一种晶圆电镀真空保湿用夹持机械手的制作方法
本发明涉及晶圆电镀,尤其涉及一种晶圆电镀真空保湿用夹持机械手。
背景技术:
1、在半导体制造中采用电镀工艺析出电镀液中的金属离子至晶圆的沟槽内以形成金属导线。在集成电路制造中,高深宽比是对光刻工艺中所形成的图形的描述,当晶圆上窗口图形的深宽比达到1:2或晶圆上通孔的孔径小于50微米且孔深大于100微米时,通孔和窗口图形内部会留存气体,晶圆随夹具一同进入电镀腔的过程中通孔以及窗口图形处容易产生气泡,导致通孔内或图形窗口内电镀失败,故为了防止窗口内、或者通孔的电镀失效,需要排除窗口或通孔内的气体,并使用纯水来填充湿润。
2、公布号为cn115116899b的中国专利公开了一种晶圆真空湿润机构及晶圆真空湿润方法,通过升降气缸下降,腔体下降,支架高出腔体顶部,机械手将晶圆放在支架上的晶圆夹块之间,升降气缸升起,腔体升起,腔体内形成密闭,底座内的负压打开,对腔体内形成负压真空,上盖的液路通,旋转气缸启动,摆臂边喷边摆动,在喷液过程中,电机旋转,晶圆转动,晶圆表面得到湿润,湿润后,摆臂归位,液路关闭,晶圆继续转动,让多余液体甩出,以反溅罩将晶圆表面的水快速反溅至腔体底部,由于进液,释放了真空,其程度使得升降气缸能够在完成真空甩干后,把腔体向下拉,完成真空湿润后,腔体的排液口将液体排除,双臂机械手,取晶圆后再放入下一片需要加工的晶圆,如此循环工作;
3、因而晶圆在真空湿润时,通过机械手将晶圆放置在夹块座上,多个晶圆夹块的共同作用下能够实现对一个晶圆的承托和固定,但是晶圆夹块在电机的驱动下会带动晶圆进行转动,从而具有离心力,持久的离心力会使晶圆夹块夹持产生疲劳,进而可能会使得晶圆产生脱附,同时晶圆经受纯水喷洒时会冲击晶圆,所以不对晶圆进行限位,会造成晶圆的损伤或脱附,所以本发明的提出解决了上述技术问题的不足。
技术实现思路
1、基于现有的上述技术问题,本发明提出了一种晶圆电镀真空保湿用夹持机械手。
2、本发明提出的一种晶圆电镀真空保湿用夹持机械手,包括晶圆真空湿润时进行支撑的底座,所述底座的内部设置有吊装的电机,所述底座的顶部固定安装有防溅罩,所述电机和所述防溅罩之间以吊装环连接,位于所述底座顶面以及位于所述防溅罩侧边下方的腔体底部上表面之间设置有橡胶带,并分别配合有压环压紧,所述底座内设置有真空接头,所述真空接头与所述防溅罩的底面固定设置并位于电机的一侧,所述防溅罩的上方设置有真空盖板,所述真空盖板的中心固定于所述电机的电机轴连接的传动轴顶部,所述真空盖板的中心上方通过支架固定连接有夹块座,所述夹块座的上方设置有水平移动机构,所述水平移动机构的上表面连接有安装底板,所述安装底板的上表面设置有环抱机构,所述环抱机构的内部设置有夹持机构。
3、其中,所述水平移动机构带动所述安装底板在夹块座的上方进行水平的来回摆动而使得夹持的晶圆表面接收纯水保湿。
4、其中,所述环抱机构在展开后对放置的晶圆外表面进行环抱限位。
5、其中,所述夹持机构在所述环抱机构展开后进行伸缩而实现对晶圆的夹持动作。
6、优选地,所述水平移动机构包括呈环形阵列分布分别固定安装在所述夹块座上表面和所述安装底板下表面的u形状的连接块,上下相对的两个所述连接块的内表面通过连接轴转动连接有矩形框。
7、通过上述技术方案,晶圆电镀过程中,图形的深宽比达到一定程度,为了防止窗口内、或者通孔的电镀失效,需要排除窗口或通孔内的气体,并使用纯水来填充湿润,晶圆通过摆臂旋转喷洒纯水进行保湿,为了使晶圆表面均匀接受纯水的喷洒保湿,从而通过矩形框的来回转动而间接实现安装底板在夹块座的上表面进行水平摆动,进而带动安装底板上表面夹持的晶圆摆动而实现其均匀保湿,并能加快液体的排出。
8、优选地,所述水平移动机构还包括铰接连接在上下两个所述矩形框内表面的摆动轴,所述连接块的一侧表面固定安装有伺服电机,所述伺服电机的输出轴外表面通过联轴器与所述矩形框的连接轴表面固定连接。
9、通过上述技术方案,为了实现安装底板的水平摆动,从而通过三个伺服电机分别单独进行工作,使每个伺服电机控制其连接的矩形框来回转动,进而使得铰接的摆动轴偏转,并在其余两个摆动轴的联动下带动安装底板水平移动,从而可使摆臂喷洒的纯水覆盖在晶圆的表面。
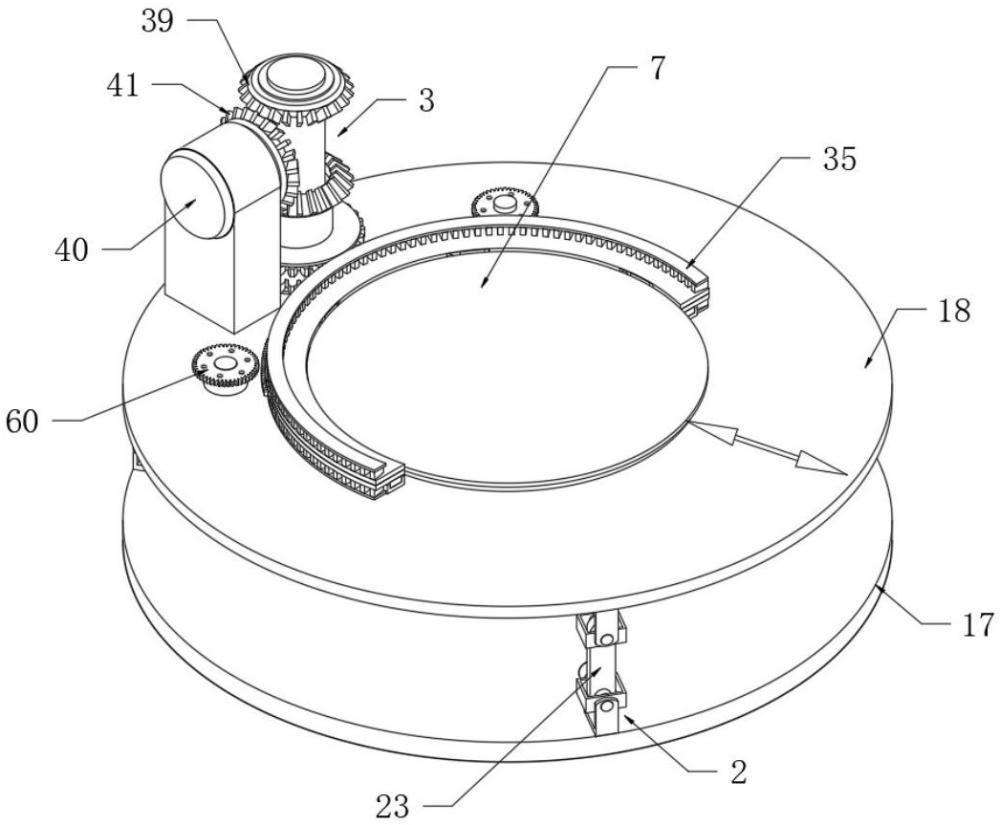
10、优选地,所述环抱机构包括固定连接在所述安装底板中心上表面的定位底托,所述定位底托的上表面与所述晶圆的下表面滑动接触,所述安装底板靠近所述晶圆外圆外表面的上表面固定安装有带有缺口的环形导轨。
11、通过上述技术方案,为了将晶圆放置真空保湿的腔体,从而通过机械臂将晶圆水平夹持后放置在安装底板的定位底托上,进而避免通过垂直吸附的方式将晶圆垂直向下放置在夹块上,因而可提高晶圆放置的效率,为了避免晶圆在保湿和移动时产生晃动而使其表面喷洒范围不均匀,从而在晶圆的外围设置环形导轨实现对晶圆的限位夹持,并且为了便于机械臂水平将晶圆放置在定位底托上,从而环形导轨的一侧开设有缺口。
12、优选地,所述环抱机构还包括滑动卡接在所述环形导轨内表面的环形导块,所述环形导块的上表面固定连接有环形限位块,所述环形限位块的上表面通过滚珠配合滑动连接有另一所述环形限位块,且两个所述环形限位块呈相反的环形转动。
13、通过上述技术方案,为了对晶圆进行限位,避免其因喷刷或移动而偏离定位底托,因而可对晶圆进行环抱,则通过控制两个环形限位块相反转动,从而两个环形限位块可形成闭合的环形而实现对晶圆的限位,并通过环形导块实现对底部的环形限位块进行支撑。
14、优选地,所述环抱机构还包括固定连接在两个所述环形限位块相对一侧表面的调节齿带,下端所述调节齿带靠近所述晶圆的内侧表面与所述环形导轨的外表面滑动连接,所述安装底板的一端上表面通过轴承转动连接有转动轴,所述转动轴的中部外表面转动套接有转管。
15、通过上述技术方案,在晶圆放置之后,为了控制环形限位块转动而实现对晶圆的环抱限位,则通过转动轴和转管分别转动,可带动两个环形限位块同步反向转动而实现其限位作用。
16、优选地,所述环抱机构还包括分别固定套接在所述转动轴和所述转管上下端外表面的调节齿轮和驱动锥齿轮,两个调节齿轮的外表面分别与所述调节齿带的齿槽内壁啮合,所述安装底板的上表面通过支撑柱安装有减速电机,所述减速电机的输出轴外表面通过联轴器固定连接有主动锥齿轮,所述主动锥齿轮的外表面分别与两个所述驱动锥齿轮的外表面啮合。
17、通过上述技术方案,为了驱动转动轴和转管同步转动而实现两个环形限位块的同步反向转动,则通过减速电机控制主动锥齿轮转动,而两个驱动锥齿轮呈上下分布与主动锥齿轮的外表面啮合,从而可使得两个驱动锥齿轮同步正反转动,再通过转动轴和转管控制两个调节齿轮转动,进而实现啮合的环形限位块转动,并在转动之后形成闭合的环形限位块而实现其环抱限位作用。
18、优选地,所述夹持机构包括开设在所述环形限位块内部的活动腔体,所述活动腔体的内壁呈弧形路径阵列分布转动连接有带有啮合齿的驱动轮,所述驱动轮的一侧表面向外延伸固定连接有夹持杆。
19、通过上述技术方案,环形限位块经过展开后可对晶圆的外表面进行环抱限位,为了对其进行夹持固定,从而通过活动腔体内的驱动轮转动而实现夹持杆展开延伸出活动腔体,并且夹持杆与晶圆外圈外表面接触的面的材质为硅胶,从而可避免对晶圆的损伤。
20、优选地,所述夹持机构还包括呈路径阵列分布在所述环形限位块内表面贯穿开设的展开孔,所述展开孔的一侧与所述活动腔体的内壁固定连通,所述夹持杆的外表面与所述展开孔的内壁滑动接触,所述活动腔体的内壁固定连接有导向滑板,所述导向滑板的凹槽内表面滑动连接有驱动齿带,所述驱动齿带的齿面与所述驱动轮的啮合齿表面啮合。
21、通过上述技术方案,为了使硅胶材质的夹持杆展开实现对晶圆外表面的接触夹持,从而在环形限位块展开闭合后,通过驱动齿带在导向滑板的内表面进行弧形转动,从而可带动多个啮合的驱动轮在活动腔体内部同步转动,进而可使得在展开孔内壁收缩的夹持杆伸展出来而接触抵压晶圆的外表面,因而可达到对晶圆夹持的效果。
22、优选地,所述夹持机构还包括呈对称分布在两个所述导向滑板和所述环形限位块对应面分别进行贯穿开设的路径孔,两个所述驱动齿带相对于齿面的一侧表面分别固定连接有一长一短的调节块,所述调节块的外表面与对应所述路径孔的内壁滑动连接,所述调节块远离所述驱动齿带的一侧表面固定连接有拨动齿,所述安装底板的上表面通过呈对称分布安装的转动电机安装有联动齿轮,每个所述联动齿轮的外表面与相对的所述拨动齿的外表面啮合。
23、通过上述技术方案,为了驱动夹持杆进行展开实现夹持作用,从而环形限位块转动时带动各自的调节块同步转动,并且为了实现两个环形限位块转动闭合,从而两个调节块长度不一,进而可避免联动齿轮因与拨动齿啮合阻碍环形限位块的转动,当两个环形限位块转动至对应位置后,调节块一侧的拨动齿正好与对应的联动齿轮外表面啮合,此时通过转动电机动作,可实现联动齿轮转动,从而带动啮合的调节块在路径孔的内壁进行移动,进而可带动驱动齿带进行转动,最终实现夹持杆的转动展开。
24、本发明中的有益效果为:
25、1、通过设置水平移动机构,可对夹持的晶圆在一定范围内进行水平移动,从而可使晶圆喷洒湿润均匀,在调节的过程中,通过三个伺服电机分别单独进行工作,使每个伺服电机控制其连接的矩形框来回转动,进而使得铰接的摆动轴偏转,并在其余两个摆动轴的联动下带动安装底板水平移动,从而可使摆臂喷洒的纯水均匀覆盖在安装底板上的晶圆表面,进而提高晶圆真空保湿的效率。
26、2、通过设置环抱机构,可对放置的晶圆进行环抱限位,从而可抵抗离心力产生的疲劳,在调节的过程中,通过减速电机控制主动锥齿轮转动,而两个驱动锥齿轮呈上下分布与主动锥齿轮的外表面啮合,从而可使得两个驱动锥齿轮同步正反转动,再通过转动轴和转管控制两个调节齿轮转动,进而实现啮合的环形限位块转动,并在转动之后形成闭合的环形限位块而实现其环抱限位作用,从而可实现限位在定位底托的上表面。
27、3、通过设置夹持机构,可对限位的晶圆进行夹持固定,在调节的过程中,通过驱动齿带在导向滑板的内表面进行弧形转动,从而可带动多个啮合的驱动轮在活动腔体内部同步转动,进而可使得在展开孔内壁收缩的夹持杆伸展出来而接触抵压晶圆的外表面,因而可达到对晶圆夹持的效果。
- 还没有人留言评论。精彩留言会获得点赞!