用于机器人轨迹规划的方法和设备与流程
本发明涉及一种用于规划机器人单元的移动轨迹的方法和设备。
背景技术:
1、常规地,针对机器人单元的轨迹规划是由程序员和电子控制器来完成的,其中程序员定义待由机器人单元遵循的路径,电子控制器通过将机器人单元应当位于该点的时刻与该路径的每个点相关联以使花费在该路径上的时间或能量最小化的方式从该路径导出轨迹。在最简单的情况下,路径的初始点和最终点可以是预先确定的,例如通过必须在初始点拾取工具或工件并且被运输到最终点以便在那里对其进行加工处理的要求所预先确定,并且由程序员完成的定义工作可以仅仅是决定是否允许机器人单元沿着直线路径(或一些其它默认路径)移动,或者如果由于某种原因默认路径不实际,则选择一些中间点并且对从初始点到中间点的路径和从中间点到最终点的路径重复该过程。在任何一种情况下,都预期到时间或能量消耗不是最佳的。
2、虽然如果默认路径将导致机器人单元与障碍物碰撞,则必须定义中间点的决定可能是容易的,并且选择中间点使得可以避免障碍物会是简单直接的,但是判断机器人的效率是否可以通过此类措施得到改进是不容易的,并且程序员的大量工作时间会被花费在这一努力上。
技术实现思路
1、因此,本发明的目的是便于找到有效的轨迹。
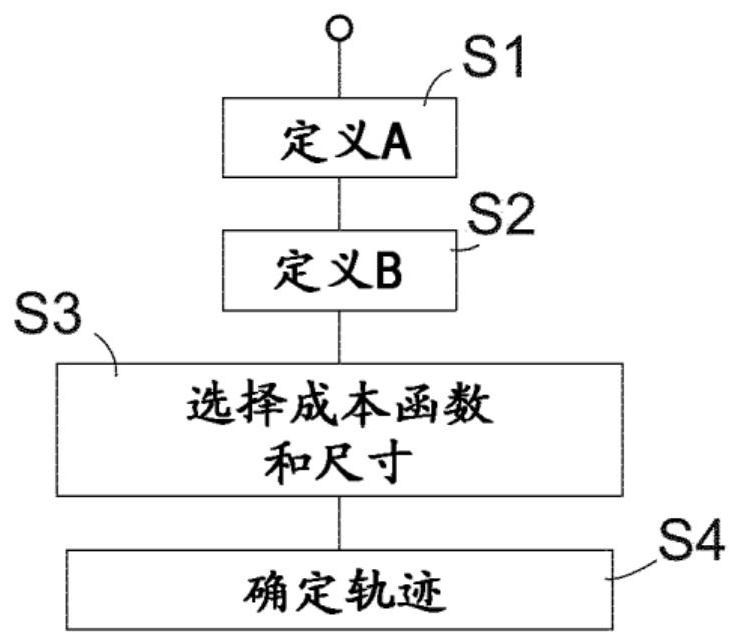
2、该目的通过一种用于定义机器人单元在多维空间中沿从初始点到最终点的路径移动的轨迹的方法来实现,该路径中的每个点具有多个空间坐标,该空间坐标是位置和/或取向坐标,其中该轨迹是将初始时刻映射到该路径的该初始点、将最终时刻映射到该最终点以及将中间时刻映射到该路径的中间点的连续映射,该方法包括以下步骤:定义将成本值与给定轨迹相关联的成本函数;定义所述多维空间的多维子空间;以及在沿着所述子空间的不同路径延伸的轨迹之中确定使该成本函数最小化的轨迹。
3、虽然在常规方法中,当路径被预先确定并且假定机器人单元沿着该路径前进时,路径的每个点被分配机器人单元将实际位于所述点的时刻,并且实际上可以被优化的仅是机器人单元沿着该路径前进的速度。然而,当采用相反的视角时,假设机器人单元从它位于初始点的初始时刻前进到它位于最终点的最终时刻,来自整个子空间的点可以被分配给每个时刻,从而产生更大自由度的优化。
4、显然,当子空间是多维空间时,实现最大自由度的优化,并且对将被包含在轨迹中的点的选择完全没有限制。
5、另一方面,考虑其维度数量实际上小于多维空间的维度数量的子空间以便减少所涉及的计算时间会是合适的。如果预先知道例如某个坐标是不相关的,则这可以在不降低优化的质量的情况下被完成。例如当机器人单元正在处理旋转工具或旋转对称工件时,子空间可以不具有与工具或工件的轴线相关联的取向坐标维度。
6、在实际的实施例中,多维空间可以具有两个位置坐标,并且可选地,具有取向坐标,并且机器人单元可以包括交通工具,该交通工具可以在表面上沿两个方向移位,并且通过垂直于所述表面的轴线执行偏航移动。可替代地,多维空间可以具有三个位置坐标,并且可选地具有多达三个取向坐标,在这种情况下,机器人单元可以包括末端执行器,优选地与起重机架或铰接式机器人臂相关联。
7、成本函数可以是轨迹的空间坐标中的至少一个空间坐标的时间导数的递增函数。导数可以是一阶的,即线性速度或角速度,二阶的,即加速度,或三阶的,即急动度。在任一情况下,导数的高值引起高成本的事实将使得优化能够避免具有这种高值的轨迹,并且因此将减少磨损并且改进机器人单元的可靠性。附加地或备选地,成本函数可以是由沿给定轨迹的给定坐标所假定的最大值和最小值之间的差的递增函数。坐标的最大值和最小值之间的大的差不利的成本函数将引起该方法来避免不必要的远距离移动。这样优化的轨迹还将涉及低速,从而可以预期磨损和能量消耗是低的。
8、为了确保轨迹将满足预先确定的用户需求,可以在反映该需求的约束下执行确定使成本函数最小化的轨迹的步骤。
9、该约束可以针对空间坐标中的至少一个空间坐标的时间导数施加条件,优选地针对速度、加速度或急动度。以此方式,例如可以考虑到机器人的技术限制。
10、在大多数实际情况下,所施加的条件将是针对所述时间导数的上限。通过这种条件,可以确保轨迹将不涉及超过机器人单元的能力的速度或加速度。
11、在优选实施例中,无论该机器人单元的能力如何,选择该上限,即,以便在执行所规划的轨迹时,当该机器人单元与静止的人碰撞时,所传递的能量的量保持在被认为对该人没有伤害风险的水平。实际上,根据复杂程度和关于环境的假设,可以以不同的方式实现所传递的能量的量不应超过给定阈值的需求。可以假设,例如,碰撞是完全无弹性的,并且人可能无法后退,人可能会陷于机器人和墙壁之间。在这种情况下,可能有必要假设机器人的全部动能将会被传递到人,并且因此必须不超过阈值,并且考虑到机器人单元的惯性,相应地设置针对机器人单元的速度限制。如果确定人将能够移动离开机器人,则假设在碰撞之后-并且在机器人单元可以被减速之前-它和人将以由动量守恒定律确定的相同速度移动,可以计算所传递的能量的量。还可以考虑到机器人单元在地面上的高度和机器人单元在该高度处可能撞击的人的身体部位的脆弱性来设置能量阈值。
12、伤害风险不仅仅与能量传递有关;即使所传递的能量可忽略不计,压力也足以引起伤害或疼痛。因此,在使成本函数最小化中所考虑的另外的约束应当限制由机器人单元在表面上施加的压紧力。
13、根据另一个实施例,所施加的条件可以是该机器人单元的取向与时间导数的向量的方向之间的关系,特别地,该向量垂直于该机器人单元的表面。在这种情况下,工件可以被放置在该表面上,类似于托盘上的物体,而不需要任何类型的横向夹具,并且当机器人单元移动时将保持站立在表面上。这将允许比由夹具类型机器人单元一个接一个地抓取并移动它们更有效地传送多个工件。
14、根据又一实施例,所施加的条件可以是针对被施加在驱动机器人单元沿着轨迹移动的致动器上的负载的上限。通过限制负载,可以避免机器人单元的过早磨损。
15、还可以通过将成本函数定义为被施加在驱动机器人单元沿着轨迹移动的致动器上的负载的递增函数来实现磨损的减少。虽然上述约束将安全地防止任何负载超过限制,但是将自由地允许负载在轨迹的大部分上接近阈值,成本函数将使整个轨迹上的负载最小化,但是如果机器人单元没有其它方式到达最终点,则仍将允许高负载发生。
16、本发明的上述目的还通过一种机器人系统来实现,该机器人系统包括机器人单元和适于执行上述方法的运动控制器,或者通过一种计算机程序产品来实现,当在计算机上执行该计算机程序产品时,该计算机程序产品使得计算机能够执行该方法。
技术特征:
1.一种用于定义机器人(1)在多维空间中沿从初始点(a)到最终点(b)的路径移动的轨迹的方法,所述路径的每个点具有多个空间坐标,所述空间坐标是位置坐标和/或取向坐标,其中所述轨迹是将初始时刻映射到所述路径的所述初始点(a)、将最终时刻映射到所述路径的所述最终点(b)以及将中间时刻映射到所述路径的中间点的连续映射,所述方法包括以下步骤:定义(s3)将成本值与给定轨迹相关联的成本函数;定义(s3)所述多维空间的多维子空间;以及在沿着所述子空间的不同路径延伸的轨迹之中确定(s4)使所述成本函数最小化的轨迹。
2.根据权利要求1所述的方法,其中所述子空间是所述多维空间。
3.根据权利要求1所述的方法,其中所述子空间的维度数量小于所述多维空间的维度数量。
4.根据权利要求1、2或3所述的方法,其中所述多维空间具有两个位置坐标,并且所述机器人包括交通工具,或者所述多维空间具有三个位置坐标,并且所述机器人包括末端执行器(4)。
5.根据权利要求1至4中任一项所述的方法,其中所述成本函数是所述空间坐标中的至少一个空间坐标的时间导数的递增函数,优选速度加速度或急动度或由沿所述给定轨迹的给定坐标所假定的最大值和最小值之间的差的递增函数。
6.根据权利要求1至5中任一项所述的方法,其中确定使所述成本函数最小化的所述轨迹的所述步骤是在针对所述空间坐标中的至少一个空间坐标的时间导数的约束下被执行的,优选针对速度、加速度或急动度,或者是在针对由沿着所述给定轨迹的给定坐标所假定的最大值与最小值之间的差的约束下被执行的。
7.根据权利要求6所述的方法,其中所施加的条件是所述时间导数的上限。
8.根据权利要求7所述的方法,其中,选择所述上限,以便在执行所规划的轨迹时,当所述机器人单元与静止的人碰撞时,将所传递的能量的量保持在被认为对所述人没有伤害风险的水平。
9.根据前述权利要求中任一项所述的方法,其中在使所述成本函数最小化中所考虑的另外的约束限制由所述机器人单元在表面上施加的压紧力。
10.根据权利要求6所述的方法,其中所施加的所述约束是所述机器人(1)的取向与时间导数的向量的所述方向之间的关系,特别地所述向量垂直于所述机器人单元的表面(9),或者所述向量的平行于所述表面(9)的分量小于所述向量的垂直于所述表面的分量乘以预先确定的因子(μ)。
11.根据权利要求6所述的方法,其中所述约束针对被施加在驱动所述机器人(1)沿所述轨迹移动的致动器上的负载(u)施加上限(τmax)。
12.根据前述权利要求中任一项所述的方法,其中所述成本函数是被施加在驱动所述机器人(1)沿所述轨迹移动的致动器上的负载(u)的递增函数。
13.一种机器人系统,包括机器人(1)和适于执行前述权利要求中任一项所述的方法的操作控制器(5)。
14.一种计算机程序产品,当所述计算机程序产品在计算机上被执行时,所述计算机程序产品能够使所述计算机执行根据权利要求1至12中任一项所述的方法或用作根据权利要求13所述的操作控制器(5)。
技术总结
一种用于定义机器人(1)在多维空间中沿从初始点(A)到最终点(B)的路径移动的轨迹的方法,该路径中的每个点具有多个空间坐标,该空间坐标是位置和/或取向坐标,其中该轨迹是将初始时刻映射到路径的初始点(A)、将最终时刻映射到路径的最终点(B)以及将中间时刻映射到路径的中间点的连续映射,该方法包括以下步骤:定义(S3)将成本值与给定轨迹相关联的成本函数;定义(S3)所述多维空间的多维子空间;以及在沿着所述子空间的不同路径延伸的轨迹之中确定(S4)使该成本函数最小化的轨迹。
技术研发人员:阿尔内·瓦尔堡,马蒂亚斯·博克曼,贾科莫·斯帕姆皮纳托,米凯尔·诺尔洛夫,尼玛·埃纳亚蒂,乔纳斯·豪林,黛博拉·克莱维尔
受保护的技术使用者:ABB瑞士股份有限公司
技术研发日:
技术公布日:2024/5/12
- 还没有人留言评论。精彩留言会获得点赞!