焊接装置、焊接系统以及加工装置的制作方法
本发明涉及一种照射加工光来进行焊接的焊接装置、焊接系统以及照射加工光来加工对象物的加工装置的。
背景技术:
1、作为此种装置,例如提出有从安装于机械臂的激光头朝向应焊接的部分投射激光光的装置(参照专利文献1)。作为其他的相关技术,可列举专利文献2。作为此种装置存在的技术课题,例如可列举对具有立体形状的基板(即,三维(three dimensional,3d)基板)适当地进行焊接。
2、[现有技术文献]
3、[专利文献]
4、专利文献1:美国公开2001/0054637号公报
5、专利文献2:美国公开2015/0158176号公报
技术实现思路
1、根据第一形态,提供一种焊接装置,照射使配置于电路基板的焊料熔融的加工光,所述焊接装置包括:光照射装置,具有检流镜,经由所述检流镜来照射所述加工光;检测装置,对来自所述电路基板的光进行检测,生成图像数据与形状数据中的至少一个数据;机械臂,设有所述光照射装置与所述检测装置,且具有使所述光照射装置与所述检测装置移动的驱动部;以及控制装置,基于伴随所述检测装置的位移而变化的所述至少一个数据来控制所述检流镜的方向,以使来自与所述检测装置一同位移的所述光照射装置的所述加工光照射至同一位置。
2、根据第二形态,提供一种加工装置,对于对象物照射加工光,所述加工装置包括:光照射装置,具有扫描部,经由所述扫描部来照射所述加工光;检测装置,对来自所述对象物的光进行检测;移动装置,设有所述光照射装置与所述检测装置,且具有使所述光照射装置与所述检测装置移动的驱动部;以及控制装置,基于所述检测装置的检测结果来控制所述扫描部。
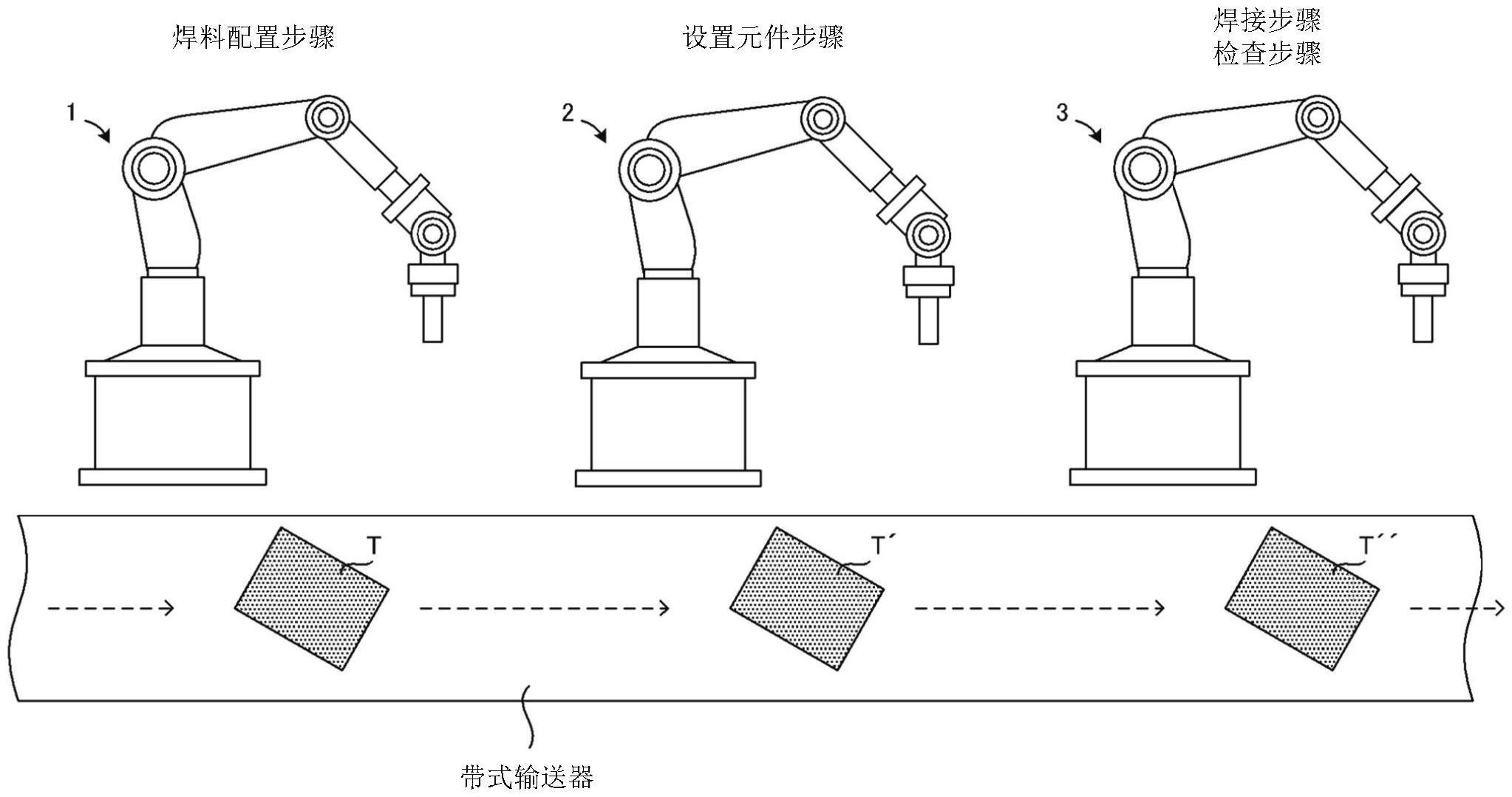
3、根据第三形态,提供一种焊接系统,将组件焊接至电路基板,所述焊接系统包括:第一移动装置,设有喷出焊料的焊料喷出装置,且具有使所述焊料喷出装置移动的驱动部;第二移动装置,设有可保持所述组件的保持装置,且具有使所述保持装置移动的驱动部;第三移动装置,设有照射使焊料熔融的加工光的光照射装置与对来自所述电路基板的光进行检测的检测装置,且具有使所述光照射装置与所述检测装置移动的驱动部;以及控制装置,(i)控制所述焊料喷出装置,以将焊料配置于所述电路基板的规定部分,(ii)控制所述保持装置,以将所述组件经由所述配置的所述焊料而配置于所述电路基板,(iii)基于所述检测装置的检测结果来控制所述第三移动装置的所述驱动部,以使所述光照射装置接近所述电路基板,且控制所述光照射装置,以使所配置的所述焊料熔融。
4、根据第四形态,提供一种焊接系统,将组件焊接至电路基板,所述焊接系统包括:焊料喷出装置,喷出焊料;保持装置,可保持所述组件;光照射装置,照射使焊料熔融的加工光;检测装置,对来自所述电路基板的光进行检测;移动装置,具有使所述焊料喷出装置、所述保持装置、所述光照射装置及所述检测装置移动的驱动部;以及控制装置,(i)控制所述驱动部,以使所述焊料喷出装置、所述保持装置、所述光照射装置及所述检测装置接近所述电路基板,(ii)控制所述焊料喷出装置,以将焊料配置于所述电路基板的规定部分,(iii)控制所述保持装置,以将所述组件经由所配置的所述焊料而配置于所述电路基板,(iv)控制所述光照射装置,以使所配置的所述焊料熔融。
5、根据第五形态,提供一种加工装置,对于对象物照射加工光,所述加工装置包括:光照射装置,照射所述加工光;检测装置,对来自所述对象物的光进行检测;移动装置,设有所述光照射装置与所述检测装置,且具有使所述光照射装置与所述检测装置移动的驱动部;以及控制装置,基于所述检测装置的检测结果来控制所述驱动部。
技术特征:
1.一种控制装置,进行用于对机械臂的驱动部进行控制的数据处理,所述机械臂设有对于对象物进行处理的末端执行器、拍摄装置及立体摄像机且使所述末端执行器、所述拍摄装置及所述立体摄像机移动,所述控制装置的特征在于包括处理部,
2.根据权利要求1所述的控制装置,其特征在于,
3.根据权利要求1或2所述的控制装置,其特征在于,
4.根据权利要求1至3中任一项所述的控制装置,其特征在于所述立体摄像机包含与所述拍摄装置不同的两个拍摄装置。
5.一种机器人系统,将第一物体设置于与所述第一物体分隔的第二物体,所述机器人系统的特征在于包括:
6.根据权利要求5所述的机器人系统,其特征在于,
7.根据权利要求5或6所述的机器人系统,其特征在于,
8.根据权利要求7所述的机器人系统,其特征在于,所述机器人系统在所述第一物体被设置于所述第二物体后,基于通过所述拍摄装置拍摄所述第一物体而获取的图像数据,来进行与所述第一物体向所述第二物体的所述设置状态相关的检查。
9.根据权利要求7或8所述的机器人系统,其特征在于,所述机器人系统在所述第一物体被设置于所述第二物体后,基于形状数据来进行与所述第一物体向所述第二物体的所述设置状态相关的检查,所述形状数据是根据通过所述立体摄像机拍摄所述第一物体而获取的图像数据所生成且表示所述第二物体的三维形状。
10.根据权利要求6至9中任一项所述的机器人系统,其特征在于,
11.根据权利要求6至10中任一项所述的机器人系统,其特征在于,
12.根据权利要求5至11中任一项所述的机器人系统,其特征在于,
13.根据权利要求12所述的机器人系统,其特征在于,所述电路基板的至少一部分包含设于所述电路基板的衬垫。
14.根据权利要求5至13中任一项所述的机器人系统,其特征在于,所述第一物体与所述第二物体包含相互嵌合的物体。
15.根据权利要求14所述的机器人系统,其特征在于,所述第一物体及所述第二物体的其中一者包含具有凸部的物体,所述第一物体及所述第二物体的另一者包含具有与所述凸部嵌合的凹部的物体。
16.一种控制装置,进行用于对机械臂的驱动部进行控制的数据处理,所述机械臂设有保持第一物体的保持装置及拍摄部且使所述保持装置及所述拍摄部移动,所述控制装置的特征在于包括处理部,
17.根据权利要求16所述的控制装置,其特征在于,
18.根据权利要求17所述的控制装置,其特征在于,所述处理部在所述第一物体被设置于所述第二物体后,基于通过所述拍摄装置拍摄所述第一物体而获取的图像数据,来进行与所述第一物体向所述第二物体的所述设置状态相关的检查。
19.根据权利要求17或18所述的控制装置,其特征在于,所述处理部在所述第一物体被设置于所述第二物体后,基于形状数据来进行与所述第一物体向所述第二物体的所述设置状态相关的检查,所述形状数据是根据通过所述立体摄像机拍摄所述第一物体而获取的图像数据所生成且表示所述第二物体的三维形状。
20.根据权利要求16至20中任一项所述的控制装置,其特征在于,与所述第一物体向所述第二物体的所述设置状态相关的检查包含:判定所述第一物体向所述第二物体的设置位置的良否。
21.根据权利要求16至21中任一项所述的控制装置,其特征在于,与所述第一物体向所述第二物体的所述设置状态相关的检查包含:判定所述第一物体向所述第二物体的设置姿势的良否。
22.根据权利要求16至21中任一项所述的控制装置,其特征在于,所述控制装置基于从所述处理部输出的所述信息来生成用于对所述机械臂的驱动部进行控制的控制信号,将所生成的所述控制信号输出至对所述机械臂的所述驱动部进行控制的机器人控制部。
23.根据权利要求16至22中任一项所述的控制装置,其特征在于,
24.根据权利要求23所述的控制装置,其特征在于,所述电路基板的至少一部分包含设于所述电路基板的衬垫。
25.根据权利要求16至24中任一项所述的控制装置,其特征在于,所述第一物体与所述第二物体包含相互嵌合的物体。
26.根据权利要求25所述的控制装置,其特征在于,所述第一物体及所述第二物体的其中一者包含具有凸部的物体,所述第一物体及所述第二物体的另一者包含具有与所述凸部嵌合的凹部的物体。
27.根据权利要求25或26所述的控制装置,其特征在于,
28.一种控制装置,进行用于对机械臂的驱动部进行控制的数据处理,所述机械臂设有对于对象物进行处理的末端执行器及拍摄部且使所述末端执行器及所述拍摄部移动,所述控制装置的特征在于包括处理部,
29.根据权利要求28所述的控制装置,其特征在于,
30.根据权利要求28或29所述的控制装置,其特征在于,
31.根据权利要求28至30中任一项所述的控制装置,其特征在于,所述处理部在基于通过所述拍摄部拍摄所述末端执行器的至少一部分所获取的图像数据而检测出所述末端执行器的位置及姿势中的至少一者的变化的情况下进行所述校准。
32.根据权利要求28至31中任一项所述的控制装置,其特征在于,所述处理部在基于通过所述拍摄部拍摄已进行了所述校准的所述末端执行器的至少一部分所获取的图像数据而检测出所述末端执行器的位置及姿势中的至少一者的变化的情况下,再次进行所述校准。
33.根据权利要求28至32中任一项所述的控制装置,其特征在于,
34.根据权利要求33所述的控制装置,其特征在于,所述处理部基于通过所述拍摄装置拍摄所述末端执行器的至少一部分而获取的图像数据来进行所述末端执行器的所述校准。
35.根据权利要求33或34所述的控制装置,其特征在于,所述处理部基于形状数据来进行所述末端执行器的所述校准,所述形状数据是根据通过所述立体摄像机拍摄所述末端执行器的至少一部分而获取的图像数据所生成且表示所述末端执行器的至少一部分的三维形状。
36.根据权利要求28至35中任一项所述的控制装置,其特征在于,所述控制装置基于从所述处理部输出的所述信息来生成用于对所述机械臂的驱动部进行控制的控制信号,并将所生成的所述控制信号输出至对所述机械臂的所述驱动部进行控制的机器人控制部。
37.根据权利要求36所述的控制装置,其特征在于,所述控制装置基于从所述处理部输出的所述信息与所述末端执行器的所述校准的结果来生成所述控制信号。
38.根据权利要求36或37所述的控制装置,其特征在于,
39.根据权利要求36或37所述的控制装置,其特征在于,
40.根据权利要求28至39中任一项所述的控制装置,其特征在于,所述末端执行器是能够照射加工光的光照射装置、能够喷出焊料的喷出装置以及能够保持所述对象物的保持装置的至少一个。
41.根据权利要求28至40中任一项所述的控制装置,其特征在于,
技术总结
照射使配置于电路基板的焊料熔融的加工光的焊接装置包括:光照射装置,具有检流镜,经由所述检流镜来照射加工光;检测装置,对来自电路基板的光进行检测,生成图像数据与形状数据中的至少一个数据;机械臂,设有光照射装置与检测装置,且具有使光照射装置与检测装置移动的驱动部;以及控制装置,基于伴随检测装置的位移而变化的至少一个数据来控制检流镜的方向,以使来自与检测装置一同位移的光照射装置的加工光照射至同一位置。
技术研发人员:细见幸司,佐藤真路,宫川智树,长谷川智志,三村晃平,平田纯也,清水飒
受保护的技术使用者:株式会社尼康
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!