控制方法。机器人系统具备:拍摄部,其搭载在机器人上,拍摄对象物的二维图像;图像处理部,其基于所述二维图像来取得所述对象物的距离信息;距离图像生成部,其基于所述距离信息来生成距离图像;以及厚度计算部,其基于所述距离图像来计算所述对象物的厚度,所述拍摄部无论所述对象物的侧面与所述拍摄部的位置关系如何,都拍摄所述对象物的所述二维图像。
技术研发人员:井航太,太田悠介
受保护的技术使用者:发那科株式会社
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!