机器人多接口类型伺服驱动器混合控制方法及系统与流程
本发明属于多关节机器人,尤其涉及机器人多接口类型伺服驱动器混合控制方法及系统。
背景技术:
1、目前在很多应用领域,多关节机器人开始代替人工,通过与外部附加轴的配合开展作业。为此,需要将外部附加轴的伺服驱动器接到机器人控制系统中,实现协同工作。
2、现有技术中,机器人多轴控制系统通常只采用脉冲伺服方式或者总线伺服方式的其中一种。其中,脉冲型伺服控制器采用增量式编码器,将增量关节角转换成计数脉冲,用脉冲的个数表示位移的大小;总线型伺服控制器采用绝对位置式编码器,每一个位置对应一个确定的数字码。这导致在很多应用中附加轴伺服驱动器因接口不匹配无法直接使用,需要重新购买;另一方面,对于机器人本体关节来说,以6关节机器人为例,1-3关节需要较大功率的伺服驱动器,4-6关节需要较小功率的伺服驱动器。相比于针对每个关节选择相应功率的伺服驱动器来说,如果能选购一拖二的伺服驱动器,通过两两优化配置满足功率均衡,将大大降低机器人的成本。此外,在出现机器人伺服驱动器故障需要更换时,如果控制系统只提供单一一种伺服方式或者不能灵活配置,则无法使用现有的其它接口方式的伺服驱动器进行替换,这些都会增加成本支出和维护周期。为此我们提出机器人多接口类型伺服驱动器混合控制方法及系统。
技术实现思路
1、本发明实施例的目的在于提供机器人多接口类型伺服驱动器混合控制方法及系统,旨在解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、机器人多接口类型伺服驱动器混合控制方法,包括以下步骤:
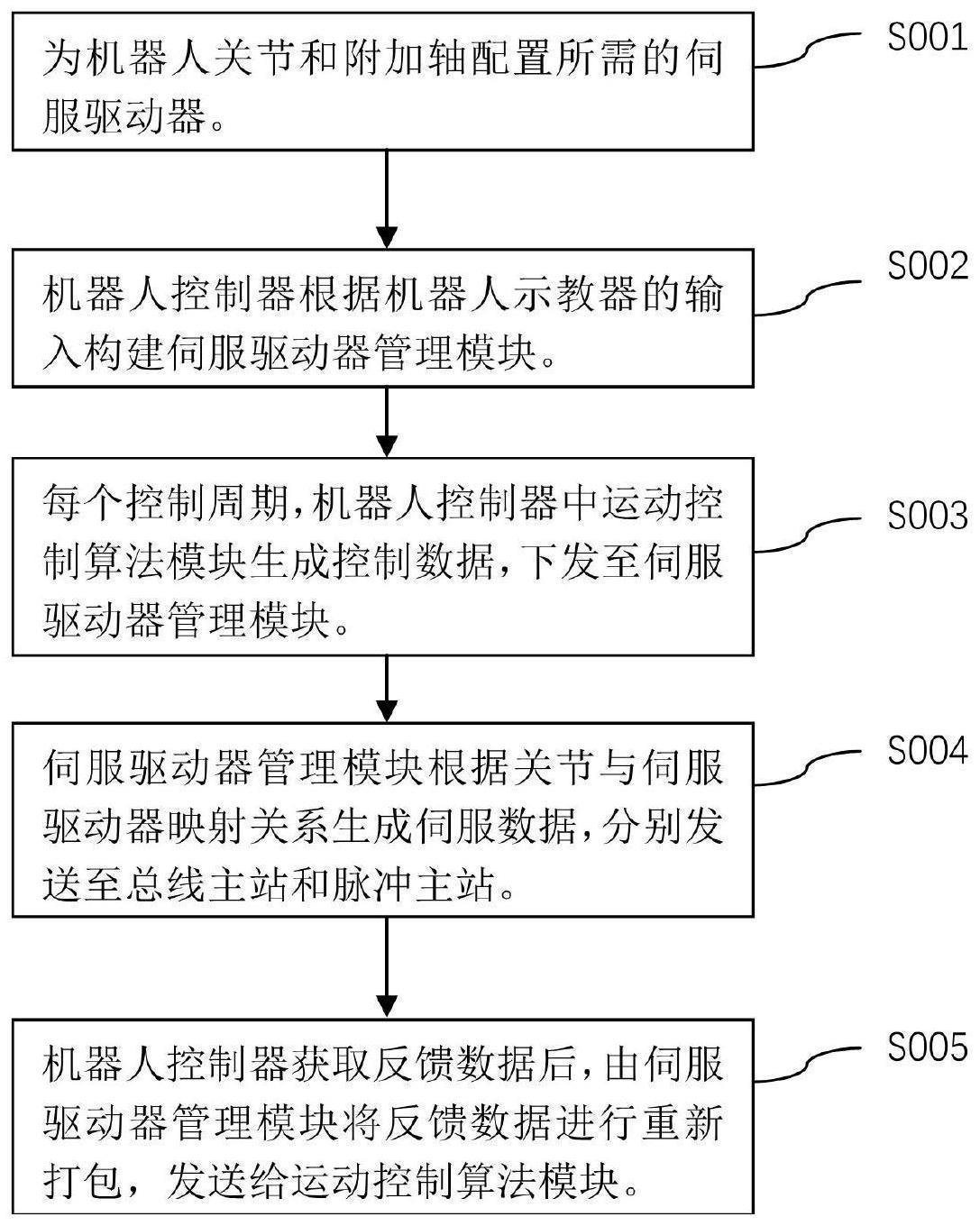
4、s001:为机器人关节和附加轴配置多种接口类型的伺服驱动器;
5、s002:机器人控制器根据机器人示教器上的输入构建伺服驱动器管理模块;
6、s003:每个控制周期,机器人控制器中运动控制算法模块生成控制数据,下发至伺服驱动器管理模块;
7、s004:伺服驱动器管理模块根据关节与伺服驱动器映射关系生成对应的伺服数据,分别发送至总线主站和脉冲主站;
8、s005:机器人控制器获取反馈数据后,由伺服驱动器管理模块将反馈数据进行重新打包,发送给运动控制算法模块。
9、进一步的,所述运动控制算法模块生成的控制数据为按机器人本体关节1、本体关节2、……、本体关节n、附加轴1、附加轴2、……、附加轴m顺序打包的增量关节角[a1,a2,a3,……,ax];
10、伺服驱动器管理模块发送给脉冲总站的伺服数据,为从控制数据中拆分出的使用脉冲型伺服驱动器的关节的增量关节角,按脉冲型伺服驱动器编号顺序进一步生成的脉冲数[b1,b2,b3,……,by];
11、伺服驱动器管理模块发送给总线总站的伺服数据,为从控制数据中拆分出的使用总线型伺服驱动器的关节的增量关节角,基于关节当前位置按总线型伺服驱动器编号顺序进一步生成的编码器数值[c1,c2,c3,……,cz];
12、其中:n为机器人本体关节数量、m为附加轴数量、y为脉冲型伺服驱动器数量、z为总线型伺服驱动器数量,x=n+m=y+z。
13、进一步的,所述机器人控制器获取的反馈数据为所有伺服驱动器返回的编码器位置的数据。
14、进一步的,所述重新打包是根据关节与伺服驱动器映射关系,按照机器人本体关节1、本体关节2、……、本体关节n、附加轴1、附加轴2、……、附加轴m的顺序打包,发回给运动控制算法模块,形成运动轨迹的闭环控制。
15、机器人多接口类型伺服驱动器混合控制系统,包括机器人示教器、机器人控制器、总线主站、脉冲主站、多个总线型伺服驱动器和多个脉冲型伺服驱动器,所述机器人示教器通过通信接口与机器人控制器连接。
16、进一步的,所述机器人控制器同时连接总线主站和脉冲主站,所述总线主站通过总线接口与总线型伺服驱动器连接,所述脉冲主站通过脉冲接口与脉冲型伺服驱动器连接。
17、进一步的,所述总线主站为ethercat总线主站,所述总线主站连接的总线型伺服驱动器为ethercat总线型伺服驱动器。
18、与现有技术相比,本发明的有益效果是:
19、该机器人多接口类型伺服驱动器混合控制方法及系统,可为机器人主体多个关节和多个附加轴优化配置多接口类型伺服驱动器,以满足功率均衡和型号匹配的要求,能够降低成本,并且更换和维护更为灵活。
技术特征:
1.机器人多接口类型伺服驱动器混合控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的机器人多接口类型伺服驱动器混合控制方法,其特征在于,所述运动控制算法模块生成的控制数据为按机器人本体关节1、本体关节2、……、本体关节n、附加轴1、附加轴2、……、附加轴m顺序打包的增量关节角[a1,a2,a3,……,ax];
3.根据权利要求1所述的机器人多接口类型伺服驱动器混合控制方法,其特征在于,所述机器人控制器获取的反馈数据为所有伺服驱动器返回的编码器位置的数据。
4.根据权利要求1所述的机器人多接口类型伺服驱动器混合控制方法,其特征在于,所述重新打包是根据关节与伺服驱动器映射关系,按照机器人本体关节1、本体关节2、……、本体关节n、附加轴1、附加轴2、……、附加轴m的顺序打包,发回给运动控制算法模块,形成运动轨迹的闭环控制。
5.机器人多接口类型伺服驱动器混合控制系统,其特征在于,包括机器人示教器、机器人控制器、总线主站、脉冲主站、多个总线型伺服驱动器和多个脉冲型伺服驱动器,所述机器人示教器通过通信接口与机器人控制器连接。
6.根据权利要求5所述的机器人多接口类型伺服驱动器混合控制系统,其特征在于,所述机器人控制器同时连接总线主站和脉冲主站,所述总线主站通过总线接口与总线型伺服驱动器连接,所述脉冲主站通过脉冲接口与脉冲型伺服驱动器连接。
7.根据权利要求6所述的机器人多接口类型伺服驱动器混合控制系统,其特征在于,所述总线主站为ethercat总线主站,所述总线主站连接的总线型伺服驱动器为ethercat总线型伺服驱动器。
技术总结
本发明适用于多关节机器人技术领域,提供了机器人多接口类型伺服驱动器混合控制方法及系统,本发明可为机器人主体多个关节和多个附加轴优化配置多接口类型伺服驱动器,以满足功率均衡和型号匹配的要求,能够降低成本,并且更换和维护更为灵活。
技术研发人员:王建文,杜列波,鲁琴
受保护的技术使用者:东莞市尔必地机器人有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!