干扰检查装置的制作方法
本发明关于一种干扰检查装置。
背景技术:
1、为了搜索机器人的动作路径,在虚拟环境进行机器人与周边机器或安全栅栏等周边障碍物的干扰检查。
2、就这点来说,已知一种技术,其为了判定机器人与周边障碍物的干扰,使用构成机器人和周边障碍物的三维模型的三角网格数据来进行干扰检查。例如参照专利文献1。
3、另外,已知一种技术,其通过利用相当于简易的凸包的多面体,来高速地进行伴随有以三维形状作为对象的干扰计算的处理,所述三维形状是由以高次的曲面式表现的自由曲面或多个自由曲面所构成的三维形状。例如参照专利文献2。
4、另外,已知一种技术,其使用体素模型来对机器人与周边障碍物进行干扰检查,所述体素模型具有多个体素,或具有被体素化的球及圆柱。例如参照专利文献3。
5、现有技术文献
6、专利文献
7、专利文献1:日本特开2020-179441号公报
8、专利文献2:日本特开2002-342395号公报
9、专利文献3:日本特开2012-232408号公报
技术实现思路
1、发明所要解决的课题
2、在专利文献1中,当进行使用了三角网格的三维模型的干扰检查时,虽然可以得到正确的判定结果,但存在计算成本非常高的问题(特别是包含的三角网格数很多时)。
3、另外,在专利文献2,根据周边障碍物的形状,凸包所占有的空间有时比实际的形状大,干扰检查的精度有时会降低。
4、另外,在专利文献3,当体素所包含的球或圆柱比实际的机器人或周边障碍物大,机器人与周边障碍物接近时,会有始终成为干扰状态的问题。
5、因此,期望以较少的数据量来将机器人和周边障碍物的形状模型化,并且提高干扰检查的精度。
6、用于解决课题的手段
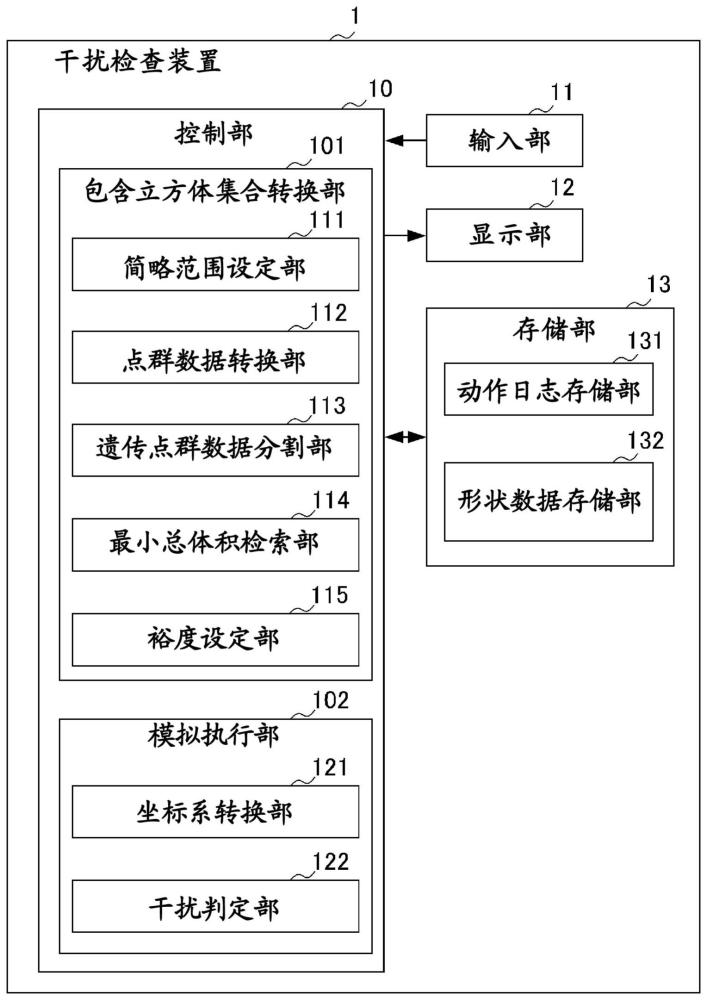
7、本公开的干扰检查装置的一方式是一种进行机器人与周边障碍物之间的干扰检查的干扰检查装置,其中,所述干扰检查装置具备:包含长方体集合转换部,其将所述机器人和所述周边障碍物分别转换成长方体的集合的三维模型;干扰判定部,其通过基于动作程序的所述机器人和所述周边障碍物的所述三维模型的动作的模拟,来判定所述机器人的所述三维模型与所述周边障碍物的所述三维模型有无干扰。
8、发明效果
9、根据一方式,能够以较少的数据量来将机器人及周边障碍物的形状模型化,并且提高干扰检查的精度。
技术特征:
1.一种进行机器人与周边障碍物之间的干扰检查的干扰检查装置,其特征在于,
2.根据权利要求1所述的干扰检查装置,其特征在于,
3.根据权利要求1或2所述的干扰检查装置,其特征在于,
4.根据权利要求2所述的干扰检查装置,其特征在于,
技术总结
以较少的数据量来将机器人和周边障碍物的形状模型化,并且提高干扰检查的精度。干扰检查装置进行机器人与周边障碍物之间的干扰检查,其中,所述干扰检查装置具备:包含长方体集合转换部,其将所述机器人和所述周边障碍物分别转换成长方体的集合的三维模型;干扰判定部,其通过基于动作程序的所述机器人和所述周边障碍物的所述三维模型的动作的模拟,来判定所述机器人的所述三维模型与所述周边障碍物的所述三维模型有无干扰。
技术研发人员:吴白阳
受保护的技术使用者:发那科株式会社
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!