电流限制装置、机器人系统以及电流限制方法与流程
本公开涉及电流限制装置、机器人系统以及电流限制方法,特别涉及限制向驱动部通电的电流的电流限制装置、机器人系统以及电流限制方法。
背景技术:
1、以往,公知有设定了向马达通电的电流的上限值的机器人。例如日本特开2008-73790号公报中公开有这样的机器人。
2、日本特开2008-73790号公报中公开有如下机器人,即具备:多个连杆经由关节而连接的机器人主体;设置于机器人主体的关节的马达;以及使马达的旋转减速的减速部。该机器人中设置有计测向马达通电的电流的电流计测单元。而且,基于在机器人主体静止时由电流计测单元计测到的电流值,设定向马达通电的电流的上限值。具体而言,根据在机器人静止时维持规定姿势所需要马达的扭矩,设定电流的一定的上限值。由此,能够根据机器人的姿势而适当地限制给予关节的驱动扭矩。
3、专利文献1:日本特开2008-73790号公报
4、在日本特开2008-73790号公报所记载那样的、设置有使马达的旋转减速的减速部的现有的机器人中,在从马达到减速部之间存在惯量(马达自身的惯量、减速部的齿轮的惯量等)。这里,扭矩用惯量与加速度的积表示,因此,在使由马达驱动的臂的运动加速(增大加速度)的情况下,若惯量较大,则相应地,所需要的扭矩变大。即,需要增大向马达通电的电流来增大马达所产生的扭矩。然而,如日本特开2008-73790号公报那样,在对向马达通电的电流设定有一定的上限值的情况下,存在即使向马达通电电流的上限值,马达也无法产生充分的扭矩的情况。因此,在从马达到减速部(驱动力传递部)之间的惯量较大的情况下,存在无法充分地加速由马达(驱动部)驱动的部件(臂等)的问题。
技术实现思路
1、本公开是为了解决上述课题而完成的,本公开的一个目的是提供一种即使在从驱动部到驱动力传递部之间的惯量较大的情况下,也能够充分地加速由驱动部驱动的部件的电流限制装置、机器人系统以及电流限制方法。
2、为了实现上述目的,本公开的第一形态的电流限制装置是限制向经由驱动力传递部传递驱动力的驱动部通电的电流的电流限制装置,其中,具备将向驱动部通电的电流限制在电流限制值的范围内的电流限制部,电流限制值设定为根据驱动部的加速度而变化。这里,“驱动部”是包括马达、比例螺线管等的概念。另外,“加速度”是不仅包括通常的加速度还包括角加速度的概念。
3、在本公开的第一形态的电流限制装置中,如上所述,向驱动部通电的电流的电流限制值设定为根据驱动部的加速度而变化。由此,即使在从驱动部到驱动力传递部之间的惯量较大的情况下,也能够根据驱动部的加速度,使电流限制值变化,从而使驱动部产生充分的扭矩。其结果是,即使在从驱动部到驱动力传递部之间的惯量较大的情况下,也能够充分地加速由驱动部驱动的部件(臂等)。
4、本公开的第二形态的机器人系统具备:机器人;和机器人控制部,控制机器人,机器人包括:关节;马达,设置于关节;以及减速部,使马达的旋转减速,机器人控制部包括电流限制部,上述电流限制部将向马达通电的电流限制在电流限制值的范围内,电流限制值设定为根据马达的加速度而变化。
5、在本公开的第二形态的机器人系统中,如上所述,向马达通电的电流的电流限制值设定为根据马达的加速度而变化。由此,即使在从马达到减速部之间的惯量较大的情况下,也能够根据马达的加速度,使电流限制值变化,从而使马达产生充分的扭矩。其结果是,能够提供一种即使在从马达到减速部之间的惯量较大的情况下,也能够充分地加速由马达驱动的臂的机器人系统。
6、本公开的第三形态的电流限制方法是限制向经由驱动力传递部传递驱动力的驱动部通电的电流的电流限制方法,其中,具备如下步骤:取得驱动部的加速度;基于已取得的驱动部的加速度,设定向驱动部通电的电流的电流限制值;以及在已设定的电流限制值的范围内,向驱动部通电。
7、本公开的第三形态的电流限制方法,如上所述,具备如下步骤:基于已取得的驱动部的加速度,设定向驱动部通电的电流的电流限制值。由此,即使在从驱动部到驱动力传递部之间的惯量较大的情况下,也能够根据驱动部的加速度,使电流限制值变化,从而使驱动部产生充分的扭矩。其结果是,能够提供一种即使在从驱动部到驱动力传递部之间的惯量较大的情况下,也能够充分地加速由驱动部驱动的部件(臂等)的电流限制方法。
8、根据本公开,如上所述,即使在从驱动部到驱动力传递部之间的惯量较大的情况下,也能够充分地加速由驱动部驱动的部件。
技术特征:
1.一种电流限制装置,限制向驱动部通电的电流,所述驱动部通过流动电流而产生力或力矩,并经由驱动力传递部传递驱动力,
2.根据权利要求1所述的电流限制装置,其特征在于,
3.根据权利要求1或2所述的电流限制装置,其特征在于,
4.根据权利要求1~3中的任一项所述的电流限制装置,其特征在于,
5.根据权利要求1~4中的任一项所述的电流限制装置,其特征在于,
6.根据权利要求5所述的电流限制装置,其特征在于,
7.根据权利要求1~6中的任一项所述的电流限制装置,其特征在于,
8.根据权利要求7所述的电流限制装置,其特征在于,
9.根据权利要求8所述的电流限制装置,其特征在于,
10.根据权利要求8或9所述的电流限制装置,其特征在于,
11.根据权利要求10所述的电流限制装置,其特征在于,
12.根据权利要求10或11所述的电流限制装置,其特征在于,
13.根据权利要求9~12中的任一项所述的电流限制装置,其特征在于,
14.根据权利要求1~13中的任一项所述的电流限制装置,其特征在于,
15.根据权利要求14所述的电流限制装置,其特征在于,
16.一种机器人系统,其特征在于,具备:
17.一种电流限制方法,限制向驱动部通电的电流,所述驱动部通过流动电流而产生力或力矩,并经由驱动力传递部传递驱动力,
技术总结
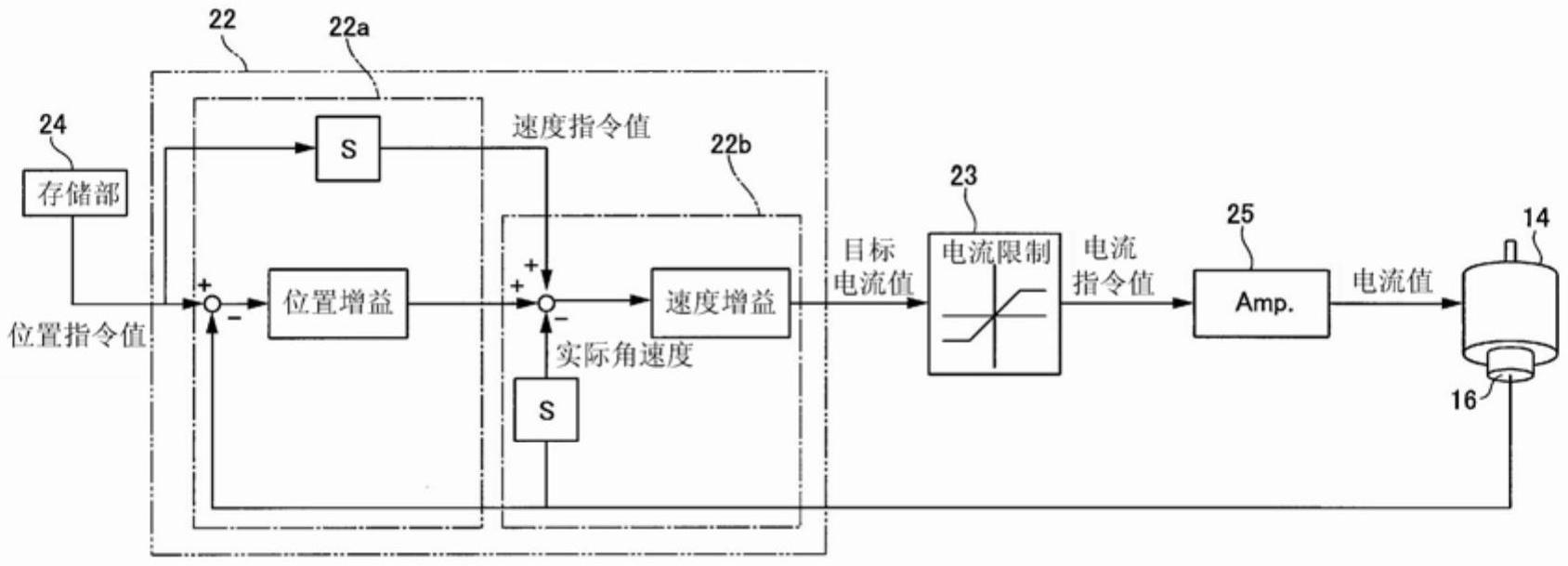
该电流限制装置(21)具备将向驱动部(14)通电的电流限制在电流限制值的范围内的电流限制部(23),电流限制值设定为根据驱动部(14)的加速度而变化。
技术研发人员:田边雅隆,中村贤太
受保护的技术使用者:川崎重工业株式会社
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!